
Fターム[5B057DC03]の内容
Fターム[5B057DC03]に分類される特許
181 - 200 / 1,739
画像処理装置および画像処理方法
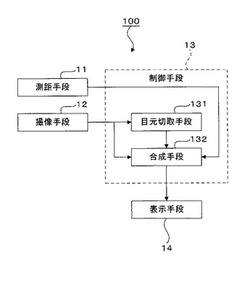
【課題】自然な表情の正視目線に補正する画像処理装置を実現する。
【解決手段】ユーザがカメラ(撮像手段12)を正視した状態で撮影して得た正視顔画像SGから目元画像MGを切り出した後、ユーザが表示手段14の表示画面を見つめている状態の顔を撮影して得た偏視顔画像HGを取得すると、その偏視顔画像HGを撮影した時の撮影距離が所定距離未満であれば、取得した偏視顔画像HGに、切り出した目元画像MGを合成して表示手段14に画面表示するので、自然な表情の正視目線に補正できる。また、顔の輪郭を含む目元画像MGを用いて偏視顔画像HGに合成しているので、目元画像MGを撮影した時の撮影距離と偏視顔画像HGを撮影した時の撮影距離とが異なる場合でも特徴点が多数ある為に拡大縮小することで自然な表情の正視目線に補正できる。
(もっと読む)
画像処理方法、画像処理装置および補正処理プログラム

【課題】表示装置により表示される表示画像を観察するとき、観察者の眼の網膜像には収差が生じており、表示画像の鮮明さが低下している。網膜上に発生する収差の程度は、観察者の眼の瞳孔径に応じて異なるため、収差の程度に応じた補正を行なう。
【解決手段】画像処理方法は、瞳孔径情報を用いて観察者の眼に生じる収差を推定する収差推定工程206と、収差推定工程により得られた収差推定量を、入力画像の補正量に変換する補正量取得工程208と、補正量取得工程により得られた補正量に従い補正を行う補正工程217から構成される。
(もっと読む)
画像処理装置、方法およびそのプログラム
【課題】2次元画像からより正確な奥行きを生成する。
【解決手段】実施の形態によれば、検出部は、画像に含まれる物体を検出する。選択部は、検出された物体の性質に応じて物体の奥行きの情報のベースとするデプスモデルを選択する。セグメント部は、検出された物体の領域を画像から区分する。デプスマップ生成部は、画像の奥行きを表現するデプスマップを生成する。この際、デプスマップ生成部は、画像中の検出された物体の位置に対応するデプスマップ上の位置に、デプスモデルを配し、配されたデプスモデルの領域と物体の領域とを比較し、互いに重なり合わない位置に対して、補正後の奥行値を与える。
(もっと読む)
画像処理装置及びそれを用いたX線診断装置、画像処理方法
【課題】対象画像中の線状パターンの視認性を向上させる画像処理装置を提供する。
【解決手段】
対象画像中の画素毎に、特定方向に連続性を持つ暗い線、又は、明るい線の線状パターンらしさを示す線値を検出する線状パターン検出部と、フィルタ範囲内に存在するフィルタ中心画素の画素値と周辺画素の画素値の差が大きいほど第1の重みが小さくなる第1の重み関数で構成される画像処理フィルタに関して、前記第1の重みパラメータ決定部と、前記対象画像の画素毎に決定した前記第1のパラメータと前記第2パラメータを含んだ前記第1の重み関数から構成される画像処理フィルタを、前記対象画像の各画素に施して、出力画像の各画素の画素値を算出するフィルタ処理部とを含む。
(もっと読む)
被写体数推定方法、被写体数推定装置、被写体数推定プログラム
【課題】矩形以外の形状(シルエット)を持つ被写体に対しても、画素単位の処理によって被写体数推定を精度良く行う。
【解決手段】被写体の形状(シルエット)を任意形状の微小矩形で近似し、当該微小矩形における基準表面積の積算値を求める。そして、この微小矩形における基準表面積の積算値を加算して、被写体における基準表面積の積算値を算出する。その結果、矩形以外の形状を持つ被写体に対しても、画素単位の処理によって被写体数を推定することができ、被写体の表面積算出の際の誤差を低減することが可能となる。
(もっと読む)
画像処理プログラムおよび画像処理装置
