
Fターム[5B057DC03]の内容
Fターム[5B057DC03]に分類される特許
41 - 60 / 1,739
吸収性物品に係るシール部の検査装置、及び検査方法
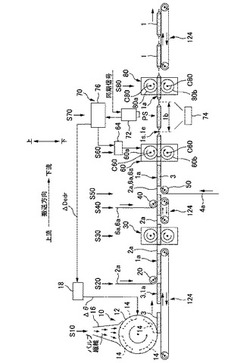
【課題】生理用ナプキン等の吸収性物品に係るシール部の穴あき異常や接合異常を正確に検査可能な検査装置及び検査方法を提供する。
【解決手段】吸収性物品の外縁部において接合するシール部1Sの検査装置70である。前記シール部が形成された領域を撮像して平面画像データとして生成する撮像処理部と、平面画像における前記シール部の撮像部分のうちで、厚み方向に貫通状態の穴あき部分が撮像されている領域が含まれるように二値化処理を行う第1二値化処理部と、前記二値化画像において二値のうちの一方の値によって特定される画像に、接合異常部分が撮像されている領域が含まれるように二値化処理を行う第2二値化処理部と、前記第1二値化処理部で生成された二値化画像に基づいて、穴あき異常の有無の判定を行う第1異常判定処理部と、前記第2二値化処理部で生成された二値化画像に基づいて、接合異常の有無の判定を行う第2異常判定処理部と、を有する。
(もっと読む)
3次元座標位置推定装置、その方法、そのプログラムおよび3次元座標推定システム、ならびに、カメラ較正情報生成装置

【課題】マーカを複数のカメラで撮影したそれぞれの画像からマーカの3次元座標位置を推定する3次元座標位置推定装置を提供する。
【解決手段】3次元座標位置推定装置1は、少なくとも30台以上のカメラによって撮影されたカメラ画像を入力する画像入力手段11と、カメラごとに、カメラ画像からマーカの2次元座標位置を検出する点光源(マーカ)検出手段12と、カメラパラメータに基づいて、全カメラ共通の座標系において、カメラごとに、点光源(マーカ)検出手段12で検出された2次元座標位置と、当該カメラの光学中心とを結ぶ直線式を算出する点光源(マーカ)方向算出手段13と、カメラごとの直線式との距離の総和が最小となる位置を、マーカの3次元座標位置として算出する距離最小位置算出手段14と、を備えることを特徴とする。
(もっと読む)
監視装置、プログラム
【課題】ベッドを基準にして監視すべき領域を自動的に検出することにより、監視対象の人の動作を正確かつ再現性よく検出することを可能にした監視装置を提供する。
【解決手段】距離画像センサ10は、画素値が物体までの距離値である距離画像を生成する。距離画像センサ10の視野領域には、監視対象であるベッドの全体を含む。ベッド認識部21は、距離画像センサ10が出力した距離画像を用いてベッドの位置を抽出する。人認識部22は、距離画像センサ10が出力した距離画像のうちベッド認識部21により認識したベッドの範囲内と範囲外とにおいて人が占有する領域を検出する。行動判定部23は、ベッド認識部21により検出したベッドと人認識部22により検出した人の領域との組み合わせによりベッドに対する人の動作を判別する。
(もっと読む)
部品ライブラリデータの作成方法
【課題】電子部品の厚さに係るデータを作成すべく電子部品を撮像するに際し、自動的に明るさを設定するようにして、明るさ設定作業効率の向上を図ること。
【解決手段】光源の明るさを変えて調整台上の電子部品を部品認識カメラが複数回撮像し、この各撮像画像の評価エリアを設定して、各撮像画像の前記評価エリア内の各画素の輝度の平均値、標準偏差σ、最大値を算出し、全ての前記撮像画像において、適切な高さ画像を得るための明るさに関する判定式を満足するかを判定する。満足しないと判定した場合に、評価エリア全体が輝度の飽和状態の明るさに設定して、この明るさの第1の所定の割合の明るさで第1の画像を取得し、飽和に達した直前の明るさの第2の所定割合の明るさで第2の画像を取得し、前記第1の画像及び前記第2の画像を合成した画像を取得し、この合成画像を認識処理装置が認識処理して、前記電子部品の厚さに係るデータを作成する。
(もっと読む)
車載カメラ用画像補正方法および車載カメラ用画像補正プログラム
