
Fターム[5B057DC03]の内容
Fターム[5B057DC03]に分類される特許
61 - 80 / 1,739
画像処理装置および方法、画像処理システム、並びにプログラム
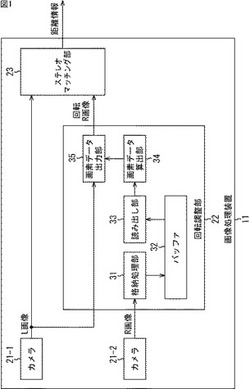
【課題】複数のカメラにより得られる複数の画像の相対的な位置の調整を、経年変化の影響を受けることなく、低コストかつ低レイテンシで行う。
【解決手段】格納処理部は、基準となる基準画像に対して被写体が所定の角度の分ずれている入力画像の画素の画素データをバッファに格納し、読み出し部は、角度の分だけ回転させた場合の入力画像において基準画像に対応する対応領域にある、入力画像の画素の画素データを、バッファから読み出し、画素データ算出部は、読み出し部によって読み出された画素データに基づいて、入力画像を角度の分だけ回転させた回転画像の画素の画素データを算出する。本技術は、例えば、ステレオカメラを備える画像処理システムに適用することができる。
(もっと読む)
画像処理装置、画像形成装置およびプログラム

【課題】エッジ幅によって異なる階調特性の差による弊害を防ぐ。
【解決手段】エッジ判定部521は、入力された画像データを構成する各画素に対してエッジを構成する画素であるか否かを判定することにより、エッジ部の画素を検出する。また、エッジ判定部521は、検出されたエッジ部の画素について、そのエッジ部の幅であるエッジ幅を検出する。エッジ階調補正部522は、エッジ判定部521におけるエッジ幅検出処理により検出されたエッジ幅が4ドット以下の場合、検出されたエッジ幅に基づいて異なる階調補正を行う。ここでエッジ階調補正部522は、エッジ幅が狭いと判定された画素の濃度値が、エッジ幅が広いと判定された画素の濃度値よりも大きくなるような階調補正を行う。
(もっと読む)
車両運転支援装置、車両が走行する道路の路肩を検出する方法および該方法に基づく車両運転支援方法
【課題】本発明は、楕円偏光が優勢な実際の道路環境においても正確に路肩を検出することができる新規な車両運転支援装置を提供することを目的とする。
【解決手段】車両の車軸方向(または車両の高さ方向)に2つの偏光カメラを配置して偏光画像撮像系を構築した上で、車軸方向の偏光成分の光強度(H)および当該車両の高さ方向の偏光成分の光強度(V)から算出される偏光状態特徴量を、画像において対をなす画素毎に比較し、その差分が所定の閾値を超える場合に、これを路肩として検出する。検出された路肩の位置情報に基づいて、操舵制御手段、走行速度制御手段および警告手段等を制御することによって車両の運転支援を行う。
(もっと読む)
顔画像検出装置
【課題】乗員の顔面に向けて投光された光のちらつきを抑え、ひいては運転者の眼鏡への周囲の風景の写り込みを防止することが可能な顔画像検出装置を提供する。
【解決手段】車両の乗員の顔面を含む領域に向けて投光する投光器と、乗員の顔面を含む予め定められた領域を撮像する際に、撮像条件を設定する撮像制御部と、撮像制御部の設定した撮像条件に基づいて、乗員の顔面を含む予め定められた領域を撮像する撮像部と、車両または乗員に照射される環境光を検出する環境光検出部と、検出した環境光の光量が予め定められた光量閾値を上回るときの動作モードと、光量閾値を下回るときの動作モードの少なくとも2つのモードのいずれかを判定する動作モード判定部と、動作モードに基づき、投光器の光源の発光パターンを設定する発光パターン設定部と、発光パターンに基づいて、光源を発光させるよう投光器を制御する投光器制御部と、を備える。
(もっと読む)
眼球検出システムおよび眼球検出方法
【課題】ロバスト性が高く正確に対象者の眼球を検出可能な眼球検出システムを提供する。
【解決手段】本発明に係る眼球検出システム100は、ターゲット画像上での中心座標および拡大倍率を含む染色体を持つ個体の集団を生成する初期個体集団生成部120と、テンプレート画像180上の画素値と中心座標および拡大倍率によって指定されるターゲット画像上の画素値とに基づいて個体それぞれの適応度を算出する適応度演算部122と、中心座標および拡大倍率によって指定されるターゲット画像上の対象者の眼球領域198を基準として前額領域190、眉毛領域192、上眼瞼領域194または頬領域196を仮定する領域仮定部124と、これらの領域に基づいて適応度を修正した修正適応度を算出する修正適応度演算部126と、修正適応度に基づき遺伝的操作を実行する遺伝的操作実行部130と、を備えることを特徴とする。
