
Fターム[5C122FC04]の内容
スタジオ装置 (397,422) | 撮像素子(撮像管を含む) (13,018) | 複数の撮像素子を持つもの (446)
Fターム[5C122FC04]の下位に属するFターム
仕様/特性の異なる複数の撮像素子 (95)
Fターム[5C122FC04]に分類される特許
81 - 100 / 351
複眼撮像装置
【課題】レンズへの指掛りの有無にかかわらず、良好な3D画像を撮像することができる複眼撮像装置を提供する。
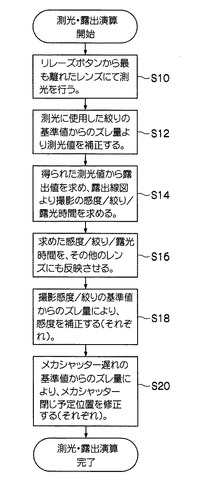
【解決手段】カメラ本体の長手方向の位置に配設され、互いに視差を有する2つの画像を撮像する2つの撮像部のうち、レリーズボタンから最も離れた撮影レンズを有する撮像部を基準の撮像部とする。AE検出部、AF検出部又はAWB検出部は、それぞれ基準の撮像部を介して取得される画像信号に基づいて被写体の明るさを測光し、AF評価値を算出し、又はホワイトバランスゲインを求める。そして、前記検出した検出結果を他の撮像部でのAE制御、AF制御又はAWB補正に適用する。
(もっと読む)
画像処理装置およびプログラム

【課題】Linear-Log特性を持つ複数のセンサ出力を受けて画像処理を行う画像処理装置において、複数センサ間で最適な変曲点を指定する技術を提供する。
【解決手段】画像処理装置は、撮像部2から出力される複数の画像信号のそれぞれの特徴量を抽出する特徴量抽出部363と、当該複数の画像信号の特徴量に基づいて、所定の条件を満足する共通変曲点を決定し、当該複数の撮像素子を制御することにより、当該複数の撮像素子のそれぞれの当該変曲点を当該共通変曲点に統一する変曲点制御部366とを備える。
(もっと読む)
ラインセンサカメラおよびこれを備えた撮像装置
【課題】表面の凹凸を有する撮像対象物を鮮明に撮像することができるラインセンサカメラおよびこれ備えた撮像装置を提供することを課題とする。
【解決手段】本発明のラインセンサカメラ10は、対物レンズ24と、対物レンズ24の結像深度内に配設され、複数の撮像素子29から成るラインスキャンセンサ28をスキャン方向に複数組連設した撮像部27と、を備え、複数組のラインスキャンセンサ27は、相互の結像位置が異なるように配設されていることを特徴とする。
(もっと読む)
撮像装置および表示方法
【課題】ユーザに違和感を与えない画像や映像を提示できる撮像装置を提供する。
【解決手段】入力された画像から被写体に含まれる人物の顔を検出する顔検出部14と、顔検出部で検出された顔と撮像装置との距離を測定する距離測定部15と、距離測定部で測定された距離に応じて顔検出部で検出された顔に対する指標を異ならせ、その指標を前記画像の前記顔の位置に付加する顔指標付加部16と、顔指標付加部で指標が付加された顔の画像を表示する画像表示部18とを備える。
(もっと読む)
立体撮像装置
【課題】撮影シーンに適した立体画像を得ることが可能な立体撮像装置を提供する。
【解決手段】第1の撮像手段11Rおよび第2の撮像手段11Lは、単一の撮影光学系12R,12Lの瞳の異なる領域を通過した光束を画素群毎にそれぞれ光電変換する複数の画素群を含む単眼3Dセンサ16R,16Lを有し、LSI40Mは、第1の撮像手段11Rにより得られた視点画像と第2の撮像手段11Lにより得られた視点画像とを立体画像としてメディア54に記録する複眼立体撮影の機能と、第1の撮像手段11Rおよび第2の撮像手段11Lのうち一方の撮像手段(例えば11R)により得られた複数の視点画像を立体画像としてメディア54に記録する単眼立体撮影の機能とを有する。
(もっと読む)
半導体装置
【課題】入射光の強度によらず、高精度な撮像データを取得する半導体装置とする。