【課題】カメラの取り付け位置や取り付け姿勢の情報を迅速かつ精度良く得ることを課題とする。
【解決手段】設定部232は、4個のマーカーが映し出された画像平面上の4個に対応するカメラ座標系における仮想的な4つの対応点の中から基準マーカーとする点Mを選択する。そして、設定部232は、基準点Mまでの距離L0に所定の値を設定する。作成部233は、基準点M以外の点、つまり基準マーカー以外のマーカーに対応する点1〜点3までの各距離L1,L2,L3を表す数式を作成する。導出部234は、設定部232により設定された基準マーカーで採用する全ての符号パターンを導出する。棄却部235は、導出部234により導出された符号パターンの中から、距離L1、L2、L3の値の少なくとも1つが相応しい値となり得えない符号パターンを棄却する。
(もっと読む)
検知装置、及び、検知方法
【課題】車両の側方に搭載されたカメラが撮影した車外画像のみに基づいてカメラの光軸の位置ズレを簡易に検知できる技術を提供する。
【解決手段】車両と相対的に移動する物体の像の車外画像中の移動軌跡と基準となるラインとを比較してカメラの光軸の位置ズレを検知するため、検知装置はカメラの光軸の位置ズレを車外画像のみで簡易に検知することができる。
(もっと読む)
移動体識別装置、移動体識別プログラム
【課題】移動体について、障害物があったとしても、情報処理量の少ない効率的な処理によって、通過数のみならず、その種類をも、移動体の速度にかかわらず極めて精度の良好な状態で識別可能な移動体識別装置、移動体識別プログラムを提供する。
【解決手段】 演算装置10は、複数種類の移動体の移動方向に交差する短冊画像52について取得し、各短冊画像52に属するライン画像において変化の有無に係るライン画像の境目の位置情報から位置変量を算出し、更にこれに基づき移動体の通過速度を算出して、各短冊画像52における通過速度に応じた幅の部分を参照し、当該部分を移動体の移動方向と逆の方向へ時刻順に結合して抽出パターン画像56を生成し、移動体の種類ごとに予め格納された登録パターン画像62と抽出パターン画像56とをDPマッチングにより比較して、登録パターン画像62の種類に係る移動体を識別する。
(もっと読む)
画像処理装置及び画像処理方法
【課題】本発明は画像処理装置における撮影画面中の計測範囲設定の調整を容易にすることを目的とする。
【解決手段】視野内に搬送された対象物を撮像して2次元画像を得る撮像手段と、2次元画像を画面に表示する表示手段と、得られた2次元画像から対象物の輪郭を表す輪郭線を抽出する形状抽出手段と、輪郭線上の複数の点の位置を抽出する点位置抽出手段と、複数の点から2次元画像上の対象物の搬送方向における輪郭線の位置を代表する代表点の位置を決定する代表位置決定手段と、少なくとも代表点の位置と2次元画像上の対象物の搬送方向において予め設定された計測幅とに基づいて輪郭線を含む計測領域を得られた2次元画像上に設定する計測領域設定手段と、を備える。
(もっと読む)
画像表示装置、画像表示方法、サーバー装置およびサーバー制御方法
【課題】視覚的に楽しむことができるのみならず、聴覚的にも楽しむことができ、さらに、実用性をも備える画像表示装置等を提供する。
【解決手段】撮影された時計台の撮影画像を絵画風画像52に変換する(a)。撮影画像のうち、時刻表示部画像53を認識し、この認識された時刻表示部画像53の位置を表す座標位置を記憶した上で、時刻表示部画像53に対応する内蔵時刻表示部画像N1を、予めROMに記憶されている複数の内蔵時刻表示部画像の中から選択する。この選択された内蔵時刻表示部画像N1を絵画風画像52の前記座標位置に貼り付け合成したあと、この貼り付け合成された内蔵時刻表示部画像N1を、現在時刻に従って、順次、差替えて表示させる。また、撮影された前記時計台の鐘の音をサーバーからダウンロードし、予め定められた時刻となった際に、スピーカ15から前記鐘の音を発生させる。
(もっと読む)
撮像装置
