
Fターム[5F031GA09]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送装置、手段 (13,292) | 保持部 (5,617) | フォーク (2,669) | フォーク上でのウエハ等の固定機構 (801) | 静電吸着 (66)
Fターム[5F031GA09]に分類される特許
1 - 20 / 66
エネルギー線照射装置及びワーク搬送機構
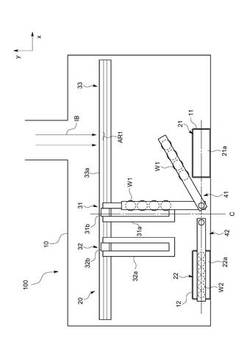
【課題】エネルギー線照射システムにおいて、異なる寸法のワークに効率的にエネルギー線を照射できるコンパクトで低コストの搬送機構を実現する。
【解決手段】異なる寸法のワークW1、W2がそれぞれ搭載される第1、第2ワークホルダ31a、32aと、各々のワークホルダを各々のワーク授受領域とエネルギー線照射領域AR1との間で進退移動させる進退機構33と、互いに異なる位置に設けられた第1及び第2ワーク収容部21a、22aと、第1のワーク授受領域にある第1ワークホルダ31aと第1ワーク収容部21aとの間でワークW1を搬送する第1搬送アームと、第2のワーク授受領域にある第2ワークホルダ32aと第2ワーク収容部22aとの間でワークを搬送する第2搬送アームとを設けた。
(もっと読む)
ウエーハカセット

【課題】カセット載置テーブルを引き出し及び収納する動作でウエーハカセット内のウエーハが飛び出さないようにすることを目的とする。
【解決手段】ウエーハカセット1は、対向する側板2にウエーハ10を収容する収容溝3が複数形成され、収容溝3は、ウエーハ10が収容される収容領域30と、ウエーハ10を収容領域30に収容する為のガイドの役割となる案内領域31と、から構成され、収容領域30より案内領域31を厚くして段差h3を形成している。そのため、ウエーハカセット1が載置された状態のカセット載置テーブルを引き出し及び収納する動作により、ウエーハ10がウエーハカセット1内から飛び出そうになっても、ウエーハ10の外周10bが案内領域31に形成された段差h3に接触するため、ウエーハ10がウエーハカセット1から飛び出すことを防止できる。
(もっと読む)
被吸着部材の供給方法及び装置
【課題】非磁性金属板等の被吸着部材をコンベアに正確に供給する。
【解決手段】被吸着部材(a)を吸着してコンベア(2)に垂直状態で受け渡し、被吸着部材(a)をコンベア(2)の把持部(6)に把持させる被吸着部材の供給方法において、被吸着部材(a)の吸着に静電チャック部材(9)を用い、この静電チャック部材(9)に電圧を印加することより静電チャック部材(9)で被吸着部材(a)を吸着して上記コンベア(2)の把持部へと送り、被吸着部材(a)が上記コンベア(2)の把持部で把持された直後に電圧の印加を解除して被吸着部材(a)を解放させるようにした。
(もっと読む)
シートビーム式検査装置
【課題】 ウェハを確実に吸着保持する静電チャックを提供すること。
【解決手段】 ウェハを静電的に吸着保持する静電チャック1410は、基板1405、電極1412板及び絶縁層1404を重ねて成り、ウェハの印加電圧が0ボルトから所定電圧まで時間とともに増大又は減少されるのに連動する電圧を静電チャックの電極板に印加することにより、ウェハとチャックの間に吸引力を発生する。
(もっと読む)
基板ホルダ、基板貼り合せ装置、積層半導体装置製造方法及び積層半導体装置
【課題】基板ホルダの識別情報を管理して、基板貼り合せ装置の故障を防止する。
【解決手段】複数の基板を貼り合わせる基板貼り合わせ装置であって、複数の基板をそれぞれ保持し、固有の識別情報が割り当てられた複数の基板ホルダと、前記複数の基板ホルダに保持された前記複数の基板を貼り合わせる貼り合わせ部と、前記複数の基板ホルダに割り当てられた前記識別情報を認識する認識部と、前記認識部により認識された識別情報が重複する場合に、その旨を出力する出力部とを備える基板貼り合わせ装置が提供される。
(もっと読む)
半導体デバイス製造装置
【課題】ウエハの分子接着モジュールを備える製造装置でアライメント制度が十分で、層歪みが低減された製造装置を提供する。
【解決手段】この装置は、大気圧未満の圧力のもとでウェハの接着を行うための真空チャンバを備える接着モジュール1と、接着モジュール1に接続され、且つ接着モジュール1へのウェハ移送のために構成され、且つ第1の真空ポンプデバイス5に接続されている装填ロックモジュール2と、を具備し、第1の真空ポンプは、装填ロックモジュール2内の圧力を大気圧未満に低減するように構成されている。
