
Fターム[5B057DC03]の内容
Fターム[5B057DC03]に分類される特許
141 - 160 / 1,739
個人属性推定装置、個人属性推定方法及び個人属性推定システム
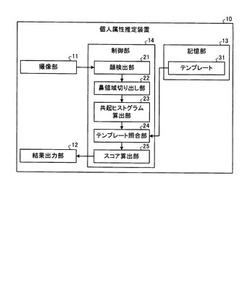
【課題】若年者を含む年齢を精度良く推定することができる個人属性推定装置、個人属性推定方法及び個人属性推定システムを提供することを課題とする。
【解決手段】撮像部11が撮像した画像から、顔検出部21が対象者の顔画像を検出し、鼻領域切り出し部22が顔画像から鼻を含む所定領域の画像を切り出す。共起ヒストグラム算出部23は、所定領域の画像における輝度の分布を共起ヒストグラムによって評価し、テンプレート照合部24が年齢層別に作成されたテンプレートと照合する。スコア算出部25がテンプレートとの照合結果から、最も一致度合いの高い年齢層を対象者の年齢層と推定する。
(もっと読む)
結束された鋼材束中の鋼材本数の計数方法及び計数装置

【課題】鋼材束中の鋼材本数をその断面の画像解析により計数する方法であって、断面画像に影の部分や輝度のバラツキがあっても、鋼材本数を誤差無く計数できる手段を提供する。
【解決手段】画像解析による計数と目視計数とを組合わせた計数方法。すなわち、画像解析で正常な鋼材断面像と確実に判断された部分のみを計数するとともにその部分の画像を消去し、未消去部分に残存する鋼材数を目視で計数する。95%以上の鋼材は画像解析で計数されるので、目視観測者の労力は著しく軽減され、かつ画像解析により計数ミスが生じることもない。
(もっと読む)
似顔絵作成装置、配置情報生成装置、配置情報生成方法、及びプログラム
【課題】本人の特徴を捉えた似顔絵を作成するためのパーツの配置情報を生成することのできる似顔絵作成装置、配置情報生成装置、配置情報生成方法、及びプログラムを提供する。
【解決手段】似顔絵作成装置10は、ユーザの顔画像を取得する画像取得部31と、上記顔画像中のパーツに関する特徴点の位置情報を取得する特徴点取得部33と、上記特徴点の位置情報を用いて、上記顔画像を上記複数のパーツ間の相対位置に基づいた顔タイプに分類する顔タイプ分類部35と、上記特徴点の位置情報に基づいた初期配置に対して、分類された上記顔タイプの示す特徴を強調する補正を加えた配置情報を生成する配置情報生成部37と、上記配置情報に基づいてパーツ画像を配置し、似顔絵画像を生成する似顔絵作成部39と、を有する。
(もっと読む)
情報処理装置、情報処理方法及びプログラム
【課題】本発明の課題は、簡易な方法で、画像内に存在する人物の性別、服装に関する情報を取得可能な技術を提供することである。
【解決手段】本発明の情報処理装置は、人物形状のひな形と、被服の種類ごとに用意された被服形状と、を格納する記憶部と、カメラを用いて撮像された画像内において検出されるエッジをひな形と照合して、エッジが、画像内に含まれる人物のエッジか否かを識別し、人物ごとに、画像内に含まれる人物のエッジと識別されたエッジを人物形状として取得し、人物形状から把握される、性別を推定可能な形状上の特徴に基づいて、人物形状に係る人物の性別を推定し、被服形状と人物形状とを照合することにより、人物形状に係る人物が着用している被服の種類を推定し、推定された性別及び被服の種類に基づいて、性別及び被服の種類別に、画像に含まれる人数を集計する制御部と、を備えることを特徴とする。
(もっと読む)
電子機器及びプログラム
【課題】画像内の被写体のサイズに対応した表示レンジを設定して、画像と図形とを重ね合わせて表示する。
【解決手段】関数電卓1は、表示部15と、所定の各基準物における少なくとも1つの特定部分と、当該特定部分の実長とを対応付けて記憶する基準物テーブル132と、複数の画像を記憶する記憶部13と、記憶部13により記憶された画像のうち、ユーザ操作に基づいて指定される指定画像を表示手段に表示させるCPU11とを備える。CPU11は、指定画像中の基準物における特定部分を検知して特定画像部分として設定し、複数の座標軸により定まる座標系を指定画像に重ねて設定するとともに、当該指定画像中の特定画像部分の実長に基づいて座標系の表示レンジを設定し、ユーザ操作に基づき指定画像に重ねて図形を表示させる。
