
Fターム[5C054FE12]の内容
閉回路テレビジョンシステム (47,623) | 特殊表示 (4,983) | 複数映像の同時表示 (2,371) | 重畳表示 (1,482)
Fターム[5C054FE12]の下位に属するFターム
解析映像との重畳表示 (302)
資料映像との重畳表示 (256)
TV放送信号との重畳表示 (6)
メッセージ、クロックの重畳表示 (478)
Fターム[5C054FE12]に分類される特許
201 - 220 / 440
全周映像のための表示技術
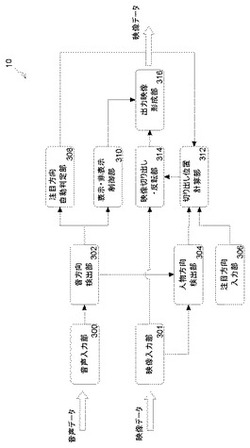
【課題】これまでよりも優れた全周映像の表示を実現する。
【解決手段】全周映像のうち特定の範囲の表示を行う映像表示技術と、特定の人物の箇所のみの映像を抜き出して表示する映像表示技術を組み合わせることにより、誰がどこへ向かって話しているか、3次元的な位置関係はどういうものであるかなどを容易に把握しうる全周映像表示を可能とする。人物が3次元的な位置関係を保って表示されることから、会話の流れを容易に把握することができる。実施形態によっては、抜き出した映像を表示するにおいて、位置調整や左右反転などの処理を入れることもでき、誰が誰に話しているかをさらに容易に把握することが可能となる。
(もっと読む)
駐車支援装置および駐車支援方法

【課題】運転に不慣れなドライバでも駐車を簡便に行えるように、駐車時の運転操作を適切に支援する。
【解決手段】自車の駐車目標となる駐車目標位置を設定するとともに、自車が現在のステアリング舵角を維持して進行したときの進路上に、駐車目標位置まで所定のステアリング舵角を維持して到達できる駐車開始位置を設定する。そして、自車周囲の俯瞰映像上に、自車の現在位置を示す自車両図形Vと、駐車目標位置を示す駐車枠図形F1と、駐車開始位置を示す駐車開始枠図形F2とを描画して、その映像を表示装置5に表示させる。このとき、駐車開始枠図形F2は、自車の現在のステアリング舵角に応じてその描画形態が変化するように俯瞰映像上に描画する。
(もっと読む)
駐車補助のための画像表示方法
【課題】自動車の運転補助用画像表示方法を提供する。
【解決手段】−特定の要因(EV)に従って変化する、自動車の3Dモデルの3D視点(POV)を定める過程と、
−前記3D視点(POV)に従って捉えられる3D映像(SC)を形成する過程であって、
前記3D映像(SC)は、
−前記3D視点(POV)に従って形成される自動車の3Dモデル、および
−自動車(V)に搭載したビデオカメラ(CAM)によって撮影され、かつインストゥルメンタルパネルのスクリーンに、前記3D視点(POV)に従って表示されることによって運転者から透視される立体角(A)の仮想視野(SCRV)を含み、
−前記ビデオカメラ(CAM)によって撮影され、かつ前記仮想視野(SCRV)内に投影された自動車の外部環境を含む3D映像を表示する過程とを含んでいる。
(もっと読む)
車両運転支援装置
【課題】自車両の走行に際しての要警戒対象物を速やかに特定して、臨場感あるいはよりリアリティのある画像表示を可能とした車両運転支援装置を提供する。
【解決手段】自車両1の前を走る先行車両に搭載したリアカメラが後向きで捉えた映像を車車間通信で自車両1にて受信する。その映像に画像認識処理を施し、要警戒対象物(後続車あるいは左右後側方の車両等)4の有無と自車両1との位置関係を特定し、要警戒対象物4に例えば枠囲みFを施した上で画面表示する。同時に、自車両1と要警戒対象物4との位置関係に応じて左右のアウトサイドミラー7,8あるいはインサイドミラー9に付設してある表示器10〜12を点灯または点滅表示させて、要警戒対象物4の存在を運転者に告知する。
(もっと読む)
複数カメラ画像処理装置及び複数カメラ画像表示装置