(もっと読む)
鉄筋規格判別装置及び鉄筋規格情報作成装置
【課題】簡単に精度よく鉄筋の配筋情報を取得する。
【解決手段】携帯端末4は、鉄筋の画像から、背景板Bに対して垂直方向の1ピクセルずつの位置に対応する連続的な径長を抽出する(S1001)。次に、抽出した鉄筋径分布の全データのうち、上部5%のデータと、下部5%のデータとをノイズとして除去する(S1002)。そして、中央部90%のデータにおける最大値を特定し、最大径d1として取得する(S1003)。続いて、鉄筋規格情報452を参照し(S1004)、最大径d1に対応する鉄筋規格を特定できるか否かを判定する(S1005)。鉄筋規格を特定できる場合には(S1005のYES)、該当した鉄筋規格を取得する(S1006)。該当する鉄筋規格を特定できない場合には(S1005のNO)、その旨をオペレータに通知することにより、角度を変えて鉄筋を再度撮影し、画像を抽出し(S1007)、S1001の処理から再試行する。
(もっと読む)
撮像装置、その制御方法、および制御プログラム
【課題】人物などの被写体の顔領域の検出が困難な状況においても逆光シーンであるか否かを判別する。
【解決手段】ブロック分割部102は画像データが示す画像を複数のブロック領域に分割する。ブロック特徴量決定部103は複数のブロック領域の各々について画像データに基づいてその特徴量を決定する。グルーピング部104は特徴量に応じて複数ブロックの各々をグループ化する。被写体・背景評価値決定部105は画像データに応じてグループ毎に当該グループの被写体らしさを表す被写体評価値と当該グループの背景らしさを表す背景評価値を求める。シーン判別部106は被写体評価値および背景評価値に応じて画像データを得た撮影シーンが逆光シーンであるか否かを判別する。
(もっと読む)
車両検出装置
【課題】複数の映像間で対応をとる特徴点を定めて位置合わせ基準を鮮明にでき、車両の検出精度を向上させる。
【解決手段】実施形態の車両検出装置は、線分成分抽出手段、多角形近似手段及び計測手段を備えている。前記線分成分抽出手段は、左右の撮影画像毎に、当該撮影画像に含まれる前記車両のフロントガラス領域と車体との境界を示す複数の線分成分を抽出する。前記多角形近似手段は、前記左右の撮影画像毎に、当該抽出された複数の線分成分の幾つかを用いて閉ループを構成する多角形近似を行う。前記計測手段は、前記左右の撮影画像毎に前記閉ループを構成する線分成分を当該左右の撮影画像間で互いに位置合わせし、当該位置合わせした線分成分間の座標情報と、左右の撮影画像を撮影した撮影位置を示す撮影位置情報とに基づいて、前記閉ループの位置を前記車両の位置として計測する。
(もっと読む)
目視対象物判定装置、目視対象物判定方法および目視対象物判定プログラム
【課題】目視者の目視する対象物を正確に判定すること。
【解決手段】目視者1の画像データを基にして、目視者1の視線1aを検出し、視線1aの先の視点位置1bを算出する。目視対象物判定装置100は、表示装置10に表示される対象物10A〜10Cの特徴を取得する。目視対象物判定装置100は、目視者の視点位置1bおよび対象物10A〜10Cの距離と、各対象物10A〜10Cの特徴とを基にして、各対象物が目視者に目視されているか否かを判定する。
(もっと読む)
画像計測装置及びコンピュータプログラム
【課題】計測結果が計測対象物のどの部分のどの計測結果であるのかを使用者が的確に把握することができる画像計測装置及びコンピュータプログラムを提供する。
