
Fターム[5C054FE12]の内容
閉回路テレビジョンシステム (47,623) | 特殊表示 (4,983) | 複数映像の同時表示 (2,371) | 重畳表示 (1,482)
Fターム[5C054FE12]の下位に属するFターム
解析映像との重畳表示 (302)
資料映像との重畳表示 (256)
TV放送信号との重畳表示 (6)
メッセージ、クロックの重畳表示 (478)
Fターム[5C054FE12]に分類される特許
281 - 300 / 440
車両周辺監視装置
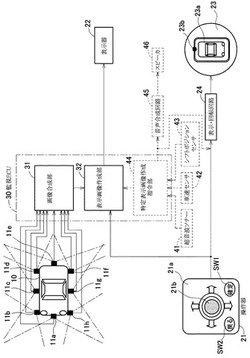
【課題】直感的にわかり易い画像を得ることが可能で利便性の高い車両周辺監視装置を提供する。
【解決手段】車両周辺監視装置は、カメラ11a〜11h、操作器21(操作インタフェース)、表示器22(表示手段)、インジケータ23(カメラ位置表示手段)および監視ECU30を備える。カメラ11a〜11hは、車両全周に渡って間隔をおいて車両10に設置される。監視ECU30の画像合成部31(画像合成手段)は、カメラ11a〜11hの撮影画像に基づいてカメラ11a〜11h間の中間位置に仮想的に設置された仮想カメラの仮想画像を作成し、この仮想画像と撮影画像を連続的に合成する。監視ECU30の表示画像作成部32(表示画像作成手段)は、画像合成部31により合成された合成画像に基づいて、任意のカメラ位置に対応した表示画像を作成して表示器22に表示させる。
(もっと読む)
運転支援装置

【課題】旋回時、実カメラを固定設置としながらも、視線を余り動かすことなく進行方向を注視し続けることができる手法を提案することで、より高い安全性を確保する運転支援を達成することができる運転支援装置を提供すること。
【解決手段】車両に固定設置したリアカメラ1とは異なる位置に設定した仮想カメラ8と、リアカメラ1により映し出される被写体側に設定した仮想投影面と、を用いた視点変換により、リアカメラ1のカメラ映像データから車室内のモニタ3に映し出すモニタ画像データを生成するモニタ画像データ生成手段を備えた運転支援装置において、モニタ画像データ生成手段は、車両旋回時、ハンドル操舵角センサ4により検出された中立位置からのハンドル操舵角θの大きさに応じて仮想カメラ8を車両の旋回方向に自転させ、自転する仮想カメラ8を用いた視点変換により、モニタ3に映し出すモニタ画像データを生成する手段とした。
(もっと読む)
運転支援装置
【課題】旋回時、運転場面に応じた最適なモニタ映像の表示変更制御を行うことで、的確な駐車操作支援や安全確認支援を達成することができる運転支援装置を提供すること。
【解決手段】車両に設置したリアカメラ1とは異なる位置に設定した仮想カメラ8と、リアカメラ1により映し出される被写体側に設定した仮想投影面と、を用いた視点変換により、リアカメラ1のカメラ映像データから車室内のモニタ3に映し出すモニタ画像データを生成するモニタ画像データ生成手段を備えた運転支援装置において、モニタ画像データ生成手段は、旋回後進時、ハンドル操舵角センサ4による中立位置からのハンドル操舵角θの大きさが大きいほど前記近景用スクリーン71と前記近景用CCD91による俯瞰映像領域3Bを拡大し、仮想カメラ8と領域制御による仮想立体スクリーン7及び仮想立体CCD9を用いた視点変換により、モニタ3に映し出すモニタ画像データを生成する手段とした。
(もっと読む)
産業車両の視界改善システム及び方法
【課題】産業車両の前方視界を改善し、操作性、安全性の向上を可能とした産業車両の視界改善システム及び方法を提供する。
【解決手段】座席の前方に遮蔽物を有する産業車両の視界を改善するためのシステムであって、産業車両のオペレータ5に装着され外部景色を透過するとともに画像を投影するヘッドマウントディスプレイ11と、遮蔽物より前方に固定され前方景色を撮像するカメラA10と、ヘッドマウントディスプレイに固定され前方景色を撮像するカメラB12と、画像処理装置13と、を備え、画像処理装置13が、カメラAの撮像画像AをカメラBの撮像画像Bに基づいて変形する画像変形部15と、変形画像から遮蔽物に相当する範囲を切り取る画像切取部16と、切り取った部分画像をヘッドマウントディスプレイ11に出力する画像出力部17と、を備えた構成とする。
(もっと読む)
光学ユニット、前記光学ユニットを用いた撮像装置、ならびに前記撮像装置を用いた車両用画像表示装置