【課題】複数のカメラを用いて撮像した画像から視認性の向上した処理画像を生成、表示する複数カメラ画像処理装置及び複数カメラ画像表示装置を得る。
【解決手段】移動体の移動によって異なるカメラの撮像範囲が重複するように移動体の進行方向に沿って異なる位置に設置された複数のカメラ又は複数のカメラのうち1台のカメラを除いた他のカメラからの撮像画像を保存する画像一時記憶部4と、複数のカメラのフレームレートとそれぞれの設置位置及び、移動体の移動速度を基にして複数のカメラのそれぞれの撮像タイミングを制御するタイミング制御部3と、画像一時記憶部又は、画像一時記憶部と前記1台のカメラから撮像画像を読み込んで画像処理を行う画像処理部5とを備える。
(もっと読む)
カメラ情報表示装置及びカメラ情報表示方法
【課題】ズーム倍率に応じたカメラの視野範囲を直観的に且つ具体的に把握させる。
【解決手段】ネットワークカメラの設置場所に相当する上の平面見取図上の位置に、当該カメラの撮像方向とカメラ本体図形が示す撮像方向とを略一致させてカメラアイコン410a−410dを配置したマップ表示部401を表示し、ネットワークカメラの最大撮影角度を中心角にし、一定の径長を半径にした扇形状の最大撮影角図形SCと、ネットワークカメラのズーム倍率に応じて決定される現在撮影視野角を中心角にし、ズーム倍率に応じて異なる径長を半径にした扇形状の現在視野角図形ZSとを、平面見取図を透視可能なようにして、カメラアイコンに組み合わせて表示するようにした。
(もっと読む)
表示システム
【課題】システムの複雑化と高価格化を招くことなく、運転者の死角となる外界情景に係わる画像を高品質、且つ迅速に提供することが可能な表示システムを提供する。
【解決手段】移動体に搭乗した使用者の頭部または顔面に装着され、画像を表示し外界をシースルー可能な表示ユニットを有するHMDと、移動体に配され、使用者の死角となる外界情景を撮影する複数の移動体搭載カメラと、を備えた表示システムであって、HMDは、使用者の頭部の向きを検出する頭部向き検出部と、頭部向き検出部の検出結果に基づき、複数の移動体搭載カメラのうち少なくとも1つを選択する移動体搭載カメラ選択部と、を有し、移動体搭載カメラ選択部で選択された移動体搭載カメラで撮影された画像を、表示ユニットを通して観察できるシースルー画像に重ね合わせて表示する。
(もっと読む)
車両用周囲状況表示装置
【課題】車両周囲の映像から立体物を検出し、車両周囲の映像中の立体物をわかりやすく表示することを目的とする。
【解決手段】車両の前面、後面、右側面、左側面の少なくとも一面の左右に設けられ、該面に対向する方向を撮像する撮像部と、隣接する少なくとも二つの前記撮像部の撮像した映像に基づいて、前記映像中の立体物の画像を抽出し、前記映像における前記立体物の検出位置に前記立体物の前記画像を重畳する画像処理部とを備える。
(もっと読む)
撮影装置
【課題】スコープ部の細径化を妨げることなく、画像の全領域において合焦している画像を取得する。
【解決手段】照明光が照射された被写体の画像を、複数のピント位置の中から所定のピント位置で撮像する内視鏡装置において、制御部210は、第1のピント位置で撮像した第1の画像の各画素領域の明るさに基づいて、この画像のほぼ全領域において合焦しているか否かを判定し、この画像のほぼ全領域において合焦してはいないと判定した場合には、第1のピント位置とは異なる第2のピント位置で被写体の第2の画像を撮像させ、第1の画像内の合焦している領域と、第2の画像内の合焦している領域とを合成して、合成画像を生成する。
(もっと読む)
運転支援装置、運転支援表示の制御方法およびプログラム
【課題】ガイド線の設定を簡単に行ない、かつ設定結果が目視で容易に確認できること。