(もっと読む)
画像測定装置、オートフォーカス制御方法及びオートフォーカス制御プログラム
【課題】高精度且つ高速なコントラスト式のオートフォーカスを実現する。
【解決手段】画像測定装置は、ワークを撮像してその画像情報を転送するカメラと、カメラの合焦位置を制御してこの合焦位置をZ軸方向の位置情報として出力する位置制御部と、画像情報及び位置情報に基づいてワークの画像測定を行う画像測定機とを備える。位置制御部は、カメラによるワークの撮像期間における所定のタイミングで、カメラ及び位置制御部のいずれか一方から他方に出力されるトリガ信号に基づき位置情報を取得保持し、画像測定機は、カメラから転送された画像情報及び位置制御部から出力された位置情報に基づき画像情報のZ軸方向の位置情報を算出し、算出された位置情報を用いてオートフォーカス制御を行う。
(もっと読む)
環境認識装置
【課題】信号機の矢印信号を的確に認識することが可能で、しかも、信号機が自車両から遠い位置にある段階から矢印信号を認識することが可能な環境認識装置を提供する。
【解決手段】環境認識装置1は、撮像手段2が撮像した画像Tに基づいて信号機Sの赤信号Lr等を検出する赤信号等検出手段12と、検出された赤信号Lr等の画像T中の位置に基づいて設定した探索領域Rs内に撮像されている矢印信号Aを抽出する矢印信号抽出手段13とを備え、矢印信号抽出手段13は、自車両MCから赤信号Lr等までの実空間上の距離Zに応じて矢印信号Aが指し示す方向を認識する手法を切り替え、自車両MCから遠い第一の所定区間Sec1内にある場合には画像T中における矢印信号Aと赤信号Lr等との相互の位置関係に基づいて矢印信号Aが指し示す方向を認識する。
(もっと読む)
撮像制御装置、テンプレート取得装置、及びプログラム
【課題】環境光を精度良く推定できる撮像制御装置及びプログラムを提供する。また、視点検出における成功率の個人差を少なくすることができるテンプレート取得装置及びプログラムを提供する。
【解決手段】制御装置70は、被写体を撮像する撮像部20の、奇数フィールドの撮像において光源10を発光させる。CPU71は、被写体に対する太陽光の方向を照明環境検知装置60の測定値に基づいて特定し、特定した太陽光の方向に基づき、光源10の発光時間を制御する。また、制御装置70のCPU71は、被写体である人物に対して、スピーカ50により複数回所定の指示を行い、指示ごとに撮像部20に撮像させ、撮像回数分の被写体画像を取得し、これらを比較することで、被写体画像における人物の特徴領域を検知し、特徴領域画像を取得する。CPU71は、特徴領域画像をテンプレートとして記憶手段に記憶させる。
(もっと読む)
画像形成装置
【課題】 安価で高速なエッジ判定処理を用いても、文字や図形の形状や方向に影響を受けることなく、良好にエッジ部のジャギーを改善することができるようにする。
【解決手段】 小さい文字は文字サイズ(ポイント数など)、細線は線幅を検出し、所定のサイズより小さい場合には、エッジ部だけでなくオブジェクト全体に対してエッジスムージングを実施する。
(もっと読む)
表情判定プログラムおよび表情判定装置
【課題】表情判定に用いる特徴点を高速に検出することを課題とする。
【解決手段】表情判定装置200は、顔部位検出部221、設定部222、特徴点検出部223および判定部224を有する。顔部位検出部221は顔画像から複数の顔部位を検出する。設定部222は、複数の顔部位の少なくとも一つを用いて口領域処理範囲を設定する。特徴点検出部223は、口領域処理範囲の画素分布に基づいて右口角および左口角を含む口領域を決定し、口領域から右口角および左口角の位置を検出する。判定部224は、口領域の縦横比率、口領域の面積および口領域における右口角の位置および左口角の位置に応じたポイントを付与することで被験者の表情を判定する。
(もっと読む)
医用画像処理装置、及び医用画像処理プログラム
