
Fターム[5B057DC03]の内容
Fターム[5B057DC03]に分類される特許
241 - 260 / 1,739
エッジ検出方法、エッジ検出装置、及び検査装置
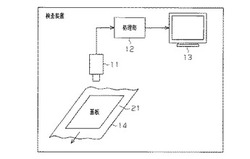
【課題】安定してエッジを検出することが可能なエッジ検出方法を提供すること。
【解決手段】処理部12は、補間画像データに含まれる画素の輝度値に基づいて、同一輝度値の複数の画素について画素の振れ幅を算出し、振れ幅が最も小さい画素の輝度値を算出する。そして、処理部12は、算出した輝度値をエッジ判定値とし、補間画像データに含まれる画素のうち、エッジ判定値と等しい値の画素をエッジとして検出する。
(もっと読む)
物体形状生成装置及び方法

【課題】3次元モデルを入力データとして取得できる距離画像から自動的に生成する。
【解決手段】本実施形態によれば、物体形状生成装置は、画像入力装置と、形状抽出部と、接続情報算出部と、画像処理部を備えた構成である。画像入力装置は、対象物体の複数の距離画像を取得する。形状抽出部は、前記各距離画像を使用して、前記対象物体を構成する各部分の形状情報を抽出する。接続情報算出部は、前記各部分の相対位置及び角度を表す座標情報を含む接続情報を取得する。画像処理部は、前記形状情報及び前記接続情報に基づいて、前記対象物体の3次元モデルを生成する。
(もっと読む)
画像処理装置、画像処理方法およびプログラム
【課題】像高に応じたぼけ関数の変化にも関わらず、距離情報の、像高に応じた誤差を低減する。
【解決手段】画像が対角線によって4個のエリアに分割され、中心付近の円形のエリアが低像高のエリアとされ、4個のエリアから低像高のエリアを除いた4個のエリアが高像高のエリアとされる。像高に応じてぼけ関数の形状が変化する。ぼけ関数の変化に合わせて距離を求めるためのぼけ付加用のガウスフィルタ標準偏差を変化させる。一例として、低像高エリアに対して標準の2次元ガウスフィルタが適用され、上下の高像高エリア、並びに左右の高像高エリアに対してぼけ関数の変化を相殺するような2次元ガウスフィルタが適用される。
(もっと読む)
ランドマーク検知方法、ロボット及びプログラム
【課題】ランドマーク検知方法、ロボット及びプログラムにおいて、ランドマークの検知精度を向上させることを目的とする。
【解決手段】自律走行型ロボットからランドマークを検知するランドマーク検知方法において、ロボット内でカメラが出力する撮像画像に基づいてランドマークの特徴点の特徴ベクトルを生成し、前記特徴ベクトルとランドマーク登録時の特徴点の特徴ベクトルとに基づいてマハラノビス距離を計算し、前記マハラノビス距離が最小の特徴ベクトルを選択してランドマークの検知結果とし、ロボットの移動量と正規分布誤差に基づいてロボットの現在位置の候補を求め、前記ロボットの現在位置の候補について、登録されているランドマークの位置との整合性を評価して評価結果を出力し、前記ロボット位置の候補の座標に前記評価結果に応じて重み付け平均を計算してロボットの推定位置を得るように構成する。
(もっと読む)
ステレオ画像処理方法およびステレオ画像処理装置
【課題】 対象物と撮像装置との距離に応じて、高精度、高速に対象物の3次元情報を取得する。
【解決手段】 対象物を撮像する撮像装置と、同一の対象物を複数の方向から撮像した複数の高解像度画像を取得する画像取得部と、低解像度画像を生成する低解像度画像生成部と、基準画像上の点に対応する比較画像上の対応点を探索する対応点探索部と、対応点の探索結果に基づいて3次元情報を演算する3次元情報演算部と、低解像度画像に基づく3次元情報から高解像度画像における探索点の距離範囲を決定する距離範囲決定部と、距離範囲に基づいて高解像度画像における探索ウィンドウサイズを決定するウィンドウサイズ決定部と、距離範囲により定まる視差範囲に基づいて高解像度画像における前記対応点の探索範囲を限定する探索範囲限定部と、を備える。