【課題】レンズ部の表面に水滴が付着しにくく、屈折率の変化により正しく画像を写すことができないという不都合を抑止できるレンズユニット等を提供する。
【解決手段】レンズ部1の表面に撥水性を持たせるとともに、レンズ部1の周囲に形成された押え冠である非レンズ部2の表面に親水性を持たせることにより、レンズ部1の表面にできた水滴が非レンズ部2に接した場合に、撥水性のあるレンズ部1の表面から親水性のある非レンズ部2の表面に水滴を誘導し、レンズ部1への水滴の常駐を抑制することができるようにする。
(もっと読む)
運転支援装置
【課題】旋回時、運転場面に応じた最適なモニタ映像の表示変更制御を行うことで、的確な駐車操作支援や安全確認支援を達成することができる運転支援装置を提供すること。
【解決手段】車両に設置したリアカメラ1とは異なる位置に設定した仮想カメラ8と、リアカメラ1により映し出される被写体側に設定した仮想投影面と、を用いた視点変換により、リアカメラ1のカメラ映像データから車室内のモニタ3に映し出すモニタ画像データを生成するモニタ画像データ生成手段を備えた運転支援装置において、モニタ画像データ生成手段は、旋回後進時、ハンドル操舵角センサ4による中立位置からのハンドル操舵角θの大きさが大きいほど斜め視点映像領域3Pの斜め視点映像を俯瞰映像化し、仮想カメラ8と俯瞰映像化制御による仮想立体スクリーン7及び仮想立体CCD9を用いた視点変換により、モニタ3に映し出すモニタ画像データを生成する手段とした。
(もっと読む)
車両周辺監視装置
【課題】不適切な車両周辺監視画像の表示を抑制することができるとともに、可動部の移動にともなう予め想定されたカメラの姿勢の変動に対応した車両周辺監視画像の表示を行うことができる「車両周辺監視装置」を提供すること。
【解決手段】可動部の移動が検出された場合であっても、可動部に設置されたカメラ3,4,5の姿勢の変動が予め想定されたものである場合には、可動部の移動量に対応する補正情報を用いて補正されたマッピングテーブル20を用いて生成した車両周辺監視画像9,10を表示し、可動部以外に設置されたカメラ2の姿勢の変動が検出された場合または可動部に設置されたカメラ3,4,5の姿勢の変動が予め想定されたものでない場合には、車両周辺監視画像9,10の表示を中止または制限すること。
(もっと読む)
車載カメラの校正装置、校正方法、並びにこの校正方法を用いた車両の生産方法
【課題】簡単な構成で、短時間で精度良く車載カメラの校正が可能な車載カメラの校正装置を提供する。
【解決手段】車載カメラの校正装置は、以下のように回転行列を求めることによって、車両に取り付けられた車載カメラを校正する。
第1行列演算部21が、少なくとも異なる2箇所に配置された校正指標の校正点の基準座標系における座標に基づいて第1行列を演算する。校正点特定部15が車載カメラの撮影画像から校正点を特定する。第2行列演算部22が車載カメラの撮影画像上の校正点の座標に基づいて第2行列を演算する。第3行列演算部23が第1行列と第2行列とに基づいて車載カメラの回転状態を示す回転行列を演算する。
(もっと読む)
車載カメラの校正装置及び当該装置を用いた車両の生産方法
【課題】簡単な構成で、短時間で精度良く車載カメラの校正が可能、且つ校正の成否を迅速に判定可能な車載カメラの校正装置を提供する。
【解決手段】車載カメラの校正装置は、各部が以下のように回転行列を求めることによって、車両に取り付けられた車載カメラを校正し、その成否を判定する。
第1行列演算部21が、少なくとも異なる2箇所に配置された校正指標の校正点の基準座標系における座標に基づいて第1行列を演算する。校正点特定部15が車載カメラの撮影画像から校正点を特定する。第2行列演算部22が車載カメラの撮影画像上の校正点の座標に基づいて第2行列を演算する。第3行列演算部23が第1行列と第2行列とに基づいて車載カメラの回転状態を示す回転行列を演算する。成否判定部は、車載カメラの撮影画像に基づいて車載カメラの校正の成否を判定する。
(もっと読む)
表示制御装置
【課題】ガイドラインが重畳された映像に映された障害物までの距離感を表すことができるとともに該障害物の視認性を向上させる表示制御装置を提供すること。
