
Fターム[5B057DC03]の内容
Fターム[5B057DC03]に分類される特許
81 - 100 / 1,739
車両周辺監視装置
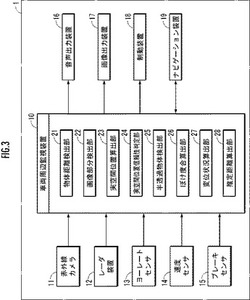
【課題】カメラとレーダ装置の組み合わせにより物体の実空間位置を算出するときに、車両と物体間の距離の誤検出により、不適切な実空間位置の算出がなされることを防止した車両周辺監視装置を提供する。
【解決手段】物体距離検出部21によりレーダ装置12の測距データから検出された物体をカメラの撮像画像に投影して、該物体の画像部分を検出する画像部分検出部22と、物体距離検出部21による検出距離に基づいて、物体の実空間位置を算出する実空間位置算出部23と、前記検出範囲内に存在する格子フェンスを検出する半透過物体検出部25と、カメラ11の撮像方向で、格子フェンスと重なる位置に存在する物体については、実空間位置算出部23による実空間位置の算出を禁止する実空間位置信頼性判定部24とを備える。
(もっと読む)
画像処理装置およびプログラム

【課題】1つの表が複数頁に分割されて印刷された場合でも、印刷された複数頁の原稿を読み込んで元の表を電子文書として復元することを可能とする。
【解決手段】表領域抽出部42は、スキャナ16により読み取られた複数頁からなる画像データの各頁から、表領域の画像をそれぞれ抽出する。表構造データ生成部43は、抽出された各表領域の画像からその表の表構造データをそれぞれ生成する。表接続性判定部45は、表構造データ生成部43により生成された各頁の表の表構造データに基づいて、各表どうしの接続可能性を判定する。表データ復元部44は、表接続性判定部45により判定された各表どうしの接続可能性に基づいて、各表を接続して元の表を復元するための接続順序を決定し、決定した接続順序に基づいて各表どうしを接続して分割前の1つの表データを復元する。
(もっと読む)
位置検出装置、位置検出方法及びコンピュータプログラム
【課題】検出対象の位置を精度良く検出する位置検出装置を提供する。
【解決手段】所定の位置で所定の向きに設置された撮像装置によって撮像された第一の画像から、検出対象に含まれる第一特徴点eye_2l及び第二特徴点eye_2rの平面座標の位置を検出し、第一特徴点及び第二特徴点の空間座標の位置を取得し、第一特徴点と第二特徴点との間の平面座標における距離と空間座標における距離との比を算出し、撮像装置によって撮像された第二の画像から、検出対象に含まれる第一特徴点及び第二特徴点の平面座標の位置を検出し、距離比と、第二の画像における第一特徴点及び第二特徴点の平面座標と、に基づいて第一特徴点及び第二特徴点の空間座標の位置を検出する。
(もっと読む)
瞼検出装置、瞼検出方法及びプログラム
【課題】ドライバの瞼を正確に検出する。
【解決手段】ドライバの顔が写る画像から検出され、ペアリングされたエッジ同士の距離dを順次算出する。そして、算出した距離dの変化に基づいて、瞼のエッジのペアとしての確度が低い候補を除外していき、最終的に残ったエッジのペアを、上瞼のエッジと下瞼のエッジのペアとして検出する(S208)。このため、瞼のエッジに近い特徴だけでなく、瞼としての振る舞いを考慮した検出を行うことができる。したがって、ドライバの瞼のエッジを、正確に検出することが可能となる。
(もっと読む)
画像処理装置及び画像処理方法
【課題】重なり領域を有する2つの入力画像を張り合わせた画像において、重なり領域と重なりのない領域との間を滑らかにつなぐこと。
【解決手段】画像処理装置は、第一入力画像を基準画像として用い、第二入力画像に対して第一位置合わせを実行し、第二入力画像における基準画像の中の重なり領域に位置する各第一画素とマッチングをとる第二画素を探すための第一位置合わせ装置と、第一画素と第二画素の位置に基づいて出力画像における第一画素に対応する出力画素の位置を計算し、その中の第一画素と第二画素の位置に対してそれぞれ重み付けを行い、第一画素は、基準画像の重なりのない領域からの最短距離が小さければ小さいほど、第一画素の位置に対する重みは大きくなるような関係を成すための出力画素位置決定装置と、第一画素と第二画素の少なくとも一方の画素値に基づいて出力画素の画素値を計算するための出力画素値決定装置とを備える。