【解決手段】画素に設けられた第1のフォトセンサと、画素の周辺に設けられた第2のフォトセンサと、第2のフォトセンサで取得された外光強度に応じて、第1のフォトセンサの駆動条件を設定するコントローラと、を有し、コントローラで設定された駆動条件に応じて、第1のフォトセンサの感度を変更した後に撮像を行う半導体装置とする。これにより、半導体装置は、入射光の強度に応じて感度を最適化した第1のフォトセンサを用いて、撮像を行うことができる。
(もっと読む)
複眼撮影装置及びプログラム
【課題】簡易な構成で、立体視表示のための画像を撮影することができるようにする。
【解決手段】被写体との距離が近い場合、レリーズボタンが全押し操作されると(120)、一方の撮影部により左画像を取得する(122)。左画像に対して半透明処理を行い(124)、左画像と右画像との間における視点の最適な移動距離を算出する(126)。半透明処理された左画像と算出された最適な移動距離とを、液晶モニタのスルー画像上に重畳させて表示させ(128)、現在のスルー画像と取得した左画像とについて、被写体領域の相関係数と背景領域の相関係数とを算出する(130)。算出された被写体領域の相関係数が、第1閾値以上であり、かつ、背景領域の相関係数が、第2閾値以下であるか否かを判定し(132)、閾値判定が肯定されると、一方の撮影部により右画像を取得する(134)。
(もっと読む)
パノラマ画像撮像装置及びそのパノラマ画像合成方法
【課題】カメラをパンさせて撮影するだけで、高精度のパノラマ画像が撮影される様にする。
【解決手段】主目的とする被写体を撮影する第1撮影部1と、第1撮影部1と異なる方向の画像を撮影する第2撮影部2と、第1撮影部1及び第2撮影部2を同時並行に駆動して第1撮影部1及び第2撮影部2に各々連続する少なくとも2枚の画像を撮影させる駆動制御手段15と、第2撮影部2が撮影した前記2枚の画像から該2枚の画像間の移動距離を算出し該移動距離に基づいて第1撮影部1が撮影した前記2枚の画像をパノラマ合成するパノラマ合成手段26とを備える。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム、及び複眼デジタルカメラ
【課題】誤補正を抑制し、精度の高い視差マップを生成する。
【解決手段】左画像と右画像とを左画像を基準としてステレオマッチングにより対応させて視差マップを生成する。視差マップ上に注目画素を設定し、注目画素に対応する左画像上の画素(左画像注目画素)を中心とした所定サイズのウインドウを左画像に設定し、ウインドウ内に含まれる画素のうち、左画像注目画素のRGB値と近いRGB値を持つ画素を抽出し、抽出された画素の各々に対応する視差マップ上の画素の各々の視差を視差ヒストグラムにエントリして視差ヒストグラムを生成する。注目画素の頻度が所定値未満の場合には、視差ヒストグラムの最頻値の視差で、注目画素の視差を補正する。
(もっと読む)
剛性のある多方向撮像束および剛性のある多方向撮像束を組み込んでいる撮像アセンブリ
【課題】歪みが最小限である複数の画像を単一の平面検出器アレイに同時に伝達する自立的な多方向撮像アセンブリを提供する。
【解決手段】多方向撮像アセンブリは、2つ以上の剛性のある画像伝導分岐素子を有する多方向撮像束を含む。各分岐素子は、複数の面の間に相対する画像入力面および画像出力面と1つ以上の屈曲部とを有する。分岐素子は、画像入力面が異なる方向を向き、画像出力面が一致して共通の画像出力面を定義するように結束されている。集束素子によって定義される視野と相関する空間領域の画像が取得され、分岐素子を通じて伝導され、共通の画像出力面を通じて出力される画像が、画像検出器アレイに光学的に伝達される。画像検出器アレイは、単一の広視野画像を再現する合成画像を作成するために、複数の画像の間で冗長な内容を除去する画像の画質改善アルゴリズムを含むデータ処理システムに通信可能にリンクされている。