【解決手段】撮像手段で取得した計測対象物の画像を表示し、表示された画像上で特徴画像、及び計測位置の指定を受け付ける。指定を受け付けた特徴画像と、計測位置及び該計測位置を示す寸法線の表示位置を表す、特徴画像に対する相対位置に関する情報とを記憶しておく。新たに取得した計測対象物の画像と記憶してある特徴画像とを照合し、計測対象物の画像の姿勢及び位置に関する情報を特定する。姿勢及び位置が特定された計測対象物の画像に対して計測位置を設定し、該計測位置のエッジ部分を検出して、所定の物理量を計測する。記憶された寸法線を表示する特徴画像に対する相対位置に関する情報に基づいて、計測位置を示す寸法線及び計測結果を所定の位置に表示する。
(もっと読む)
停止線検出システム、停止線検出装置、停止線検出方法及びコンピュータプログラム
【課題】路面に形成された停止線を適切に検出することを可能にした停止線検出システム、停止線検出装置、停止線検出方法及びコンピュータプログラムを提供する。
【解決手段】停止線を認識対象とした高精度ロケーションシステムを用いて、停止線の候補となる地物(停止線候補)を検出した場合に、進行方向別通行区分の路面標示よりも進行方向側に停止線候補の路面標示を検出し、且つ最も分岐点側にある進行方向別通行区分の路面標示から車両の進行方向の所定距離以内に停止線候補の路面標示を検出した場合に、該停止線候補を停止線と特定するように構成する。
(もっと読む)
ライト検出装置、ライト検出プログラム、およびライト制御装置
【課題】撮像画像中から他車両のライトを検出するライト検出装置において、車両のライトに類似する特徴を有する光源を識別し、車両のライトを良好に検出する。
【解決手段】ライト制御システム1においては、自車両の周囲を撮像した撮像画像を取得し(S110)、撮像画像中の光源を抽出する(S120)。そして撮像画像中を複数に区分した領域毎に他車両が存在する確度が設定された領域確度マップに基づいて、該光源毎に光源が他車両のライトである確度を表す領域確度を演算する(S150)。また各光源における形状を含む特徴量が車両のライトが有する特徴量と一致する確度に応じて、各光源が他車両のライトである確度を表す特徴確度を演算し(S150)、各光源に対して領域確度および特徴確度に基づく最終確度を演算し、予め設定された閾値以上となる最終確度を有する光源が他車両のライトである旨を出力する(S150,S190)。
(もっと読む)
停止線検出システム、停止線検出装置、停止線検出方法及びコンピュータプログラム
【課題】路面に形成された停止線を適切に検出することを可能にした停止線検出システム、停止線検出装置、停止線検出方法及びコンピュータプログラムを提供する。
【解決手段】停止線を認識対象とした高精度ロケーションシステムを用いて、停止線の候補となる地物(停止線候補)を検出した場合に、車両の走行する道路の路面色が変更した変更地点よりも進行方向側に停止線候補の路面標示を検出し、且つ該変更地点から車両の進行方向の所定距離以内に停止線候補の路面標示を検出した場合に、該停止線候補を停止線と特定するように構成する。
(もっと読む)
画像処理装置、画像形成装置およびプログラム
【課題】スクリーン処理が施された二値の画像データにおける連続したオン画素により構成される設定された幅以下の細線であるオン画素細線および連続したオフ画素により構成される設定された幅以下の細線であるオフ画素細線を、本構成を有していない場合と比較して正確に判定する。
【解決手段】
ポジ細線判定部41は、二値の入力画像データの各画素について、オン画素かつ左右方向または上下方向に連続するオン画素の数が予め設定された数以下かつ判定領域内のオン画素数が第1の閾値以上である画素をポジ細線の画素と判定する。ネガ細線判定部42は、二値の入力画像データの各画素について、オフ画素かつ左右方向または上下方向に連続するオフ画素の数が予め設定された数以下かつ判定領域内のオン画素数が第2の閾値以上かつ判定領域内のオフ画素数が第3の閾値以上である画素をネガ細線の画素と判定する。
(もっと読む)
対象物検出装置、撮像装置及び画像処理プログラム
【課題】画像内から顔を検出する際の過検出を抑制すること。