【課題】腫瘍候補の癌化の同定の精度を向上させることが可能な医用画像処理装置を提供する。
【解決手段】実施形態の医用画像処理装置は、特定手段と、第1の演算手段と、第2の演算手段と、第3の演算手段とを有する。特定手段は、医用画像撮影装置によって被検体を撮影することで得られた医用画像データを受けて、この医用画像データから腫瘍候補を特定する。第1の演算手段は、特定された腫瘍候補の形態の特徴を示す形態情報をこの医用画像データに基づいて求める。第2の演算手段は、特定された腫瘍候補における血流動態を示す機能情報をこの医用画像データに基づいて求める。第3の演算手段は、形態情報と機能情報とに基づいて腫瘍候補の腫瘍の度合いを示す癌化特徴量を求める。
(もっと読む)
骨粗鬆症診断支援装置及び骨粗鬆症診断支援プログラム
【課題】高精度に皮質骨等の骨の厚みを測定できる骨粗鬆症診断支援装置及び骨粗鬆症診断支援プログラムを提供する。
【解決手段】骨粗鬆症診断支援装置1は、X線画像に帯状に写った皮質骨と他の部分との2本の境界線を特定する処理と、境界線上に設けた複数の点に基づいて、境界線に近似する直線または曲線である近似線を求める処理と、近似線上に複数の測定点を設定し、設定した測定点からそれぞれ近似線の法線方向に伸ばした測定補助線上において前記2本の境界線間の距離を測定し、複数の測定値を取得する処理と、測定値に基づいて皮質骨の厚みを算出する処理と、算出した皮質骨の厚みに基づいて骨粗鬆症を判別する処理と、を実行する制御部12を備える。
(もっと読む)
画像処理装置、画像処理装置の制御方法、距離計測装置、およびプログラム
【課題】パターン投影と簡便な画像処理で多重反射光領域の検出を行うことにより、多重反射によるノイズの影響を低減することを目的とする。
【解決手段】投影部によりエピポーララインと略平行な方向のラインパターンが投影された撮像対象物を撮像する撮像部と、撮像された画像からラインの方向を算出するライン方向算出部と、ラインの方向と、投影部と撮像部との相対的な位置関係を示す幾何配置に基づいて決定されるエピポーラライン方向との角度差に基づいて多重反射光領域を検出する検出部と、を備える。
(もっと読む)
テクスチャ評価装置、テクスチャ評価方法
【課題】対象物の表面において多数の凹凸が繰り返し形成された領域全体についての評価が可能なテクスチャ評価装置、テクスチャ評価方法を提供する。
【解決手段】テクスチャ評価装置1は、3次元計測部2と、3次元計測部2から計測データを入力する入力部3と、距離画像の生成などを行う演算部4と、評価結果を表示する表示部6とを備えている。3次元計測部2は、対象物10表面までの距離を計測し、計測した距離値を計測データとして入力部3に出力する。演算部4は、3次元計測部2から入力部3に入力された距離値を用いて、距離値を画素値とする距離画像を生成する距離画像生成部41を有している。さらに、演算部4は、距離画像の全体についてのテクスチャの凹凸の形状を表す測度の分布を求め、当該分布の統計量を特徴量として算出する特徴量算出部42と、算出された特徴量に基づいてテクスチャの評価を行う評価部43とを有している。
(もっと読む)
三次元形状計測装置、部品移載装置および三次元形状計測方法
【課題】ライン状(線状)の撮像領域を用いて移動する計測対象物の撮像を行う際にも、高輝度な照明光を用いることなく明るい画像を取得することが可能な三次元形状計測装置を提供する。
【解決手段】この表面実装機100は、各々がX1方向に並べられるとともにX1方向と直交するY2方向にライン状に延びるライン状撮像領域63a〜63fを含み、部品120を撮像する二次元イメージセンサ63と、二次元イメージセンサ63に対してX1方向に相対的に移動する部品120に向けて正弦波状の光強度分布を有するパターン光Gを投影する照明部61と、二次元イメージセンサ63が、ライン状撮像領域63a〜63fを用いて部品120の領域P1を順次撮像する場合に、領域P1の画像信号を、投影されたパターン光Gが有する周期Lの2分の1の積分範囲dで積算する制御を行う撮像制御部73とを備える。
(もっと読む)