(もっと読む)
被写体の追尾装置およびその動作制御方法
【目的】追尾対象の被写体を正確に追尾する。
【構成】立体的な被写体像60から,被写体の視差を画素単位で表す視差マップ画像が生成される。生成された視差マップ画像から,追尾対象の被写体である歩行者61よりも手前にある被写体が除外されるように検出範囲が決定される。決定された検出範囲において,追尾対象である歩行者61が見つけられる。歩行者61よりも手前のバイクの搭乗者62を誤って追尾してしまうことを未然に防止できる。
(もっと読む)
画像処理装置及びこれを備えた撮影装置、並びに画像処理方法
【課題】複数の視点画像に適した画像記録形式を決める。
【解決手段】撮影モードでレリーズボタン18を全押しすると、視差分布算出部71は、バッファメモリ52,54から読み出した左右視点画像データにおいて共通する複数の特徴点を抽出して、複数の特徴点それぞれの視差量を算出し、分散視差量を算出する。記録形式判定部72で、算出分散視差量≦設定分散視差量であると判定されると、CPU50は、左視点画像データ及びコメント画像81、左右視点画像データ及びコメント画像82、立体画像及びコメント画像83を順にLCD20に表示する。次に、CPU50は、左視点画像データ、コメント画像84a、認証画像84b及び非認証画像84cをLCD20に表示する。単視点画像記録が認証されると、左視点画像データが圧縮・伸長部85により圧縮されて単視点画像ファイル95が作成され、単視点画像ファイル95がRAM78に記録される。
(もっと読む)
擬似大型撮像素子の製造方法および製造装置
【課題】複数の撮像素子を配列・搭載して疑似的に大型撮像素子を形成する際に、撮像素子毎に反りの具合が異なることにより、形成された大型撮像素子の撮像面の高さが大きくばらつく。
【解決手段】撮像素子3の撮像面の複数点の高さを計測し、それに基づいて撮像素子の反りやうねりの平均化された仮想平面VPを算出する。撮像素子3を、その仮想平面が設定された搭載高さSHとなるように、実装基板1上に接合部材(接着剤等)2を介して搭載する。
(もっと読む)
撮像装置、警告方法、および、プログラム
【課題】ステレオカメラでのより効率的な撮影を実現する。
【解決手段】撮像制御部212は、第1撮像部110による撮像画像と第2撮像部120による撮像画像のいずれかをファインダ画像として表示部310に表示する。特徴検出部213は、第1撮像部110による撮像画像と第2撮像部120による撮像画像の双方で、輝度値の分布もしくは輝度分散を算出することで、各撮像画像の特徴を検出する。同一性判別部214は、検出された特徴に基づいて、両画像間の同一性を判別し、大きく異なる場合、いずれかの撮像画像上に、障害物の写り込みなどの異常が発生していると判別する。異常が発生していると判別された場合、警告処理部215は、両画像を同時に表示部310で表示させたり、異常が発生している画像をファインダ画像として表示部310に表示させたりすることで、異常の発生を撮影者に認識させる。
(もっと読む)
撮像装置、表示方法、および、プログラム
【課題】パターン投影を伴う撮影をより効率的におこなう。
【解決手段】3Dモデリングを目的とした撮像をおこなう際、ファインダ用撮像時にパターン投影部130でパターン投影をおこなう。パターン表示処理部213は、撮像画像を複数のエリアに分割し、エリア毎にヒストグラムを作成する。各ヒストグラムから二値化する際の分離度に基づいて、パターンを視認しやすいエリアの候補を選択する。さらに、選択されたエリアの白黒比を求め、投影しているパターンの白黒比と近いものを選択可能に表示部310に表示する。撮像制御部212は、撮影者によって選択されたエリアが合焦するよう第1撮像部110と第2撮像部120を動作させ、3Dモデリングデータの生成に供する撮像画像を取得する。
