
Fターム[5B057DC03]の内容
Fターム[5B057DC03]に分類される特許
261 - 280 / 1,739
データ関連付けのための方法と装置
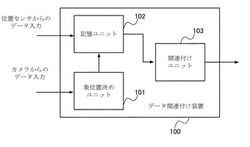
【課題】 データ関連付け装置を提供する。
【解決手段】 データ関連付け装置は、カメラから対象の画像データを受信し、対象の第1の位置情報を生成する対象位置決めユニットと、対象位置決めユニットによって生成された対象の第1の位置情報を格納し、位置センサからの対象の第2の位置情報を格納する記憶ユニットと、記憶ユニットに格納された第1の位置情報と第2の位置情報に基づいて、カメラからの対象の画像データを、位置センサからの対象の第2の位置情報と関連付ける関連付けユニットとを備える。
(もっと読む)
農作物管理方法及び農作物管理装置

【課題】 生育中であり且つ購入の予約がなされた農作物が収穫されたか否かを確認することができる農作物管理方法及び農作物管理装置を提供する。
【解決手段】
農作物管理装置1は、農園内で生育中の農作物を撮像するカメラ3と、カメラ3により得られた画像データを記憶する画像情報DB12Dとを備えており、画像情報DB12Dに記憶されている画像データに基づいて、前記生育中の農作物が収穫されたか否かを判定し、その判定結果を示す収穫情報をスピーカ5にて音声出力する。
(もっと読む)
3次元距離計測装置及びその方法
【課題】曲面のエッジ部分等における形状計測精度の向上を図り正確なギャップ計測を行う3次元距離計測装置及びその方法を提供する提供する。
【解決手段】画像を撮影する複数の撮像装置と、計測対象物が所定範囲で重なるように撮像装置を回転させて光軸を調整する回転駆動装置とを備えた3次元撮影手段と、複数の画像に写された所要計測点の画素の位置対応付け情報を演算する対応付け演算処理手段と、位置対応付け情報と回転駆動装置の回転情報とを用いて計測対象物の3次元形状を演算する3次元形状演算処理手段と、3次元形状から計測対象物の3次元形状が得られない領域の3次元形状を推定する3次元形状推定演算処理手段と、推定結果より計測対象物上において指定された2点の距離計測点の3次元座標を演算する3次元計測座標演算処理手段と、これらの3次元座標を用いて2点間の距離を演算する距離演算処理手段とを備えた。
(もっと読む)
画像処理装置及び画像処理方法
【課題】画質を損なうことなく、線幅の見た目の太さの差異を保持した細線化処理を行う
【解決手段】画像処理部100は、注目画素Cが輪郭画素であるか否かを検出するエッジ抽出部120と、注目画素Cを含む線画の線幅を検出し、検出された線幅に応じて注目画素Cに細線構造信号ThinLine[ch]を設定し、細線構造信号ThinLine[ch]と細線化強度係数FTVL、BTVLとを対応付ける対応付け情報を保持し、細線構造信号ThinLine[ch]及び対応付け情報に基づいて算出された補正値dST[ch]を用いて細線化処理を施す細線化処理部130と、を備える。
(もっと読む)
通信端末及び画像データ保護方法
【課題】煩雑な操作を不要とし画像データを漏れ無く確実に保護する。
【解決手段】通信端末10は、複数の画像データと各画像データのシークレット設定情報とを対応付けて記憶している画像記憶部11と、基準の画像データに含まれる認証対象情報の特徴点情報を記憶している特徴点記憶部12と、画像データの照合に用いられるパラメータ情報を記憶しているパラメータ記憶部13と、対象の画像データと特徴点情報とパラメータ情報とを読み出す読出し部14Aと、パラメータ情報に基づいて特徴点情報と対象の画像データとを照合する照合部14Bと、特徴点情報と対象の画像データが一致するとの照合結果が得られた場合、保護処理(例えば、対象の画像データのシークレット設定情報がオンになるよう、画像記憶部11に記憶された対象の画像データのシークレット設定情報を更新する処理)を行う設定更新部14Cとを備える。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム
【課題】試料の観察画像の回転を精度よく検出することのできる画像処理技術を提供する。
