
Fターム[5C084DD14]の内容
盗難警報装置 (32,143) | 検知手段 (4,208) | 電気的 (2,298) | 画像(テレビカメラを含む) (878) | 赤外 (110) | 近赤外 (12)
Fターム[5C084DD14]に分類される特許
1 - 12 / 12
目標物管理装置および目標物管理方法
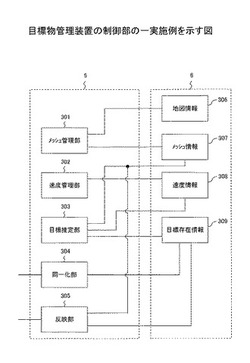
【課題】本発明は、目標物が存在する可能性のある区域を精度よく推定する目標物管理装置および目標物管理方法を提供する。
【解決手段】監視対象範囲を一定の区域からなるメッシュに区切り、管理するメッシュ管理部と、探知した目標物の情報を有する探知情報を用いて、目標物の存在するメッシュを決定し、時間経過に応じて目標物の存在する目標存在メッシュを推定する目標推定部と、目標物と新たに入力された探知情報に含まれる目標物が同一であるかを判定し、目標存在メッシュを更新する同一化判定部と、目標物がない地域を示す否定情報を受信すると、地域に対応する目標物がないメッシュを前記目標存在メッシュに反映し、反映した目標存在メッシュを更新する反映部と、を備えることを特徴とする目標管理装置である。
(もっと読む)
車載カメラ制御装置、車載カメラ制御システム及び車載カメラシステム

【課題】 車両の走行状況に応じて異なる処理を行うことが可能な車載カメラ制御装置、車載カメラ制御システム及び車載カメラシステム等の提供。
【解決手段】 車載カメラ制御装置100は、赤外線画像データを赤外線画像撮像部210から取得する画像取得部110と、赤外線画像データに基づく処理を行う処理部120と、外部機器300との通信処理を行う通信部140と、車両が走行状態か否かを判定する走行状態判定部130と、を含む。そして、処理部120は、車両が走行状態であると判断された場合に、赤外線画像データに基づく画像処理を行う。さらに、通信部140は、車両が非走行状態であると判断された場合に、赤外線画像データ又は赤外線画像データに基づく検出情報を、外部機器300に送信する。
(もっと読む)
放火抑止システム
【課題】
防護対象の建造物、特に重要文化財では、人の出入りを特に制限していない敷地へ夜間に訪れる者もおり、放火防止目的で人体センサを設け、その作動によって警報したり威嚇するような装置を設けると、善意の訪問者を検知しただけで警報したり威嚇してしまうような好ましくないことが起こる上、近隣への騒音問題も起こしかねない。また、放火されてしまってから警報するのでは守るべき建造物に何らかの被害が発生する。
【解決手段】
人体センサの作動で警戒モードへ移行してカメラと照明とを起動するとともに音響出力部を起動して監視を開始したことを告げる威嚇しない音響を出力し、炎センサ作動で威嚇モードへ移行して照明と音響とで威嚇し、威嚇モードが所定時間継続したときは放火阻止モードへ移行して点火された火種を消火して建造物への着火を阻止する放火抑止システムとする。
(もっと読む)
撮像装置および監視装置
【課題】常に監視対象を容易かつ迅速に認識することができる撮像装置および監視装置を提供すること。
【解決手段】可視領域または近赤外領域で被写体を撮像する光軸C1を有した近赤外線カメラ10と、遠赤外領域で被写体を撮像する光軸C1に平行な光軸C2を有し近赤外線カメラ10に隣接配置された遠赤外線カメラ20と、近赤外線カメラ10のズーム機能と遠赤外線カメラ20のズーム機能とを連動させて同じ視野角をもたせ、近赤外線カメラ10が撮像した近赤外画像および遠赤外線カメラ20が撮像した遠赤外画像を同時に取得させる撮像制御部31と、撮像制御部31が取得した近赤外画像と遠赤外画像とを同一の出力部50画面上に切替出力させる外部出力制御部36と、を備える。
(もっと読む)
画像監視装置
【課題】監視領域内に検出対象物体と類似する物体が存在する場合でも、その類似物体を検出対象物体として誤検出することを防止可能な画像監視装置を提供する。
【解決手段】画像監視装置1は、監視領域を撮影した監視画像を取得する画像入力部2と、検出対象物が存在しない状況において監視領域を撮影した背景画像を記憶する記憶部3と、監視画像及び背景画像の所定領域における検出対象物らしさの度合いを算出する識別器(300、500)を有し、その識別器により、画像入力部2により取得された監視画像の所定領域についてのその度合いを信頼度として算出し、かつ、その識別器により、監視画像の所定領域に対応する背景画像の所定領域についてのその度合いを類似度として算出する識別部52と、信頼度と類似度との相対関係により、監視領域内に検出対象物が存在するか否かを判定する判定部53とを有する。
(もっと読む)
画像センサ
【課題】監視領域に侵入した侵入物体を検出するとともに、監視領域内に存在する植栽の揺れによる誤報を防止できる画像センサを提供する。