(もっと読む)
立体物識別装置、並びに、これを備えた移動体制御装置及び情報提供装置
【課題】撮像画像中の輝度に明確な違いがない立体物と平面物体との間を、撮像手段を用いて高い精度で識別することを課題とする。
【解決手段】撮像領域内に存在する立体物を識別する立体物識別装置であって、物体からの反射光に含まれている偏光方向が互いに異なる2つの偏光(P偏光とS偏光)を受光してそれぞれの偏光画像(P偏光画像とS偏光画像)を撮像する偏光カメラ10と、画素ごとにP偏光画像とS偏光画像との間における輝度差分値の輝度合計値に対する比率である差分偏光度を算出する差分偏光度画像処理部15と、この差分偏光度を用いて撮像領域内の物体が立体物であるか否かの立体物識別処理を行う立体物識別部18とを有する。
(もっと読む)
ズレ補正装置、ズレ補正装置を備える3次元デジタルカメラ、ズレ補正方法及びズレ補正プログラム
【課題】2つの光学系と撮像素子を備えた3次元デジタルカメラにおいて、左右の画像の画角のズレを小さくすることができるズレ補正装置を提供すること。
【解決手段】ズレ補正装置は、被写体像を撮像して画像信号を出力する2つの撮像素子(7a,7b)と、2つの撮像素子(7a,7b)を各々固定して接続する2つの撮像素子補正ステージ(8a,8b)と、2つの撮像素子(7a,7b)により撮像される各撮影画像における画角中心のズレを検出する画角中心ズレ検出部(20)と、画角中心ズレ検出部(20)により検出されたズレ量に応じて、撮像素子補正ステージ(8a,8b)によって固定して接続された2つの撮像素子(7a,7b)のうち少なくとも一方を所定の方向に移動させて撮像素子(7a,7b)により撮像される撮影画像の画角中心のズレを補正するカメラ制御部(37)と、を備える。
(もっと読む)
カメラモジュール
【課題】広い視野を持つ画像を安定して得られ、かつ薄型化を可能とするカメラモジュールを提供すること。
【解決手段】撮像素子と、撮像素子へ光を取り込む撮像光学系である撮像レンズ3とを備え、被写体像を撮像する二以上のサブカメラモジュール2と、被写体像の位置合わせのためのブロックマッチング処理を実施するブロックマッチング手段と、を有し、二以上のサブカメラモジュール2は、撮像光学系の光軸の向きを互いに異ならせた配置をなして固定され、ブロックマッチング手段は、撮像光学系によるイメージサークル同士が重畳する部分において、サブカメラモジュール2ごとの被写体像を合致させる。
(もっと読む)
撮影装置
【課題】高品質な2D用の動画と3D用の動画を撮影できる撮影装置を提供する。
【解決手段】選択的に2D動画と3D動画の撮影が可能なデジタルカメラ10において、2D動画を撮影する場合には、2D動画撮影用に設定された周期で露出制御を行い、3D動画を撮影する場合には、3D動画撮影用に設定された周期(MPEG圧縮のIフレーム用の画像を撮影するタイミングに同期した周期)で露出制御を行う。
(もっと読む)
撮像装置
【課題】複数の光学系を有効に利用することができる撮像装置を提供すること。
【解決手段】第1光学系による対象の像を撮像する第1撮像部と、前記第1光学系とは異なる第2光学系による前記対象の像を撮像する第2撮像部と、前記第1撮像部によって撮像される画角を小さくした場合に前記第2撮像部によって撮像される画角を大きくする制御を行い、前記第1撮像部によって撮像される画角を大きくした場合に前記第2撮像部によって撮像される画角を小さくする制御を行う制御部と、を具備する撮像装置。
(もっと読む)
81 - 100 / 351
[ Back to top ]