【解決手段】ユーザが被写体登録用に撮像をする際に顔検出処理部22により画像から顔検出を行い、検出された顔のサイズ、撮像装置10から被写体までの距離、及び撮像時のズーム倍率を記憶しておき、本撮像モードにおいては、撮像装置10から被写体までの距離及びズーム倍率と登録時に記憶された情報とより推定顔サイズ算出部26にて画像上の推定顔サイズを算出し、顔サイズ比較部28にて、この推定顔サイズと該本撮像モードにおいて顔検出処理部22による顔検出で検出された顔領域のサイズとを比較し、両者がほぼ一致した場合に、顔領域決定部30が該本撮像モードにおいて顔検出処理部22による顔検出で検出された顔領域を顔領域として決定することで、過検出を抑制する。
(もっと読む)
移動体検出装置、移動体検出システム及びコンピュータプログラム
【課題】従来よりもさらに精度良く移動体を検出することができる移動体検出装置、移動体検出システム及びコンピュータプログラムを提供する。
【解決手段】鳥瞰画像生成部103は、透視変換行列を用いて撮像画像を複数の画素で構成される鳥瞰画像に変換する。移動体候補領域抽出部104は、鳥瞰画像の画素値に基づいて、鳥瞰画像上で移動体候補領域を抽出する。移動体検出部107は、抽出された移動体候補領域の境界の近傍で列状をなす列状画素それぞれの位置から所定の向きで走査した所定数の画素のうち、移動体候補領域内に含まれる画素数に基づいて、列状画素を移動体の一部として検出する。
(もっと読む)
物体管理システム、物体管理方法およびプログラム
【課題】特定された固有の物体同士についての接触の可否を、撮像範囲内における接触していない物体や人物を考慮した上で判定することができる物体管理システムを提供する。
【解決手段】画像内の物体を検出する画像認識部114と、各物体の識別子および各物体に対する接触が許可されている他の物体の識別子を検出する物体データ記録部115と、各物体間の距離を検出する距離検出部116と、前記各識別子および距離を用いて許可されていない物体の接触を判定する接触可否判定部117と、を備えている。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】静止画の場合でも主要被写体を際立たせるように画像処理すること。
【解決手段】画像処理装置50は、互いに視差を含む2画像をそれぞれ同数の複数領域に分割する分割部と、2画像間の類似度を分割部により分割される分割領域ごとに演算する類似度演算部と、所定の画像処理を行う画像処理部と、2画像の少なくとも一方に対して施される画像処理部による画像処理の編集度合いを、分割領域における類似度に基づいて変化させるように画像処理部を制御する制御部と、を備える。
(もっと読む)
車両監視装置
【課題】車両監視装置の設置および設置後の位置調整を簡易に行うことのできる車両監視装置を提供する。
【解決手段】走行する車両を監視カメラで撮影し、撮影した画像を解析して前記車両の登録番号あるいは車色を取得する車両監視装置において、前記画像のエッジを検出し、該エッジの傾きから前記監視カメラの傾きを検出する傾き検出部と、前記画像内のナンバープレートの幅を認識し、該認識した幅と前記画像の幅をもとに前記カメラの視野幅を検出する視野幅検出部を備えた画像処理装置を備え、該画像処理装置は、検出した監視カメラの傾きおよび視野幅をもとに、前記監視カメラの傾き、およびカメラと監視対象車両位置との間隔の適否を判定し、否と判定したときその調整方向を指示する情報を表示装置に表示する判定部を備えた。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】人物の画像で跳ねた髪などを目立たなくすること。
【解決手段】画像処理装置は、画像から人物の顔を検出する顔検出処理を行う顔検出処理部13と、顔検出処理の結果に基づいて、画像内における、顔部分を含む所定のエリアを顔エリアとして決定する顔エリア決定部13と、顔エリアの外周を含む所定のエリアを髪エリアとして決定する髪エリア決定部13と、髪エリア内の画像に基づいて、頭部の輪郭を示す頭部ラインを決定する頭部ライン決定部13と、髪エリア内の画像において、頭部ラインに対して顔エリアの反対側に存在する髪の毛部を補正する補正処理を行う補正処理部12、13と、を備えることを特徴とする。
(もっと読む)
61 - 80 / 1,739
[ Back to top ]