【解決手段】画像センサ2は、監視領域を撮影した赤色画像を含むカラー画像と近赤外画像とを同時に取得する撮像部22と、赤色画像及び近赤外画像の各画素の輝度値から植物確信度を算出し、その植物確信度が所定の閾値以上となる画素の集合を植栽領域として抽出する植物確信度算出手段211と、監視領域のカラー画像または近赤外画像と基準画像の差分によって変化領域を抽出する変化領域抽出手段212と、変化領域について、侵入物体属性度を算出する侵入物体属性度算出手段214と、変化領域に占める植栽領域と重なった領域の割合が大きいほど高い値となる外乱属性度を算出する外乱属性度算出手段213と、侵入物体属性度及び外乱属性度に基づいて変化領域が侵入物体か否かを判定する判定手段215とを有する。
(もっと読む)
画像センサ
【課題】監視領域の明るさによらず、良好な精度で監視領域への侵入物体を検出できる画像センサを提供する。
【解決手段】画像センサ2は、監視領域を撮影したカラー画像と近赤外画像とを同時に取得する撮像部22と、カラー画像と近赤外画像の両方を用いて侵入物体を検出する明時物体検出手段213と、近赤外画像のみを用いて侵入物体を検出する暗時物体検出手段214と、監視領域の照度がカラー画像を侵入物体の検出に利用できる明るさであると判定したときは明時物体検出手段213に侵入物体を検出させ、一方、監視領域の照度がカラー画像を侵入物体の検出に利用するには不十分な明るさであると判定したときは暗時物体検出手段214に侵入物体を検出させる処理選択手段211とを有する。
(もっと読む)
暗所における監視方法と監視装置
【課題】低コストで複数の監視対象物を同時にかつ容易に監視することができる暗所における監視技術を提供する。
【解決手段】暗所における複数の監視対象物40を、赤外線CCDカメラ10、画像処理を行う処理装置(パーソナルコンピュータ)20および監視対象物40に貼着するマーク30を用いて同時に監視する。複数の監視対象物40に、近赤外線を反射させるマーク30をそれぞれ貼着しておき、赤外線CCDカメラ10により、近赤外線を複数の監視対象物40に貼着した前記マーク30に照射し前記マーク30からの反射光を受光する。処理装置20は、赤外線CCDカメラ10が受光したマーク30の情報を画像情報として受信し、その画像情報を処理して監視対象物40の存在の有無を判断する。
(もっと読む)
組合せセンサシステム
【課題】屋外で使用する場合でも、センサ部への妨害行為を正確に判定できる組合せセンサシステムを提供する。
【解決手段】第1のセンサ(MWセンサ)3と第2のセンサ(PIRセンサ)4とを備えたセンサ部1と、前記第1のセンサ3からの第1検出信号d1に基づいて人体Pの移動距離M1を検出する移動距離検出回路21と、前記第1検出信号d1に基づいてセンサ部1から人体Pまでの距離D1を検出する距離検出回路20と、検出された前記移動距離M1が所定移動距離M0以上で、かつ、検出された前記距離D1が所定距離D0以下であるとき、妨害行為があったと判定して妨害検出信号a2を出力する妨害判定回路22とを有している。
(もっと読む)
防犯センサ
【課題】
距離情報と大きさ情報とを同時に取得できて、検知精度を向上させると共に情報処理を容易に行うことができ、かつセンサの小型化が図れてコスト的に有利な防犯センサを提供する。
【解決手段】
警戒エリア内に存在する物体までの距離と該物体の大きさとを同時に測定可能な距離画像センサと、該距離画像センサで得られた距離画像の距離情報と大きさ情報とに基づき、物体が人体より大きいか人体より小さいかを区別して侵入者か否かを判定する判定手段と、を備える。距離画像センサは、投光手段から投光された光の反射光を受光手段で受光することによって得られた距離画像の全画素について距離測定を行い、また、背景光を除去可能なCMOS撮像素子によって形成される。
(もっと読む)
侵入者監視方法および装置
【課題】
本発明の目的は監視対象範囲への侵入者監視を行うセキュリティシステムを低コストで構成できる侵入者監視方法および装置を提供することにある。
【解決手段】
1台の監視カメラ1の両側に監視カメラ1を中心として対称位置となるように一対の照明手段2R、2Lを配置する。視差演算部8は一方の照明手段2Rの光照射時に撮像した第1侵入者画像と他方の照明手段2Lの光照射時に撮像した第2侵入者画像との照明視差を求める。距離演算部9は照度視差に基づいて監視カメラ1から侵入者までの距離を算出する。
(もっと読む)
画像認識による小動物識別方法および小動物識別装置
【課題】カメラで撮像した画像データを画像認識手段により、侵入者、小動物、昆虫等の判断が出来る、小動物識別方法および小動物識別装置の提案を目的とする。
【解決手段】カメラなどの撮像手段1、画像記憶手段3、認識対象画区を設定する画区設定手段4、背景画像データ31と現監視画像データとの差分画像データを演算出力する差分演算手段5、予め登録記憶された閾値に基づき異常形状を抽出する異常形状抽出手段6、異常形状の床面への接地位置を検出する下端接地位置検出手段7、形状寸法を補正演算し実形状データを抽出する実形状抽出手段9、該実形状データおよび下端接地位置検出の可否データなどより侵入物体の種類を判断する侵入物体判断手段11、および、侵入物体判断手段の判断条件を記憶している判断条件メモリ10とで構成する。
(もっと読む)
1 - 12 / 12
[ Back to top ]