【課題】形状や寸法が既知の図形を用いることなく車載カメラの現在の取り付け角度を求めることができる車載カメラ用画像補正方法および車載カメラ用画像補正プログラムを提供する。
【解決手段】車載カメラ用画像補正方法は、車両に取り付けられたカメラが車両の周囲を撮像するステップS1と、カメラにより撮像された画像内の路面画像にもとづいて動きベクトルを検出するステップS5と、検出された動きベクトルを、真上視点の動きベクトルとなるように車両の進行方向軸、路面法線方向軸ならびに進行方向軸および路面法線方向軸に直交する路面平行方向軸の3軸の各軸周りに独立に回転補正させるための式である真上視点の動きベクトルへの変換式を作成するステップS6と、真上視点の動きベクトルへの変換式からカメラの車両に対する取り付け角度を求めるステップS7と、を有する。
(もっと読む)
停止線検出システム、停止線検出装置、停止線検出方法及びコンピュータプログラム
【課題】路面に形成された停止線を適切に検出することを可能にした停止線検出システム、停止線検出装置、停止線検出方法及びコンピュータプログラムを提供する。
【解決手段】停止線を認識対象とした高精度ロケーションシステムを用いて、停止線の候補となる地物(停止線候補)を検出した場合に、停止線候補が道路幅方向に対して所定長さ未満の形状を有する複数の線分から構成され、車両から複数の線分までの各距離が等距離であり、且つ複数の線分の内で道路幅方向の両端に位置する2つの線分の外側端部間の長さが所定長さ以上であると判定された場合に、該停止線候補を停止線として検出するように構成する。
(もっと読む)
データ構造、コンピュータプログラム、及びデータ取得装置
【課題】一般的な3次元画像データ作成ソフトウェアを用いた場合であっても、3次元画像データにシミュレーション対象の識別データを付与することを可能としつつ、データ形式の変換に伴う識別データの欠損を抑制する。
【解決手段】部品データ20は、シミュレーション装置10において、生産ラインのシミュレーションに用いられる。部品データ20は、部品の3次元画像を特定する部品形状データ21と、部品を識別するデータである部品識別データ23と、を備えている。部品識別データ23は、部品の3次元画像に対して描かれるQRコード画像のデータとして指定されている。
(もっと読む)
シワ検出方法、シワ検出装置およびシワ検出プログラム、並びに、シワ評価方法、シワ評価装置およびシワ評価プログラム
【課題】被験者の顔を撮影した画像からシワを検出する際に誤検出を低減することができるシワ検出方法を提供する。
【解決手段】被験者の顔データを取得し、取得された顔データの所定の部位に解析領域を設定し、設定された解析領域に対して、顔の所定の部位毎に予め設定されたシワの延びやすい角度範囲内の一方向若しくは互いに異なる複数の角度で延びるシワ成分をそれぞれ抽出した複数のシワ成分抽出データを生成し、複数のシワ成分抽出データのそれぞれに対してシワ成分を強調した複数のシワ成分強調データを生成し、複数のシワ成分強調データを互いに合成した合成データを生成し、合成データにおいて所定の閾値以上の強度を有するシワ成分を被験者のシワとして検出する。
(もっと読む)
画像処理装置、画像処理方法およびプログラム
【課題】撮像画像の適切な位置にオブジェクトを合成することが可能な、新規かつ改良された画像処理装置、画像処理方法およびプログラムを提案する。
【解決手段】原点座標が設定されたオブジェクトを、前記原点座標が撮像画像に含まれる顔領域の位置に応じた合成基準座標に合うように前記撮像画像に合成する画像合成部、を備える、画像処理装置が提供される。
(もっと読む)
ステレオマッチング処理装置、ステレオマッチング処理方法、及び、プログラム
【課題】ステレオ画像から、同一の点を撮像している対応点を求めて、視差を算出する際において、処理の高速化を図り得る、ステレオマッチング処理装置、ステレオマッチング処理方法、及び、プログラムを提供する。