【解決手段】表示制御装置は、始点画素から終点画素までの各画素に対してブレンド値がnmから0まで段階的に小さくなるよう定められたガイドライン画像において、車両から障害物までの走行領域内で車両から最も遠い地点に対応する画素のブレンド値nxを特定し、表示装置に表示させる各画素に対して、撮影された映像から該当画素の色を取得し(S7)、該当画素にガイドライン画像の画素を重畳する場合(S8)、ガイドラインの画素に対して定められたブレンド値niを、(ni−nx)×nm÷(nm−nx)に変更し(S10)、変更したブレンド値で、撮影された映像の該当画素の色とガイドラインの画素の色とをブレンドし(S14)、ブレンドした色で該当画素を表示装置に表示させる(S15)。
(もっと読む)
定位置にある複数のカメラからのビデオの表示を提供するインタフェース装置、前記ビデオのインタフェースと表示を提供する方法、及びプログラム
【課題】定位置にある複数のカメラからのビデオに対するインタフェースと表示を提供する。
【解決手段】メインカメラによって取得されたメインビデオストリームを第1のインタフェース部分に表示し、前記メインビデオストリームに時間的に関連する1以上のビデオストリームを追加インタフェース部分に表示する。前記ビデオストリームは、カメラの集合と前記メインカメラとによって取得される。前記ビデオストリームの表示は、前記ビデオストリームの各々において、前記メインビデオストリームの時点、それ以前、それ以降の各々のビデオ再生位置の集合の内の1つ以上を含む。
(もっと読む)
作業機械の周囲監視装置
【課題】機体の走行時における障害物との接触の可能性の有無を報知する。
【解決手段】下部走行体1eの上方に旋回可能に設けられた上部旋回体1dの旋回角を検出する旋回角検出手段8dと、所定の監視方向に向けて上部旋回体1dに取り付けられる監視装置13a,13dと、運転席に設けられた表示手段50と、監視装置からの信号に基づき監視用の表示画像を生成し、この表示画像を表示手段50に表示する表示制御手段22と、下部走行体1eの走行を指令する走行指令手段4c,4dと、旋回角検出手段8dで検出された旋回角と走行指令手段4c、4dで指令された走行指令とに基づき、監視方向に作業機械が走行するか否かを判定する判定手段22とを備え、判定手段22により監視方向に下部走行体1eが走行すると判定されると、表示画像に走行予定軌跡101を重ねて表示する。
(もっと読む)
映像合成装置
【課題】複数の撮影装置によって撮影された撮影映像から生成する合成映像の視認性を従来のものより向上させることができる映像合成装置を提供する。
【解決手段】車両周辺を撮影するカメラ2a乃至2dによって撮影された各撮影映像を合成した合成映像を生成する映像合成装置において、2つのカメラによって重複して撮影された撮影範囲22a乃至22dおよび23a乃至23dの映像をなす撮影画素のうち、撮影範囲22a乃至22dが撮影された映像をなす撮影画素を対応する画素位置に重複して対応付けると共に、撮影範囲23a乃至23dが撮影された映像をなす撮影画素を合成映像において何れの撮影画素も対応しない領域内の画素位置に重複して対応付け、合成映像の画素位置に重複して対応付けた各撮影画素をサンプルとして映像調整用のパラメータを算出し、算出したパラメータを用いて少なくとも1つの撮影映像の映像調整を行った上で合成映像を生成する。
(もっと読む)
人物監視システムおよび人物監視方法
【課題】 各カメラA、B、C、D、E、Fで撮影されている画像から任意のタイミングで監視対象者の顔画像を指定することができ、任意のタイミングで指定された監視対象者を各カメラで撮影された画像に含まれる顔画像との顔照合によって追跡監視することができる。この結果として、監視員の利便性が向上し、効率的な人物追跡機能を実現できる。
【解決手段】 人物監視システムは、監視領域内の各所に設置された複数のカメラA、B、C、D、E、Fで撮影された画像を監視装置20の表示部に表示し、その表示部に表示されている画像から特定の人物の顔画像が監視装置20の操作部で指定された場合、指定された人物の顔画像を監視対象者の顔画像として設定し、設定された監視対象者の顔画像と各カメラにより撮影された画像に含まれる顔画像とを照合処理装置10で照合し、その照合結果を監視装置20の表示部に表示する。
(もっと読む)
運転支援システム
【課題】この発明は、従来の欠点を解消でき、信頼性の高い障害物検出が行えるようになる運転支援システムを提供することを目的とする。