【解決手段】本発明に係る画像処理装置は、試料の測定箇所を含む広角画像データを介して、測定画像データと基準画像データの間の回転ずれを間接的に補正する。
(もっと読む)
画像処理方法、画像処理装置、プログラム及びプログラム記憶媒体
【課題】等幅線と面、または面同士の境界に隙間が生じることのない、等幅線と面とが混在した画像のベクトル化を実現する。
【解決手段】色領域毎に等幅線・面の分離処理を行う。分離後、等幅線が位置していた画素位置を隣接する面の色情報で穴埋めする。等幅線を穴埋めして得られるデータに対して境界共有型のベクトル化処理を行う。また、等幅線・面の分離処理で得られた等幅線に基づいて、芯線と線幅とで表されるベクトルデータを生成する。色毎に抽出した等幅線のベクトル化結果と、等幅線領域を穴埋めした後のデータから生成された面の境界線ベクトル化結果とを出力する。
(もっと読む)
電子機器及び画像表示方法並びにプログラム
【課題】お気に入りの画像ファイルを選択するといったユーザ操作を行うことなく、観賞者であるユーザに関連する静止画像を提示することができる電子機器を実現する。
【解決手段】操作者認識部304は静止画像データ401をインポートする操作者を認識する。登場人物認識部308は、静止画像データ401に含まれる顔画像に基づいて登場人物を認識する。グループ作成部306は静止画像データ401を分類してグループ化する。そして、インデックス情報格納部309は、操作者、登場人物、及びグループの情報をインデックス情報402として格納する。また、観賞者認識部313は、画面に表示される静止画像を観賞する観賞者を認識する。グループ抽出部314は、インデックス情報402に基づいて、観賞者に関連する静止画像を含むグループを抽出する。画像表示部316は、抽出されたグループに含まれる静止画像を画面に表示する。
(もっと読む)
キャリブレーション装置、欠陥検出装置、欠陥修復装置、表示パネル、表示装置、キャリブレーション方法
【課題】マーカを表示しようとした画素が欠陥画素であるため、キャリブレーションパターンが正確に表示されない場合においてもキャリブレーションを可能とし、撮像画像における任意の座標値に対応する表示パネルにおける位置を特定する座標値を算出する。
【解決手段】
対象物を撮像するカメラと、前記カメラが撮像した撮像画像を取り込む画像取込部と、
前記画像取込部が取り込んだ前記撮像画像における複数のマーカの位置を特定する座標値を備える座標対応情報を作成する座標対応情報作成部と、前記対象物における前記マーカの位置を特定する座標値を備えるマーカ座標情報と前記座標対応情報とを用いて、前記座標取得部が取得した座標に対応する対象物における位置を特定する座標値を算出する座標変換部とを備えるキャリブレーション装置であって、座標対応情報における前記マーカ間のピッチが、基準ピッチと異なる場合に、前記座標対応情報を補正する座標対応情報補正部を備えることを特徴とする。
(もっと読む)
パターン検査装置および方法
【課題】半導体集積回路の線幅管理用に、CD−SEMが用いられているが、CD−SEMの自動測定機能は1次元対応で、2次元形状は、CD−SEMや他の顕微鏡から取得された画像を使って操作者が手動で検査しているので、この検査工程を自動化する技術を提供する。
【解決手段】「検査対象パターン画像」と検査対象パターンを製造するために使用する「設計データ」を用いるパターン検査装置であって、データから線分もしくは曲線で表現された基準パターン生成部11と、検査対象パターン画像を生成する画像生成装置7と、検査対象パターン画像のエッジを検出し、検査対象パターン画像のエッジと線分もしくは曲線で表現された基準パターンとを比較することにより、検査対象パターンの測定値を得る検査部12と、測定値の分布から、パターンの製造に関するフィードバック情報を取得する出力部13とを備えた。
(もっと読む)
同一人判定装置、同一人判定方法および同一人判定プログラム
【課題】複数の画像データ中の人物が同一人であるか否かを少ない演算量で判定すること。