(もっと読む)
画像処理装置および画像処理方法
【課題】体の特定部位を細く見せ、また逆に膨らみをつける等の画像処理を行うことのできる画像処理装置および画像処理方法を提供する。
【解決手段】被写体像を取り込み(S1)、取り込んだ画像に基づいて被写体像の中の顔画像の位置を検出し(S9)、検出された顔画像の人物の特定部分の領域を補正領域として特定し(S13、S19)、顔画像の顔年齢に基づいて、補正領域にアンチエージング画像処理を施し(S27)、アンチエージング画像処理が施された画像を表示する(S29)。
(もっと読む)
仮想環境におけるオブジェクトの選択方法
【課題】ジェスチャコマンドに基づく、簡単であり懇親的なユーザインタフェースを提供すること。
【解決手段】本発明は、第1の仮想環境における第1のオブジェクトの選択方法に関し、第1のオブジェクトは、第1の環境内で、閾値未満の値のサイズで表される。第1のオブジェクトの選択をより懇親的にするために、本方法は、・ユーザの指示ジェスチャに関連づけられた方向(120)を推定するステップと、・前記推定された方向(120)に従って、第2のオブジェクト(12)を判定するステップであって、前記第2のオブジェクトは、前記閾値より大きい値のサイズを有する、ステップと、・前記第2の判定されたオブジェクト(12)に従って、前記第1のオブジェクト(112)を選択するステップとを含む。本発明は、選択方法の実装に適合されたマルチメディア端末(18)にも関する。
(もっと読む)
自動処理装置
【課題】装置本体の消費電力を十分に抑制でき、且つ装置の寿命延命化を図ることができる自動処理装置を提供する。
【解決手段】ATM1は、利用者検知ユニット10が利用者を検知すると、表示・操作ユニット3に対する一次電源の供給を開始する。ATM1は、利用者による取引種別の選択入力が行われると、選択された取引種別の取引処理に関与するユニットを判断し、ここで判断したユニットに対する電源供給を開始する。一方、ATM1は、利用者検知ユニット10で検知された利用者が取引を行わなかったとき(利用者の誤検知であった場合)、一次電源の供給を開始したユニット毎に動作の停止を指示し、そのユニットのシャットダウン処理の完了後に一次電源の供給を停止する。
(もっと読む)
ステレオ画像処理装置、画像処理方法及びプログラム
【課題】 撮影画像の画質及び距離画像の精度を向上することのできるステレオ画像処理装置を提供する。
【解決手段】 マッチング回路18は、増幅回路16から出力される2つの映像信号に対して周知のマッチング処理を行い、画像のずれ量を示す信号を出力する。距離画像生成回路20は、マッチング回路18からの出力を受けて、撮影対象物までの距離を測定して距離画像を生成する。加算回路22は、増幅回路16から出力される映像信号の一方に対して、画像のずれ量に相当する分だけ画像をずらした後に、2つの映像信号を加算することで、低輝度域や中輝度域におけるノイズ成分を低減する。加算回路22からの出力信号に対し、非線形処理回路24による非線形処理が施され、監視用画像が出力される。また、増幅制御回路28では、増幅回路16から出力される映像信号のレベルが所定範囲内に入るように、増幅回路16での増幅率を制御する。
(もっと読む)
情報処理装置、情報処理システム、及びプログラム
【課題】撮影された映像の視界空間上の座標に対して関連づけられたタグを用いることのできる情報処理システムを提供する。
【解決手段】情報処理装置100は、コンテンツを撮影する撮像装置の位置である視点位置の情報を取得する視点情報取得部121と、上記視点位置から上記コンテンツを撮影したときの視界空間を示す視界情報を取得する視界情報取得部122と、上記視点情報、上記視界情報、及び奥行き情報により特定される視界空間上の座標位置と関連づけられたタグの情報を生成するタグ情報生成部124とを有する。
(もっと読む)
画像合成装置、プログラム及び画像合成方法