【解決手段】車両の幅および/または車両からの距離の目安としてのガイド線を車両の種別毎に保存しておき、車両の種別情報S2がたとえばECU(Engine Contorol Unit)30から入力されると、ガイド線を自動的に決定すると共に、ガイド線の表示位置を自動的に調節して出力する制御部を有するナビゲーションユニット10(運転支援装置)とする。
(もっと読む)
車両用周囲監視装置
【課題】死角領域の画像内の移動体の移動状況を把握し易い車両用周囲監視装置を提供する。
【解決手段】本発明による車両用周囲監視装置によれば、ドライバーから見て前方で左右に広がる領域内の死角領域を監視する車両用周囲監視装置であって、死角領域の実画像を撮像するように車両の前方部に設けられた実画像撮像手段2、4、6と、この実画像撮像手段により撮像された実画像内から移動体を抽出し、この移動体の移動状態を検出する移動体検出手段32と、この移動体検出手段で検出された移動体の仮想画像を生成する仮想画像生成手段38と、この仮想画像生成手段により生成された移動体の仮想画像を表示する位置及び大きさをその移動体の移動状態を表すように規定する仮想画像規定手段38と、移動体の仮想画像を仮想画像規定手段により規定される位置及び大きさで実画像に重畳して表示する表示手段26と、を有する。
(もっと読む)
車載映像提示装置及び映像提示方法
【課題】車両周囲の状況を撮影した映像の座標系を変換した場合であっても画質が良い映像を提示する。
【解決手段】演算部8が、変換後座標系における入力画素Pの分布状態に応じて変換後座標系の映像を生成する際に重み付け加算する入力画素Pの範囲を変化させる。このような処理によれば、十分な数の入力画素Pを用いて注目点Tの画素値を補間することができるので、車両周囲の状況を撮影した映像の座標系を変換した場合であっても画質が良い映像を提示することができる。
(もっと読む)
画像処理装置
【課題】追跡画像の途中の過程を表現する機能を容易に実現できる、画像のログ管理に適合した画像処理装置を提供する。
【解決手段】切り出し画像取得手段154bは、基準画像の矩形内の画素を切り出し、切り出した画素を、基準画像の矩形位置に対応する暗画像の、上記矩形位置座標データが示す座標位置に展開し嵌め込んで、切り出し画像を取得する。OR画像取得手段154cは、複数画面分の切り出し画像を、矩形が交差しない矩形部分について論理和をとり、矩形が重なる矩形部分について平均をとった一画面分のOR画像を取得する処理を行う。
(もっと読む)
車両画像処理装置
【課題】車両周辺の死角領域の画像を提供し、死角への不安感を軽減する。
【解決手段】運転者の視点位置近くに設けられた運転者視点カメラで、視点画像B0を取得し、車体外側に設けられた死角カメラで写した画像A0を、運転者視点カメラで撮影した場合の画像に基づき変換した変換外部画像A2を生成し、この視点画像B0から死角領域を除いた視認領域画像B1を生成する。視認領域画像B1に変換外部画像A2を合成して、死角領域部分を補った合成画像を得る。さらに、得られた合成画像に、車両形状を象徴する車両輪郭線6を合成する。
(もっと読む)
車両周辺画像処理装置及び車両周辺状況提示方法
【課題】 車両周辺に存在する立体物の状態を識別して当該立体物までの正確な距離を提示する。
【解決手段】 車両周辺を撮影する複数のカメラモジュール12と、各カメラモジュール12により撮像された画像を地面に投影した座標変換画像を合成して俯瞰画像を作成する画像変換部23aと、俯瞰画像に含まれる座標変換画像の境界線を跨いだ物体画像の状態に基づいて、車両周辺に存在する立体物の状態を識別する立体物識別部23bと、立体物の状態に基づいて、当該車両から立体物までの距離を演算する距離計算部23cと、車両から立体物までの距離に基づいて加工した俯瞰画像を表示する表示加工部23dとを備える。