【解決手段】同一人判定装置100は、第1の画像に含まれる第1の人物の第1の部位が、撮像装置のレンズの焦点からみて存在していた第1の方向と、第1の画像に含まれる第1の人物の第2の部位が、撮像装置のレンズの焦点からみて存在していた第2の方向と、第2の画像に含まれる第2の人物の第1の部位が、撮像装置のレンズの焦点からみて存在していた第3の方向と、第2の画像に含まれる第2の人物の第2の部位が、撮像装置のレンズの焦点からみて存在していた第4の方向とを算出する方向算出部143と、第1の方向と第3の方向の交点と、第2の方向と第4の方向の交点を算出する交点算出部144と、交点の距離を算出する二点間距離算出部145と、距離が所定の範囲内であるか否かに基づいて、同一人であるか判定する同一人判定部142とを備える。
(もっと読む)
画像処理シミュレーション方法及び画像処理シミュレーションプログラム
【課題】画像処理装置の画像処理方式に適した処理時間予測を行うことにより、予測誤差を小さくする。
【解決手段】シミュレータ20は、画像処理装置10の画像処理部11の画像処理方式に合わせた処理時間予測関数24の係数を、画像処理部11が評価用コンテンツ22の画像処理に要した処理時間に基づいて決定する関数係数算出部23と、画像処理部11が実行用コンテンツ30を画像処理するのに要する予測処理時間を処理時間予測関数24を演算して予測する処理時間予測部25と、実行用コンテンツ30をシミュレーション用に画像処理すると共に、この画像処理に要する処理時間を調整して予測処理時間に一致させる画像処理シミュレーション部26とを備える。
(もっと読む)
プロジェクタシステム
【課題】本発明の課題は、画像が投影されている場所に出てプレゼンテーションを行っている場合等であっても、キーやマウス等を操作することなく、ジェスチャ等により自由に操作できるプロジェクタシステムの提供にある。
【解決手段】本発明のプロジェクタシステムは、投影画像データを出力する投影用画像出力部と、投影画像データを投影する画像投影用プロジェクタ部と、画像が投影される画像投影エリアにおける所定の動きを撮像するための画像認識用撮影部とを有し、投影用画像出力部から出力される投影画像同等データと、画像認識用撮影部から出力される撮像画像データとの差分を抽出する画像差分抽出部を有することを特徴とする。
(もっと読む)
距離取得装置
【課題】ステレオカメラで撮影したステレオ画像から、精度の高い距離測定を行うことができるとともに処理時間の短い距離取得装置を提供する。
【解決手段】ステレオカメラで撮影した複数のステレオ画像ペアを入力する画像入力手段8と、各画像ペアから視差を計算する複数の第一の視差検出手段11、12、13、14と、第一の視差検出手段により検出された視差が所定の範囲の場合に、前記視差検出に使用した画素を含む各画像ペアの一方の画像の領域において画素を補間する複数の画像補間手段と、前記画素補間された領域を使用して視差を計算する複数の第二の視差検出手段と、ステレオ撮像系の基線長に基づいて正規化する正規化手段と、正規化された視差を用いて視差類似評価を行う視差類似評価手段15と、距離検出手段16とを有し、視差評価において、視差検出1の結果と視差検出3の結果の二つだけを利用して視差評価を行う。
(もっと読む)
画像処理装置、撮像装置、画像処理方法及びプログラム
【課題】写っている人物の眼が閉じておらず、手振れのない、明るさの十分な撮像画像を得る。
【解決手段】開き度算出部21は、高速連写により得られた複数の画像各々に含まれる人物の眼の開き度を算出する。重み設定部22は、算出された眼の開き度に応じて、複数の画像各々の重みを設定する。補正基準設定部23は、複数の画像各々の重ね合わせの基準となる補正基準を設定する。明るさ調整部24は、複数の画像を重ね合わせて得られる合成画像の明るさが所定の明るさとなるように、設定された複数の画像各々の重みに応じて、複数の画像各々の明るさを調整する。位置ずれベクトル算出部25は、補正基準に対する複数の画像各々の位置ずれベクトルを求める。手振れ補正部26は、補正基準を基準に、算出された位置ずれベクトルに応じて、複数の画像各々をずらしながら重ね合わせて合成画像を生成する。
(もっと読む)
運転支援装置、運転支援方法およびプログラム
【課題】 初期状態からの画像のずれを自動的に補正する機能を提供する。