【課題】測定対象物を測定しつつ画像を取得するとともに画像を所望の視線方向から観察できる撮像装置を提供する。
【解決手段】撮像装置1は、画像を取得する撮像素子18と、測定対象物Wの被照射領域W1に光線を照射する発光部26および光線を検出する受光部28を有し、発光部から被照射領域までの距離を測定する測定部20と、発光部の位置を測定する位置測定部21と、発光部の向きを測定する姿勢測定部22と、発光部の位置および向き並びに発光部から被照射領域まで距離に基づいて被照射領域の位置および向きを算出する領域状態算出部55と、画像から抽出画像を作成する画像切出し部54と、抽出画像を領域状態算出部により算出された位置および向きに対応付けて記憶する記憶部56と、仮想空間に位置および向きに基づいて配置された抽出画像を視線方向に基づいて変換した視線変換全体画像を作成し表示部に表示させる画像処理部57と、を備える。
(もっと読む)
画像処理装置、及び画像処理方法
【課題】路面のパターン(模様)、路面の亀裂、路面のペイント(最高速度などの道路標示)などによる車線の誤判定を低減する画像処理装置を提供する。
【解決手段】画像処理装置1は、車載カメラ2によって撮影された画像における道路の車線の位置を抽出する画像処理装置である。画像処理装置1は、車載カメラ2によって撮影された画像において抽出された輪郭線の消失点方向成分を抽出する消失点方向成分抽出部30と、消失点方向成分抽出部30によって抽出された消失点方向成分に基づいて、道路の車線を判定する車線判定部40とを備える。
(もっと読む)
三次元形状測定装置、三次元形状測定方法及びコンピュータプログラム
【課題】少ない投影パターン数で、形状変化が急激な計測対象や不連続な計測対象の高精度な形状計測を可能とする。
【解決手段】三次元形状計測装置は、明るさ変化を有するパターンを計測空間に投影するパターン投影手段と、パターンが投影された計測空間を撮影する撮像手段とを備え、計測空間に存在する計測対象の三次元形状を計測する三次元形状計測装置であって、撮影手段により得られた撮影画像のパターンの明るさ変化からパターンの局所的な配置情報を算出する局所配置情報算出手段と、撮影画像におけるパターンのボケ量を算出するボケ量算出手段と、局所配置情報とボケ量とに基づき、計測対象の三次元形状を算出する三次元形状算出手段とをさらに備える。
(もっと読む)
ひずみ測定装置およびひずみ測定方法
【課題】本発明は、所定の特徴パターンの変形を考慮しつつ測定精度の向上と情報処理量の低減とを図ることができるひずみ測定装置およびひずみ測定方法を提供する。
【解決手段】本発明のひずみ測定装置Saおよび該方法では、試験体SMに外力を作用させる前後における試験体SMの外力作用前画像Aおよび外力作用後画像Bから、パターンのマッチングによって仮伸縮率が求められ、この求めた仮伸縮率を用いて外力作用前画像Aまたは外力作用後画像Bにおけるパターンが変形され、この変形されたパターンに基づいて、試験体SMの外力作用後画像Bから、パターンのマッチングによって伸縮率が求められる。
(もっと読む)
運転者状態検知カメラ
【課題】高画素のカメラを使用することなく、これまでと同じ画素数のイメージセンサを使用しても、撮像した目の部分の画素数を増やすことができ、目の開閉判定が容易な運転者状態検知カメラを提供する。
【解決手段】カメラの前方正面に設けられ、画像を縦方向に拡大するかまぼこ型レンズ(2)と、かまぼこ型レンズ(2)の後方に設けられる凸レンズ(6)と、かまぼこ型レンズ(2)と凸レンズ(6)によって形成される像を撮像するイメージセンサ(3)と、撮像した運転者の顔の画像から目の部分を抽出し、目が開いているか閉じているかを判定する画像処理部(5)と、を備える。
(もっと読む)
人物特定装置、人物特定方法及び人物特定プログラム
【課題】顔の正面画像が含まれていない画像情報からでも、人物の特定を可能にすることを目的とする。