(もっと読む)
プラズマ処理装置
【課題】試料の搬送中に試料温度の測定を可能とし、測定した試料の温度に応じて試料の搬送を制御して搬送効率の低下を抑制する。
【解決手段】搬入された試料に所定のプラズマ処理を施すプロセスモジュール110と、カセットに格納された試料を取り出して前記プロセスモジュールに搬入し、プロセスモジュールにおいてプラズマ処理が施された試料を前記カセットに収納する搬送モジュール101を備えたプラズマ処理装置において、前記搬送モジュールは、試料を静電吸着する静電吸着部および吸着した試料の温度を測定する温度測定部を具備する搬送ロボット108と、搬送モジュールを制御するモジュールコントローラ113を備え、測定した試料の温度をもとに前記静電吸着部の吸着力を推定し、推定した吸着力をもとに搬送ロボットに許容される最大加速度を計算し、計算結果にしたがって搬送制御する
(もっと読む)
移動体装置、露光装置、デバイス製造方法、及びフラットパネルディスプレイの製造方法
【課題】ストッパにより移動が制限された移動体をストッパから離間させる。
【解決手段】 ステージ復帰装置70は、ステージ装置20をストッパ50から離間させる方向に駆動するエアジャッキ72を有している。エアジャッキ72に供給されるエアの制御は、メカニカルバルブ73のスプール78bの操作により行われる。スプール78bは、X粗動ステージ23Xが有するカムフォロア90a、90bに機械的に係合可能なカム89a、89bを有するレバー86を含むバルブ操作機構74により操作される。これにより、例えばX粗動ステージ23Xの位置を検出するための電気的なセンサ類、メカニカルバルブ73を操作するための電動アクチュエータ、上記センサ類、電動アクチュエータなどを制御するための制御系などを必要としない。従って、構成が簡単で低コストである。
(もっと読む)
真空充填装置及びその制御方法
【課題】タクトタイムを短くして生産効率を向上させることのできる真空充填装置及びその制御方法を提供する。
【解決手段】投入側サブチャンバー10とメインチャンバー20とを連通する第1連通口11aと、第1連通口11aを開閉可能な第1ゲート15と、第1ゲート15を制御可能なエアシリンダ16、17と、第1搬送用テーブル14にセットされたワークピースWを投入側サブチャンバー10からメインチャンバー20に搬入する3段スライダー13とを有している。また、排出側サブチャンバー30とメインチャンバー20とを連通する第2連通口31aと、第2連通口31aを開閉可能な第2ゲート35と、第2ゲート35を制御可能なエアシリンダ36、37と、第2搬送用テーブル34上のワークピースWをメインチャンバー20から排出側サブチャンバー30に搬出する3段スライダー33とを有している。
(もっと読む)
基板位置合せ装置、基板貼り合せ装置、積層半導体装置の製造方法及び積層半導体装置
【課題】基板位置合せ過程の時間を短縮する。
【解決手段】一の基板を保持する第1のテーブルと、他の基板を保持する第2のテーブルと、第1のテーブルに保持された一の基板の表面に設けられた指標を観察する第1の顕微鏡と、第2のテーブルに保持された他の基板の表面に設けられた指標を観察する第2の顕微鏡と、一の基板における複数の指標のうちの最初の指標から最後の指標を観察するまでの観察時間と、他の基板における複数の指標のうちの最初の指標から最後の指標までの観察時間とが少なくとも一部重なるように制御し、第1の顕微鏡による一の基板の指標の観察結果および第2の顕微鏡による他の基板の指標の観察結果に基づいて、一の基板と他の基板とを位置合わせする制御部とを備える基板位置合せ装置が提供される。
(もっと読む)
駆動装置及び接合装置
【課題】内部雰囲気が真空且つ高温の処理容器内で被駆動体を適切に移動させる。
【解決手段】駆動装置115は、処理容器70を貫通するシリンダ120を有している。シリンダ120の外周面には、支持部114を支持する外側ハウジング130が設けられている。外側ハウジング130の内周面には外側マグネット131が取り付けられている。シリンダ120の内周面には内側ハウジング140が設けられている。内側ハウジング140の外周面には内側マグネット143が取り付けられている。外側マグネット131と内側マグネット143は、対向して配置され且つ異なる極性を有している。外側マグネット131とシリンダ120との間及び内側マグネット143とシリンダ120との間には、所定の隙間が形成されている。処理容器70の外部には、内側ハウジング140を移動させる駆動部180が設けられている。