(もっと読む)
画像出力装置、画像出力方法、およびプログラム
【課題】従来、画像を視るユーザにとって、刺激が大きすぎたり、目が疲れやすい等、不都合があった。
【解決手段】入力画像を取得する入力画像取得部と、前記入力画像に含まれる被写体の目標とする属性値である1以上の目標属性値を取得する目標属性値取得部と、前記入力画像を用いて構成される出力画像に含まれる前記被写体の1以上の属性値を取得する属性値取得部と、前記目標属性値取得部が取得した1以上の目標属性値と、前記属性値取得部が取得した1以上の属性値との差を示す1以上の差情報を取得する差情報取得部と、前記1以上の差情報が、予め決められた条件を満たさない場合、前記入力画像を用いて構成される出力画像の出力態様を変更し、出力する画像出力部とを具備する画像出力装置により、画像を視るユーザにとっての不都合を小さくできる、または不都合をなくすことができる。
(もっと読む)
ロボット制御システム、ロボットシステム及びマーカー処理方法
【課題】 操作対象物に設定された第1のマーカーの面積重心に基づき、マーカー向き情報を特定できるロボット制御システム等の提供。
【解決手段】 ロボット制御システム10は、撮像部20から得られる画像情報に基づいて画像処理を行う処理部110と、処理部110の処理結果に基づいてロボット30の制御を行う制御部120と、を含む。そして、処理部110は、画像情報に基づいて、ロボット30の操作対象物に設定された第1のマーカーの認識処理を行い、第1のマーカーの認識処理の結果に基づいて、第1のマーカーに設定された第1の画像構成要素の面積重心を求め、面積重心に基づいて、第1のマーカーが示す向きを表すマーカー向き情報を求める。さらに、制御部120は、マーカー向き情報に応じてロボット30を制御する。
(もっと読む)
対象物把持装置、対象物把持装置の制御方法、およびプログラム
【課題】対象物の姿勢を推定して把持を行う処理を高速化すると共に、把持動作の失敗確率を低減する。
【解決手段】対象物の姿勢を姿勢推定パラメータに基づいて推定する推定部と、推定部により推定された対象物の姿勢に基づいて対象物を把持する把持部と、把持部による把持の失敗を検知する検知部と、検知部により把持の失敗が検知された際の対象物の姿勢に基づいて姿勢推定パラメータを修正する修正部と、を備える。
(もっと読む)
画像入力装置、会議装置、画像処理制御プログラム、記録媒体
【課題】カメラの高さの変化を含んだ任意の位置での画像処理が可能な画像入力装置を提供すること。
【解決手段】被写体を撮影するカメラ本体77と、被設置面に設置される筐体2と、カメラ本体77をチルト可能に支持させると共に、筐体2に上下方向へ揺動可能に支持されたアーム部71と、第1及び第2の加速度センサS1、S2を備えアーム部71とカメラ本体77の傾きを検出させる傾き検出部Sと、傾き検出部Sが検出した傾きと当該装置の寸法情報とに基づいて、被設置面からカメラ本体77までの高さ高さ距離情報Lを算出し、その算出した高さ距離と傾き検出部Sが検出したカメラ本体77の傾きとからカメラ本体77が撮影する被写体の種類を特定し、その特定した種類の被写体に適した画像処理を実行する制御部を備えて画像入力装置を構成する。
(もっと読む)
試着支援システム
【課題】消費者が所持しているアパレル品と店舗等で販売されているアパレル品のコーディネイトを仮想的に試すことができるシステムを提供する。
【解決手段】モニタ装置2は、ログインしたユーザのユーザ品の画像をデータベース装置3から取得した後、ユーザ品又は店舗品の画像をアパレル品のカテゴリ毎にユーザが選択するためのユーザ画面をタッチパネル24に表示する。そして、モニタ装置2は、ユーザ画面にてユーザが画像とカテゴリを選択すると、モニタ25に表示されている撮影画像に含まれる顔画像を検出し、該カテゴリに対応する顔からの相対距離と顔画像の位置から合成画像の表示位置を、顔画像のサイズから合成画像の表示サイズをそれぞれ決定し、合成画像を撮影画像に合成して表示する。
(もっと読む)
走行可能領域検出装置及びプログラム
【課題】走行可能領域と走行不可能領域との境界が不明瞭な場合であっても、適切に走行可能領域を検出する。