【課題】切り出した複数の差分画像を不自然さを生じさせることなく合成することを可能にする。
【解決手段】切り出した複数の差分画像を合成した合成画像において、被写体が重なるか否かを判断する(ステップS13)。重なる場合には、重なる何れか一方の被写体を重ならない位置に移動する(ステップS14)。合成画像内に存在する人物被写体に配置条件があるか否かを判断する(ステップS15)。配置条件が登録されている場合には、配置条件に従った配置スペースが合成画像内にあるか否かを判断する(ステップS16)。ある場合には、ステップS16からステップS17に進み、配置条件に従って被写体を移動させる。スペースがない場合には、ステップS16からステップS18に進み、配置条件が登録された人物被写体を空きスペースに配置する。
(もっと読む)
車両検出装置及び車両検出方法
【課題】 直線道路のガードレールや側壁などの固定物体と自車両との距離が一定で、相対速度もほぼ0となる場合でも、ガードレールや側壁などの固定物体が自車両に接近してくる他車両(接近物体)であると誤検出することを防ぐ車両検出装置を得る。
【解決手段】 自車両の外部を撮像して得られる入力画像データから、物体の動きの方向や物体の動きの大きさを示す動き情報が抽出され、抽出された動き情報の規則性に基づいて、固定物体の有無を判定するので、側壁等の固定物体を他車両として誤検出することを防ぐ制御ができる。
(もっと読む)
画像処理装置、画像処理方法、プログラムおよび記録媒体
【課題】小さな有彩画像が小領域にまたがって存在する場合にも、適切に属性を判定する。
【解決手段】小領域の属性を判定する際に、その周辺部を判定範囲に含める。小領域(4、3)の周辺の枠線601を判定範囲とする。小領域(4、3)の周囲を判定範囲とすることにより、有彩画像が2つの小領域にまたがっていても、有彩画素501の連続長が所定長に達するため、有彩原稿と判定できる。
(もっと読む)
撮像装置、長さ測定方法、及びプログラム
【課題】被写体上の指定された2点間の長さを精度良く測定する撮像装置を提供する。
【解決手段】被写体の指定された2点間の長さを測定する。撮像動作部100は、同一の被写体に対する1回の撮像で、視差のある1組のペア画像を取得する。表示部310は、取得されたペア画像の少なくとも一方の画像に基づく表示画像を表示する。操作部330は、表示画像上における被写体上の始点及び終点の指定を受け付ける。制御部210は、1又は複数組のペア画像に基づいて、指定された被写体上の始点及び終点における実空間上のそれぞれの位置を算出し、算出した実空間上の始点及び終点位置に基づいて、被写体上の始点から終点までの長さを取得する。
(もっと読む)
電子部品の撮像判定方法及び部品実装機
【課題】部品実装機において電子部品のピンの先端部のみを鮮明に撮像できる撮像判定方法及び該方法を実現する部品実装機を提供すること。
【解決手段】光照射手段28による水平方向に照射されている光L内で電子部品CのピンPを移動させているので、例えばピンの移動を上下方向とすることにより部品本体B及びピンの外筒部での光の反射を防止でき、ピンの先端部のみを鮮明に撮像できる。さらに、ピンの移動開始から移動終了まで連続してピンを撮像するようにしているので、電子部品のピックアップ部位が異なってピンの先端部の上下方向の位置が異なっていたとしても、また、電子部品の製造ロットや製造メーカによって各ピンの長さにバラツキが生じていたとしても、全てのピンの先端部の累積画像から鮮明な画像を容易に取得できる。よって、ピンの形状や配置の良否、ピンの抜けや曲げや折れの有無等の検査を容易且つ高精度に行うことができる。
(もっと読む)
色対色の位置ずれを検出するシステム及び方法
【課題】色位置合わせ模様を利用して色対色の処理方向の位置ずれエラーを検出するシステム及び方法が提供される。