(もっと読む)
車載用ワイヤレス画像受信装置とワイヤレス画像伝送装置、ワイヤレス画像通信システム
【課題】車外に設置したカメラから得られる画像を、必要に応じて自動的にモニタに表示可能なワイヤレス画像伝送装置等を提供することを目的とする。
【解決手段】車両と別個に設置される撮像手段が、車両の識別情報を受信して無線送信する撮像画像データを受信する受信手段と、車両の識別情報を発信する識別情報発信手段と、受信手段が撮像画像データを受信すると、撮像画像データの画像の表示を開始する表示手段とを備える車載用ワイヤレス画像受信装置とする。
(もっと読む)
画像生成装置および画像表示システム
【課題】老化などにより、利用者ごとにばらつき(個人差)が生じている利用者の視覚能力に応じて、表示手段に表示させる画像を色補正することができる画像生成装置および当該画像生成装置を備える電子ミラーシステムを提供する。
【解決手段】本発明の画像処理装置は、基準色に対する利用者の色の見え方に関する色視認情報を用いて決定された色補正情報を用いて、前記利用者に表示させる画像を補正する補正手段を備えることを特徴とする。これにより、表示手段に表示される画像を通じて、実際の色の変化を利用者の色感覚に合わせることが可能となる。
(もっと読む)
画像処理装置、画像処理方法
【課題】 仮想物体の画像が現実物体を隠蔽してしまうような状況下においても、複合現実空間への没入間を損ねることなく、係る現実物体の存在をユーザに知らしめるための為の技術を提供すること。
【解決手段】 CPU1001は、特定部位の位置姿勢情報に基づいて動作部位面を配置し、特定部位を接触させる対象の動作補助物体を配置する。そしてCPU1001は、動作部位面、動作補助物体が配されている仮想空間の画像を生成し、HMD100に送出する。その際、CPU1001は、動作部位面と動作補助物体との位置姿勢関係情報を求める。そして求めた位置姿勢関係情報が、動作部位面が動作補助物体に接触する直前の状態におけるそれぞれの位置姿勢関係を示している場合、動作補助物体の表示形態を切り替える為に、動作補助物体のデータを操作する。
(もっと読む)
画像配信システム
【課題】特定した個人のみの映像をその映像の入手を希望する特定の人に配信する画像配信システムを提供する。
【解決手段】画像撮影手段11は、複数の人が存在しうる場所に設置され、場所の所定の範囲を撮影する。画像撮影手段により撮影された撮影画像信号が入力され、撮影画像信号に少なくとも1人の人の画像が存在する場合には、画像撮影手段から入力された撮影画像信号から少なくとも1つの人画像信号を検出する人検出手段と、人検出手段から人画像信号が入力され、人画像信号における人の特徴から人画像信号における人の個体を識別する個人識別手段と、個人識別手段からの識別信号が入力され、予め定められた設定識別信号と識別信号が一致しない場合には、撮影画像信号のうち一致しない識別信号における人の画像を人が特定できないように撮影画像信号を処理するマスク処理手段とを備える。
(もっと読む)
画像処理装置
【課題】観察者の死角となる範囲の画像を適切に生成することが可能な画像処理装置を提供する。
【解決手段】第1カメラ150−1は第1の範囲に対応する第1画像を撮影し、第2カメラ150−2は第2の範囲に対応する第2画像を撮影する。制御部102は、第1画像から物体300の画像を抽出し、当該画像を運転者400の視点位置と物体300との距離と、第1カメラ150−1と物体300との距離とによって定まる倍率で拡縮する。更に、制御部102は、第2画像から背景画像を抽出して、第1画像に背景画像を重畳し、更に当該背景画像に拡縮物体画像を重畳することで合成画像を生成する。
(もっと読む)
201 - 220 / 440
[ Back to top ]