【解決手段】画像取得部110は少なくとも3方向から人の画像情報を取得する。3次元モデル生成部120は、画像取得部110が取得した画像情報に基づき、その人を3次元モデルで表した3次元モデル情報を生成して、その人を識別するための情報として3次元モデル情報を3次元モデル記憶部130に記憶させる。その後、画像取得部110は新たに人の画像情報を取得する。人物特定部140は、画像取得部110が新たに取得した画像情報が示す人の姿勢に、3次元モデル記憶部130が記憶した3次元モデル情報の姿勢を変形して、画像情報が示す人と3次元モデル情報とを比較することにより、画像情報が示す人を特定する。
(もっと読む)
放射線撮影装置、放射線撮影システム、画像処理装置及びプログラム
【課題】逆コンプトン散乱により放射線を照射する放射線源を用いた場合でも良好なエネルギーサブトラクション画像を得ることができる放射線撮影装置、放射線撮影システム、画像処理装置及びプログラムを提供する。
【解決手段】撮影された高エネルギーの放射線による放射線画像及び低エネルギーの放射線による放射線画像を対応する画素毎に、放射線源から照射される放射線の中心位置からの距離に応じて重み付けを変え、高エネルギーの放射線による放射線画像の重み付けを小さくして高エネルギーの放射線による放射線画像から低エネルギーの放射線による放射線画像を減算する重み付け演算を行って軟部画像を生成する。
(もっと読む)
撮像装置及び撮像方法
【課題】1回の撮影によって撮影者と被写体の両方の好みの表情の画像を得ることができる撮像装置及び撮像方法を提供すること。
【解決手段】スルー画表示前に、被写体200に表情の画像の採点をしてもらい、その採点結果をR値と対応付けて表情データベース116aに格納しておく。撮影前のスルー画表示時には、撮像素子107を連続して動作させて得られるスルー画像における顔部の画像からR値を算出し、算出したR値に対応する点数を表情データベース116aから抽出し、抽出した点数に基づいて撮影前の被写体200の表情のレベルを表示パネル111に表示させる。
(もっと読む)
画像処理装置及びその制御方法、コンピュータプログラム
【課題】被検眼の網膜の状態に応じて検出する層の種類を選択し、網膜層の解剖学的特徴に基づいて層を検出することにより減弱領域も含めて層境界を高精度に検出可能とする。
【解決手段】被検眼の網膜層を解析する画像処理装置であって、網膜層の断層像から得られた投影像と、被検眼の眼底画像とから、被検眼における解剖学的特徴を表す特徴量を抽出する特徴抽出手段と、特徴量に基づいて、解剖学的特徴の種類を判定する判定手段と、判定された解剖学的特徴の種類に応じて網膜層の中から検出する層を決定し、決定した層の構造を断層像において検出する層構造検出手段と、層構造検出手段により検出された層の構造のうち、解剖学的特徴を有する領域に含まれる層の構造を変更する層構造変更手段とを備える。
(もっと読む)
顔メーキャップ適用機械及びそれを用いたメーキャップ適用方法
【課題】手動のメーキャップを施す方法における、及びメーキャップの試行用の色シミュレーション装置における問題を緩和する及び/又は除去するための改良された方法及び装置を提供すること。
【解決手段】ベース1、ロボット2、化粧品供給器具3、及び制御装置4を含む顔メーキャップ適用機械が提供され、制御装置4は、人間の顔に対応する輪郭に化粧材料を噴霧又は塗布するために、化粧品供給器具3をメーキャップ適用位置に動かすようにロボット2を制御することができる。使用者によって選択された又は模倣された顔へのメーキャップ適用を、色々とかつ正確に実行するための自動的なメーキャップの適用を提供するとともに、個別の顔イメージは内蔵することができ、又は外部の保存装置44又はイメ−ジ認識装置によって提供することができる。保存装置44は複数のメーキャップ適用プロファイルを選択肢として事前に保存することができる。
(もっと読む)
181 - 200 / 1,739
[ Back to top ]