三次元計測装置及び三次元計測方法
【課題】交点間隔を正しく求め、精度良く三次元計測を行える三次元計測装置及び方法を提供する。
【解決手段】明部と暗部を交互に配置する第1のパターン光と、前記第1のパターン光の位相をずらした第2のパターン光とを測定対象物に投影する投影手段と、第1または第2のパターン光が投影された測定対象物を撮像する撮像手段とを有する三次元計測装置は、撮像手段により得られた、第1及び第2のパターン光の画像データの階調値から、-階調値の交点位置を算出して三次元位置を計算する。ここで、パターン光の明部と暗部の繰り返しの周期を1周期とし、撮像手段が有する1画素が測定対象物面上において撮像する範囲を撮像間隔とし、投影されたパターン光の測定対象物面上での1周期の長さを撮像間隔のM倍としたときに、「2×N−0.2≦M≦2×N+0.2(ただし、Nは2以上の整数値)」を満たすように投影手段と撮像手段が配置されている。
(もっと読む)
距離情報符号化方法,復号方法,符号化装置,復号装置,符号化プログラムおよび復号プログラム
【課題】カメラから被写体までの距離を表す距離情報を効率的に符号化する。
【解決手段】三次元点復元部1021で,カメラから被写体までの距離を符号化対象の距離の基準となっているカメラの位置や向きによらない三次元位置を表す値に変換し,変換距離情報計算部1022で,その三次元位置をその座標値の表す点から予め定められた三次元空間上の数直線に下ろした足に対する値へ変換し,変換距離情報量子化部1023で,その値を量子化する。その量子化された値を距離情報符号化部103で符号化する。
(もっと読む)
3次元形状測定装置、3次元形状測定方法及びプログラム
【課題】複数のカメラ間やカメラとプロジェクタ間での煩雑なキャリブレーションを行うことなく、輝度変化が複雑な被写体においても簡便に被写体の3次元形状を測定する。
【解決手段】露光制御部110は、被写体102と撮像素子104との相対位置を変化させながら、所定の時系列パターンで撮像素子104への露光及び遮光を切り替えて撮像素子104に被写体102を撮像させる。ブレ検出部106は、撮像素子104により撮像された被写体102の画像データ内のブレを検出する。奥行き計算部107は、検出されたブレに基づいて、被写体102の3次元形状を測定する。
(もっと読む)
書画カメラ、書画カメラの制御方法、プログラムおよび表示処理システム
【課題】3次元画像を表示させることのできる書画カメラ、書画カメラの制御方法、プログラムおよび表示処理システムを提供する。
【解決手段】表示装置(プロジェクター10)に接続されて用いられる書画カメラ1であって、複数の撮像部(カメラ2,3)と、複数の撮像部のうち、2つの撮像部により同一の撮像対象を異なる撮像位置から撮像した2つの画像データを生成する画像処理部14と、表示装置により表示される2つの画像データの画像間距離を決定するためのパラメータを取得するパラメータ取得部(カメラ位置取得部16)と、表示装置に対して、2つの画像データ、並びにパラメータまたは画像間距離を出力する出力部15と、を備えたことを特徴とする。
(もっと読む)
検査装置における良品判定基準設定方法及び良品判定基準設定装置
【課題】検査対象物について検査装置を用いて得た検査計量値を基に検査対象物の良否を判定する検査装置において、検査対象物が良品であるか不良品であるかを判定する良品判定基準を設定する良品判定基準設定方法。
【解決手段】複数の良品について検査装置を用いて得た良品計量値の分布と、複数の不良品について検査装置を用いて得た不良品計量値の分布とを求め、前記良品計量値の分布と、前記不良品計量値の分布とを、横軸を検出画素数、縦軸をサンプル数として同一の画面上に表示し、当該同一の画面上において両者を比較して、上限の良品判定基準を、前記良品計量値の分布において上限側における不良品計量値の分布の下限より小さなものに設定し、下限の良品判定基準を、下限側における不良品計量値の分布の上限より大きなものに設定する。
(もっと読む)
141 - 160 / 1,739
[ Back to top ]