【解決手段】 運転支援装置100は、車両に取り付けられたカメラ10と、カメラ10の設置条件のデータを記憶した設置条件記憶部39と、設置条件記憶部39に記憶された設置条件のデータを用いて、画像中に映る路上の所定点までの距離を画像内での所定点の位置座標から算出する理論距離算出部35と、所定点までの距離を求めるステレオ測距部34と、ステレオ測距部34にて求めた距離と理論距離算出部35にて求めた距離との差分を求める差分算出部36と、差分算出部36で求めた差分に基づいてカメラ画像を補正する射影変換部38と、射影変換部38にて補正したカメラ画像に対し、運転を支援するためのガイド線を重畳するガイド線重畳部40とを備えた構成を有する。
(もっと読む)
特徴抽出装置および方法、プログラム
【課題】物体の認識に効果的な、距離データを用いた特徴量抽出方法において、物体の未知なる三次元姿勢変動による影響を受けにくい特徴量を提供する。
【解決手段】任意の計測手段から得られた対象物体の距離データ点群に対し、注目点を中心とした複数の同心球殻領域と細分割領域を設定し、それぞれの細分割領域における局所的な近似平面から法線情報を算出し、注目点を中心として正規化法線情報を算出し、それぞれの同心球殻領域における、正規化法線情報に関する球殻領域法線情報ヒストグラムを生成し、同心球殻領域の複数の組み合わせによって階層状のブロック領域を定義して法線情報ヒストグラムを連結して正規化することで階層ヒストグラムを生成し、すべての階層ヒストグラムを連結して注目点における特徴ベクトルとする。
(もっと読む)
画像処理方法、画像処理装置、コンピュータが読取り可能な媒体及びコンピュータプログラム
【課題】3次元医療用画像にて、生成される偽陽性結果の数の抑制しながら、高い感度を持って目的の対象物を検出することができる画像処理方法、画像処理装置及びコンピュータプログラム並びに該画像処理方法を実行させる指示を記憶しているコンピュータが読取り可能な媒体の提供。
【解決手段】コンピュータによって実現され、3次元医療用画像にて対象物を検出する方法は3次元医療用画像の少なくとも一部分にある各ボクセルで複数の特徴の値を求めるステップを備える。各特徴は、特定のボクセルにて3次元医療用画像の各特徴を示す。特徴の値、及び、既存の医療情報に基づいて、各特徴の尤度確率分布を計算する。尤度確率分布を組み合わせるベイズ法を用いることによって確率マップを生成し、対象物を検出するために確率マップを解析する。
(もっと読む)
対象物の位置を算出するための装置
【課題】車両の挙動如何にかかわらず、撮像された画像から検出された対象物の位置を、より良好な精度で判定する。
【解決手段】車両に搭載されたカメラを用いて車両の周辺を撮像し、撮像された画像に基づいて、実空間において車両から所定値以上の距離を有し、かつ所定値以上の高さに位置すると推定される遠方物体を検出する。また、撮像された画像に基づいて、所定の対象物を検出する。画像上において、該検出された遠方物体に含まれる所定の点を基準として、該検出された対象物に含まれる所定の点の位置を特定する。該画像上の該特定された位置に基づいて、実空間上の対象物の位置を算出する。画像において、遠方物体に対する対象物の相対的な位置関係は、車両のピッチング等の影響を受けないため、該ピッチング等の影響を受けることなく、対象物の実空間上の位置を求めることができる。
(もっと読む)
位置姿勢計測装置、位置姿勢計測方法およびプログラム
【課題】 距離画像の計測値の欠損に起因した精度低下を軽減することが可能な位置姿勢の計測技術を提供すること。
【解決手段】 対象物体の位置姿勢を計測する位置姿勢計測装置は、対象物体の距離画像上の画素に対して距離が最小となる形状モデル上の点が、第1の探索部により得られた欠損モデル領域内に存在するか否かを判定する判定部と、形状モデル上の点が欠損モデル領域内に存在すると判定された場合に、第2の探索部により得られた、距離が最小となる距離画像上の画素と形状モデル上の点との組み合わせに補正を施す補正部と、補正が施された、距離画像上の画素と形状モデル上の点との組み合わせにおいて、距離画像上の画素と形状モデル上の点との間の距離の総和を最小にする形状モデルの位置及び姿勢を、対象物体の位置及び姿勢の計測値として算出する算出部と、を備える。
(もっと読む)
261 - 280 / 1,739
[ Back to top ]