【解決手段】モノジェニック信号変換部22で、取得した画像の各点を、局所領域内の輝度値の変化の極大点及び極小点の一方を0度、他方を180度で表したときの各点の局所位相を含むモノジェニック信号に変換し、局所コスト算出部24で、局所位相が90度に近いほど小さくなる局所コストを、走行可能領域の左端に相当する点と、走行可能領域の右端に相当する点との組み合わせ毎に算出する。最適経路探索部26で、画像上での走行可能領域の形状に基づいて、経路を構成する各点が連続する方向に制限を設けた複数の経路各々に沿って、局所コストを累積した累積コストを算出し、累積コストが最小となる最適経路を探索する。領域検出部28で、最適経路に基づいて、走行可能領域を検出する。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】処理時間を低減することができる画像処理装置、画像処理方法、およびプログラムを提供する。
【解決手段】モニタ22は、計測対象物の画像と、計測対象物に対応する物体であって予め算出された3次元形状を有する物体の画像とを表示する。CPU34cは、リモコン23を介して入力される指示に基づいて、計測対象物の画像上の第1の点と物体の画像上の第2の点とを指定する。CPU34cは、第1の点を基準とする第1の図形と、第2の点を基準とする第2の図形との幾何学計算を行い、幾何学計算の結果に基づいて、計測対象物の画像と物体の画像との少なくとも一方の姿勢または位置を調整する。CPU34cは、姿勢または位置が調整された後、リモコン23を介して入力される指示に基づいて指定された計測位置に対応する物体上の空間座標を算出し、算出した空間座標に基づいて、物体のサイズを算出する。
(もっと読む)
画像処理方法、画像処理装置、スキャナ及びコンピュータプログラム
【課題】本の上下の輪郭線に基づき本のページの曲面を補正する画像処理方法等を提供する。
【解決手段】画像処理方法は、概して、2次元画像における曲面上で消失点を取得するステップと、消失点によって前記曲面の上輪郭線及び下輪郭線の間の全ての直線セグメントを取り出すステップと、平行な直線セグメントを得るよう透視歪みを除去するステップと、直線セグメントの長さを取得し、その長さに従って3次元空間における各直線セグメントの正確な幅及び直線セグメントの奥行き増分を取得するステップと、正確な幅及び奥行き増分に従って各直線セグメントの拡大された幅を取得するステップと、曲面を平面に変換するよう曲面の全体的な拡大された幅を取得するステップと、曲面上の画像コンテンツを平面上に変換するステップとを有する。
(もっと読む)
画像処理装置および方法、プログラム、並びに記録媒体
【課題】リンギングやゴースト等のアーティファクトを抑制しつつ、より小さい回路規模で、かつ、より少ない計算量で、ぶれまたはぼけを補正する。
【解決手段】時間的に連続する画像のぶれまたはぼけを補正する画像処理装置において、零点成分抽出部は、注目する注目フレームに位置合わせされた、注目フレームより時間的に前のフレームであって、ぶれまたはぼけが補正された補正済みフレームから、所定のフィルタを用いて注目フレームに含まれない周波数成分を抽出し、合成部は、零点成分抽出部により抽出された周波数成分と注目フレームとを合成する。本技術は、デジタルカメラ等の撮像装置に適用することができる。
(もっと読む)
走行路認識装置及び走行路認識用プログラム
【課題】高度な計算処理能力を有しない低廉な装置であっても走行車線上の標示線を遠方まで高精度で検出する。
【解決手段】領域解像度設定部16が、外界撮像部11が撮像した画像に対して、移動体の前方かつ近傍に第1画像処理領域を設定すると共に、移動体運動情報取得部14が取得した移動体の速度情報が示す移動体の速度が所定値以上の場合に、移動体の速度が速くなるに従って位置が第1画像処理領域より徐々に遠方となり、かつ移動体の速度が速くなるに従って大きさが第1画像処理領域より徐々に小さくなる第2画像処理領域を少なくとも1つ設定し、領域解像度設定部16で設定された画像処理領域から標示線を検出する。
(もっと読む)
ボトル缶のねじ部検査装置