【解決手段】車両に搭載された表示器、互いの撮像範囲に共通領域が含まれるように車両に間隔をおいて設けられかつ車両周辺の画像を撮像する2台の撮像装置、各撮像装置によって撮像された2つの画像のそれぞれを、同一鳥瞰図座標系の鳥瞰図画像に変換する鳥瞰図画像生成手段、鳥瞰図画像生成手段によって生成された2つの鳥瞰図画像の差分をとることにより、高さのある障害物領域を抽出する障害物領域抽出手段、ならびに2つの鳥瞰図画像のうち一方の鳥瞰図画像を表示器に表示するとともに、その鳥瞰図画像のうち障害物領域抽出手段によって抽出された障害物領域を他の部分と識別できるように表示器に表示させる表示手段を備えていることを特徴とする。
(もっと読む)
合成映像表示装置
【課題】実際の車外に対して合成映像に生じる配色の差異を抑制しつつ、つなぎ目に違和感を生じさせない合成映像を複数の撮影装置の各撮影映像から生成することができる合成映像表示装置を提供する。
【解決手段】DSPは、各カメラ(S20〜S25)の各隣接カメラ(S21〜S23)に対して、該当カメラと隣接カメラとの重複する撮影範囲にあたる重複映像領域に含まれる撮影画素の画素値の輝度成分を加算した加算値の平均値に、該当カメラに対する加算値を等しくするためのゲインを算出し(S22)、これらゲインの平均値を該当カメラによって撮影された撮影映像を映像調整するための調整ゲインとして算出する(S24)。
(もっと読む)
カメラ制御システム及び方法、並びにプログラム及び記憶媒体
【課題】カメラの台数やプリセット数によらずプリセット設定工数を大幅に削減することができるカメラ制御システムを提供する。
【解決手段】撮影画角のプリセットを設定済みの第1のカメラからプリセット設定情報を取得する情報取得手段と、第1のカメラから第1のパノラマ画像を取得する第1の画像取得手段と、プリセットが未設定の第2のカメラから第2のパノラマ画像を取得する第2の画像取得手段と、取得した第1と第2のパノラマ画像の重ね合わせを行う重ね合わせ手段と、重ね合わせたパノラマ画像の相対的位置関係を算出する算出手段と、算出した相対的位置関係を用いて第1のカメラのプリセット設定情報を第2のカメラのプリセット設定情報に変換する変換手段と、変換して得られた第2のカメラのプリセット設定情報を第2のカメラに転送・保存して第2のカメラのプリセット設定を行う設定手段を持つシステムを構成する。
(もっと読む)
車両周辺監視システム、車両、車両周辺監視プログラム、車両周辺監視システムの構築システム
【課題】車載の撮像装置を通じて得られた画像において人間等の対象物体が遠景物体の空との境界部分に紛れ込んだ場合でも、この対象物体の存在および挙動を高精度で認識しうるシステム等を提供する。
【解決手段】本発明の車両周辺監視システム10によれば、高ゲイン状態の第1赤外線カメラ101および第2赤外線カメラ102のそれぞれを通じて得られた第1および第2画像のうち少なくとも一方を用いて1次対象物体候補P1が認識される。一方、低ゲイン状態の第1赤外線カメラ101を通じて得られた第1画像において2次対象物体候補P2が認識され、空間特性要件を満たす空間特性を有する2次対象物体候補P2が対象物体Pとして認識される。
(もっと読む)
ネットワークカメラ
【課題】本発明は、パン、チルトの速度に上限を設ける必要がなく、パン、チルトさらにはズーム中でもプライバシーゾーンを確実にマスクでき、マスクエリアの演算が容易に行えるネットワークカメラを提供することを目的とする。
【解決手段】本発明は、撮像範囲の中で表示不可とする所定の被写体の位置情報を記憶する設定部18aと、カメラの撮像方向を移動させながら撮像した画像を所定のタイミングで取込む画像取込部12と、を備え、マスク制御部20は、表示不可とする所定の被写体を含む画像を取込む際、設定部18aの情報に基づいて、被写体の現在のタイミングで取込んだ位置情報と、被写体の前回のタイミングで取込んだ位置情報とを含む画像領域にマスク処理を施すことを主要な特徴とする。
(もっと読む)
車両用表示装置
【課題】運転者が障害物までの距離感や転舵方向などを一見して理解することができる車両用表示装置を提供する。
【解決手段】車体部材28によって形成される運転者の死角領域を撮影する死角撮影手段3と、該死角撮影手段3によって撮影した死角領域映像cを前記運転者に対し表示する表示手段5と、を設けた車両用表示装置において、前記車体部材28を前記運転者側から透過した半透明車体モデル11と、前記死角撮影手段3によって撮影した死角領域映像cとを合成する合成手段を備えた。
(もっと読む)
281 - 300 / 440
[ Back to top ]