【解決手段】ステレオマッチング処理装置100は、ステレオ画像の互いに対応点の組を特定し、組毎に視差を算出する視差算出部30と、ステレオ画像を分割する画像分割部40と、分割部分毎に、当該部分中に存在する対応点の組を特定し、これについて算出された視差の値に基づいて、当該部分の視差の最大値と最小値とを特定して視差探索範囲を設定する視差探索範囲設定部50と、分割部分毎に、対応点の組を新たに複数特定し、新たに特定した各組について、視差を算出し、その値が当該部分の視差探索範囲に収まる場合に、算出した視差を、当該部分における新たに特定した当該組の視差として出力する視差算出部60と、を備えている。
(もっと読む)
画像解析装置および画像評価装置
【課題】人物とその地点を代表するランドマークのようなオブジェクトとが被写体となるような撮影画像を解析してオブジェクトの位置を識別する。
【解決手段】オブジェクト探索領域抽出部303は、画像データから顔領域および胴体領域を除いてオブジェクト探索領域を抽出する。顕著領域候補抽出部304は、オブジェクト探索領域から複数の顕著領域候補を抽出する。独自色性算出部305は、オブジェクト探索領域の各画素の色情報を識別し、各色の独自色性を、その出現頻度および他の色との距離に基づいて定量的に算出する。存在確率算出部307は、オブジェクト領域の存在確率をブロック単位で算出する。オブジェクト領域識別部308は、各顕著領域候補の顕著領域としての尤度を算出し、最尤の顕著領域候補をオブジェクト領域に決定する。
(もっと読む)
検査装置、検査方法及び検査プログラム
【課題】検査対象毎に検査パラメータを設定する必要がなく、半田付けの実装の良否を適切に判定すること。
【解決手段】複数の半田接合部を含む画像から、半田接合部を含む部分画像を複数抽出する抽出部と、抽出部により抽出された複数の部分画像を用いて、半田接合部の実装の良否を判定する基準となる基準画像を作成する作成部と、作成部により作成された基準画像と各部分画像とを比較する比較部と、比較部による比較結果に基づき、各半田接合部の実装の良否を判定する判定部と、を備える。
(もっと読む)
画像処理装置、および、画像処理装置の制御方法ならびに当該方法をコンピュータに実行させるためのプログラム
【課題】奥行きに基づいて画像を正確に分類する画像処理装置を提供する。
【解決手段】画像取得部が画像を取得する。奥行き取得部が、画像内の画素に対応付けて奥行きを取得する。顔検出部が、画像において顔領域を検出する。顔検出距離選択部が、検出された領域内の画素に対応する奥行きを顔検出距離として選択する。極大距離選択部が、奥行きの度数の分布において度数が極大となる奥行きを極大距離として選択する。画像分類部が、顔検出距離の値と極大距離の値との近さの程度が所定値より大きいか否かにより画像が人物画像であるか否かを判断する。
(もっと読む)
データ解析装置、データ解析方法、及びプログラム
【課題】電柱などの円柱形状の地物を高精度に自動的に検出する。
【解決手段】部分空間設定手段20は対象空間を垂直面で分割して、柱状の複数の部分空間を設定する。部分空間選択手段22は部分空間のうち目的地物の高さに応じて予め設定された閾値以上の高さにまで点群が分布するものを注目部分空間として選択する。壁面探索手段26は注目部分空間の水平面内における線分のうち、当該水平面に射影された点群が予め設定した基準以上に近傍に集まる点群集中線分を探索し、当該点群集中線分を地物の壁面の水平面内での位置と推定する。円柱面探索手段28は点群のうち壁面に対応するものを除いた残余点群を求め、水平面内での当該残余点群の分布に基づいて、目的地物の円柱面の位置を探索する。
(もっと読む)
視線測定のための方法及び装置
【課題】フラッシュ撮影時の赤目補正を、画像取得時の条件や人間の目の生理的変化の影響による誤判定を排除して行う。
【解決手段】画像取得時に周辺光の光量を示す値を検知すること、前記値を前記画像に関連付けて格納すること、前記値について、前記値を閾値と比較すること、及び、前記画像を分析してフラッシュ目欠陥候補を識別することを含む行動方針を適用するための前提条件としての閾値よりも前記値が低いことを判定すること、の少なくとも一部に基づいて、行動方針を適用するか否かを決定すること、を含む方法を遂行するようにプロセッサーをプログラミングするために埋め込まれたコードを有するプロセッサー読込み可能な一または複数の媒体を提供する。
(もっと読む)