【課題】ボトル缶のねじ部を正確かつ短時間で検査する。
【解決手段】ライナー付キャップを被嵌するために開口端を外方へ向かってカールさせたカール部1とカール部1の下方でキャップをねじ嵌合するねじ部2とからなる口金部3を有するボトル缶4を缶軸Xまわりに回転させながら、口金部3の一部を含むように設定された撮像エリアを撮像して口金部3におけるねじ部2の形状を検査する装置であって、ボトル缶4を保持して缶軸まわりに回転させる回転手段21と、撮像エリア内のボトル缶4のねじ部2に半径方向外方かつ缶軸方向下方から斜め上向きに照明光Aを照射するねじ部照明手段22と、撮像エリアにおける照明光Aの反射光A´を含む検査画像を連続的に取得する撮像手段24と、反射光A´の撮像結果に基づきねじ部2のねじ始まり部を検出し、ねじ始まり部を含むねじ部2の検査を行うねじ部検査手段25とを備える。
(もっと読む)
外観検査装置、外観検査プログラムおよび外観検査システム
【課題】物品の外観が、その物品の品目に応じた標準的な外観にどの程度類似しているかを容易に確認できるようにする。
【解決手段】第1の判定手段は、被検物データに対するオブジェクト認識処理により被検物の品目を1つまたは複数判定する。選択手段は、第1の判定手段により複数の品目が判定された場合に、それらのうちの1つをユーザ指示に応じて選択する。算出手段は、第1の判定手段により判定された1つの品目、または選択手段により選択された1つの品目に関連付けて記憶手段に記憶された標準データが表す外観に対して、撮像手段により得られた被検物データが表す外観が類似する度合いを表す数値を算出する。第2の判定手段は、算出手段により算出された数値と閾値との比較により被検物の外観の合否を判定する。
(もっと読む)
注視者検知装置
【課題】 対象物を注視する注視者数を正確に計測する。
【解決手段】 この発明に係る注視者検知装置は、画像データに映った人物の顔を検出し、顔情報データを生成する顔検出部と、この顔検出部が生成した顔情報データを記録する顔検出状況記録部と、所定の単位時間ごとに注視判定指示を発行する注視判定指示部と、この注視判定指示部が注視判定指示を発行したとき、前記顔検出状況記録部が記録する顔情報データの人物による注視時間を計測する注視判定部と、この注視判定部で計測された顔情報データの人物による注視時間を記録する注視時間記録部と、この注視時間記録部に記録された注視時間が注視規定時間を超えた顔情報データの人物を注視者として注視者数を集計する注視者数集計部とを備えた。
(もっと読む)
画像表示装置
【課題】画像表示装置において、撮像手段から所定距離以上離れた対象物を隠す(マスキング)ことで、画像を視る者が距離感を得る。
【解決手段】画像表示装置1は、動画像を撮像する撮像手段2と、撮像手段2により動画像を撮像した位置と動画像を構成する各画像上の対象物との距離が所定距離以上離れた対象物をマスキングする画像処理手段3と、画像処理手段3で処理をした動画像を表示する画像表示手段4とを備える。前記撮像手段は、ステレオ撮像手段であり、前記画像処理手段は、前記ステレオ撮像手段により撮像したステレオ画像を構成する第1のモノラル画像を複数のエリアに分割し、この第1のモノラル画像の各エリアに対して、第2のモノラル画像上で前記第1のモノラル画像上と同―位置にエリアを設定して、第1のパターンマッチング値と第2のパターンマッチング値とに基づいて画像上の対象物との距離を判定する。
(もっと読む)
画像処理装置、画像処理方法、コンピュータプログラム
【課題】 動画像から切り出した複数のフレーム静止画像を重ね合わせて一枚の静止画像を構成する際、フレームの中央は明るいが端に行くにつれ暗くなるといった画像内の明るさムラの影響で、構成後の静止画像の画質が低下してしまうこと。
【解決手段】 各フレーム静止画像内の注目画素から基準画素までの距離を計算し、それに応じて重ね合わせに用いるフレーム静止画像を、重ね合わせ平面上の画素ごとに切り替えて構成を行う。これによって、明るさムラの影響を受けにくいように各フレーム静止画像を重ね合わせることができ、構成後の静止画像の画質の低下を抑えることが可能になる。
(もっと読む)
81 - 100 / 1,739
[ Back to top ]