【解決手段】このシステム及び方法は、複数の色での印刷を可能にするプリンタを含み、プリンタはプリンタにより基板上に印刷される色位置合わせ模様に対応する情報を有する信号を生成するセンサを有する。このシステム及び方法は、センサから信号を受信し、色対色の処理方向の位置ずれを検出するためにアルゴリスムを介してその信号を分析するプロセッサを更に含む。色位置合わせ模様は、複数の区画を含み、各区画は、複数の色のうちの異なる色に関連し、複数の区画のうちの少なくとも1つの他の区画とは異なる、少なくとも1つの解像度を含む。
(もっと読む)
検査方法およびその装置
【課題】
半導体製造プロセスにおいて,パターン微細化に伴い,致命となる欠陥サイズも微小化しており,微細な欠陥を検出するために欠陥検査装置の感度を上げると,本来は欠陥ではない製造公差などを検出してしまい,欠陥の発生傾向を捕らえることが困難となる。
【解決手段】
被検査対象を検査する方法において,被検査対象の指定箇所について画像撮像手段を用いて撮像し,撮像した画像から欠陥を検出し,撮像した画像から回路パターンを認識し,検出した欠陥から画像濃淡および形状に関する特徴量を算出し,認識した回路パターンから画像濃淡および形状に関する特徴量を算出し,検出した欠陥と認識した回路パターンの中から特定の欠陥又は回路パターンをフィルタリングして抽出し、フィルタリングして抽出された特定の欠陥又は回路パターンの特徴量の中からマッピングする特徴量を決定し、決定した特徴量の分布状況を画面上にマップ形式で表示するようにした。
(もっと読む)
車線位置検出装置および車線位置検出方法
【課題】低処理負荷で、車載カメラの撮影映像から車線境界線と車両との位置関係を検出する事ができる車線位置検出装置および車線位置検出方法を提供する事。
【解決手段】ECU300は、車両周辺の路面を車載カメラで撮影した映像から車線境界線と車両との位置関係を検出する車線位置検出装置であって、映像からの車線境界線の抽出を行う車線抽出部310と、抽出された車線境界線のエッジを上方視点座標に変換する上方視点データ生成部330と、上方視点座標におけるエッジの位置から車線境界線と車両との位置関係を検出する車線位置検出部340とを有し、上方視点データ生成部330は、映像の特定のライン上に存在する車線境界線のエッジ点のみを上方視点座標に変換し、車線位置検出部340は、上方視点座標におけるエッジ点の位置の時系列データから上方視点座標におけるエッジの位置を求める。
(もっと読む)
ターゲット投影装置及びターゲット投影方法
【課題】測定対象に投影されたターゲットが検出し難い場合に、投影用ターゲット画像を補正して、再度投影できるターゲット投影装置を提供する。
【解決手段】ターゲットTが表示された投影用ターゲット画像F1を測定対象2に投影する投影部3、投影部3から投影用ターゲット画像F1を投影して測定対象2に映されたターゲット映像F2を撮影して撮影画像F3を得る撮影部4、撮影部4で撮影された撮影画像F3からターゲットTの特徴を検出するターゲット特徴検出部62、撮影画像F3におけるターゲットTの特徴に関する所定の許容条件を記憶する許容条件記憶部54、撮影画像F3が所定の許容条件を満たすか否かを判定する許容条件判定部7、許容条件判定部7が所定の許容条件を満たさないと判定した場合には、所定の許容条件を満たすようにターゲットTの特徴を変更して投影用ターゲット画像F1を補正する画像処理部8とを備える。
(もっと読む)
データ関連付けのための方法と装置
【課題】 データ関連付け装置を提供する。
【解決手段】 データ関連付け装置は、カメラから対象の画像データを受信し、対象の第1の位置情報を生成する対象位置決めユニットと、対象位置決めユニットによって生成された対象の第1の位置情報を格納し、位置センサからの対象の第2の位置情報を格納する記憶ユニットと、記憶ユニットに格納された第1の位置情報と第2の位置情報に基づいて、カメラからの対象の画像データを、位置センサからの対象の第2の位置情報と関連付ける関連付けユニットとを備える。
(もっと読む)
241 - 260 / 1,739
[ Back to top ]