画像処理装置及びカメラ
【課題】画像処理によって生じる不自然さを抑制しつつ、人物の顔の印象を積極的に改善する画像補正を実施可能な画像処理装置等を提供する。
【解決手段】デジタル画像から、人物の目が写っている領域である目領域を抽出する目抽出部44と、前記目領域に対して、黒目の白目に対する比率が大きくなるように、前記目領域に補正処理を実施する色補正処理部70と、強膜領域を抽出する第1領域抽出部50と、瞳孔及び虹彩を抽出する第2領域抽出部60と、境界を縁取りする形状を有する補正予定領域を算出する補正領域算出部66と、色補正処理部を有する画像処理装置。
(もっと読む)
赤外線センサを用いた運転者状態監視装置及びその方法
【課題】赤外線LED及びカメラを用いて運転者状態を確認することにより、カメラ又は運転姿勢に従い発生することのある認識誤謬を低減できる運転者状態監視装置を提供する。
【解決手段】光信号を発光する発光部101及び前記光信号を受光する受光部103を含み、発光部101から発光される光信号と、受光部103により受光される光信号の位相差を用いて、正面の運転者までの距離を測定する赤外線センサ100、運転者の顔を撮影し、撮影された映像で運転者の顔を検出する顔認識カメラ110、及び赤外線センサ100及び顔認識カメラ110を介して測定されたデータを用いて認識誤謬が発生したのかの可否を判別し、認識誤謬が発生した場合、発生した認識誤謬を分析する電子制御部120を含み、運転者が正常状態か、不注意、眠気などの不注意状態かを確認する。
(もっと読む)
画像評価装置、撮像装置およびプログラム
【課題】 簡易な操作で画像の評価にユーザの嗜好を反映させる。
【解決手段】 画像評価装置の画像評価部は、各々の候補画像から特徴量を抽出するとともに、特徴量を変数とする評価式を用いて複数の候補画像のうちから代表画像を選出する。表示処理部は、代表画像および複数の候補画像を表示装置に表示させる。入力部は、候補画像のうちから最適画像の指定を受け付ける。学習処理部は、代表画像の選出後に最適画像の指定があったときに、最適画像が代表画像として選出されるように評価式を調整する。
(もっと読む)
自車位置認識システム、自車位置認識プログラム、及び自車位置認識方法
【課題】複数の地物で構成された地物群について、画像認識処理における認識対象を決定するための認識率を適切に決定することが可能な技術を実現する。
【解決手段】画像認識処理を行う範囲として認識地物単位毎に設定される認識要求範囲を取得する認識要求範囲取得部27と、地物の種別毎に予め定められた予想認識率ERに基づき認識地物単位毎に認識率を決定する認識率決定部26と、認識要求範囲が互いに重複する複数の認識地物単位の中から認識率に基づき認識対象とする認識地物単位を選択する認識対象選択部25とを備え、認識率決定部26は、道路長さ方向に分かれて配置された地物群からなる特定認識地物単位について、各時点での各地物の画像認識結果に応じて、当該特定認識地物単位を構成する複数の地物の一部が画像認識された場合には当該特定認識地物単位を構成する残りの地物の予想認識率ERに基づき認識率を決定する。
(もっと読む)
車両周辺監視装置
【課題】ピッチ検出器を用いることなく、単眼カメラによる構成においてもピッチング補正を行うことができる機能を備えた車両周辺監視装置を提供する。
【解決手段】車両周辺監視装置は、所定の制御周期毎に、車両に搭載されたカメラによる撮像画像を取得し、今回の制御周期での撮像画像の前回の制御周期からの変位量を算出し、該変位量を用いて車両の挙動に起因する撮像画像の変位分を相殺するためのピッチング補正値を算出し、今回の撮像画像に対して、ピッチング補正値による補正を行った補正画像を生成し、補正画像から対象物を検出する。変位量は、撮像画像から、地平線より上側の所定領域、地平線を含み地平線より下側から上側までの所定領域、又は自車両から所定距離内の先行車両を含む所定領域を監視領域として切出し、今回の制御周期における撮像画像の監視領域と前回の制御周期における撮像画像の監視領域間で求める。
(もっと読む)
41 - 60 / 1,739
[ Back to top ]