(もっと読む)
搬送装置および基板接合装置
【課題】搬送する基板の温度を安定させる。
【解決手段】素子を形成された基板を搬送する搬送装置であって、基板を搭載する複数の搭載部と、複数の搭載部の温度を個別に測定する測温部と、測温部の測定結果に応じて、複数の搭載部のいずれかを選択して基板を搭載させる制御部とを備える。上記搬送装置において、測温部は、搭載部に配された熱電対を含んでもよい。また、上記搬送装置において、測温部は、搭載部から離間して配された放射温度計を含んでもよい。
(もっと読む)
基板処理装置、積層半導体装置製造方法及び積層半導体装置
【課題】ロボット搬送アームの位置ずれを補正する。
【解決手段】基板を処理する複数の処理室に連結された連結室と、連結室に配され、基板を複数の処理室の間で搬送する搬送アームと、搬送アームに配され、搬送アームの移動量を計測する移動量計測部と、基板の方向における搬送アームの連結室内での位置を計測する位置計測部と、移動量計測部により計測された移動量に対応する位置と位置計測部により計測された位置との差に基づいて、基板を搬送する場合の搬送アームの位置を補正する補正部とを備える基板処理装置が提供される。
(もっと読む)
吸着方法、吸着装置、基板貼り合せ装置および積層半導体製造方法
【課題】基板を基板ホルダに確実に静電吸着させる。
【解決手段】基板を基板ホルダに静電吸着させる吸着方法であって、基板を基板ホルダに載置する場合に、基板ホルダに初期電圧をかける初期電圧ステップと、初期電圧をかけた状態で、漏れ電流を計測することにより、基板ホルダに基板が吸着されたか否かを検出する吸着検出ステップと、吸着検出ステップにより基板ホルダに基板が吸着されたことが検出された場合に、初期電圧よりも低い吸着電圧を基板ホルダにかける吸着電圧ステップとを備える吸着方法が提供される。
(もっと読む)
複数の基板を位置合わせして重ね合わせる重ね合わせ装置
【課題】ウェハの直径が大きくなる傾向にある近年、重ねあわされる互いのウェハ全面においてサブミクロンの精度で高速に位置合わせを行うことが困難になってきている。特に、一方のウェハに対して他方のウェハを、位置合わせ指令に従って正確にかつ高速に移動させることができる重ね合わせ装置が望まれている。
【解決手段】複数の基板を位置合わせして重ね合わせる重ね合わせ装置は、第1基板を保持する第1ステージと、第1基板に対向して配置される第2基板を保持する第2ステージと、対向方向に直交する方向へ移動可能な第3ステージと、第2ステージを重力方向に支持する支持機構と、第3ステージの移動に非接触で追従して第2ステージ及び支持機構が一体的に移動するように、第3ステージと支持機構の間に設けられた推力伝達部とを備える。
(もっと読む)
搬送アームの洗浄方法、基板処理装置の洗浄方法及び基板処理装置
【課題】搬送アームに付着しているコンタミを除去する基板処理装置の制御方法を提供する。
【解決手段】基板の搬送を行うための静電チャックを有する搬送アームの洗浄方法であって、前記搬送アームに帯電している異物が付着している場合において、前記搬送アームに前記基板が載置されていない状態で、前記静電チャックの電極の各々に帯電している異物の電荷の極性と同じ極性の電圧を印加する電圧印加工程を有し、前記搬送アームに付着している異物を除去することを特徴とする搬送アームの洗浄方法を提供することにより上記課題を解決する。
(もっと読む)
搬送装置
【課題】 真空チャンバに窓を取り付けなくても、また、搬送体の裏面又は表面の状態にも関わらずに、搬送体が搬送装置に受け渡されたか否かを検出することができる搬送装置を提供すること。
【解決手段】 伸縮及び旋回可能に構成された回転・伸縮部と、回転・伸縮部の先端に設けられ、搬送体が載置されるピック14a(14b)と、ピック14a(14b)内に設けられた高電位側内部電極31(+)及び低電位側内部電極31(−)を含む、搬送体をピック14a(14b)に静電吸着させるジョンセン−ラーベック型の静電吸着機構30と、ピック14a(14b)上に搬送体の有無に関わらずに、高電位側内部電極31(+)から低電位側内部電極31(−)に向かって流れる微小電流Iを検出し、微少電流Iの増減に基づいて、ピック14a(14b)上に搬送体が有るか無ないかを判定する判定器34と、を具備する。
(もっと読む)
搬送装置
【課題】 搬送速度を上げても搬送精度の低下を抑制できる搬送装置を提供すること。
【解決手段】 伸縮及び旋回可能に構成された搬送アーム16と、搬送アーム16の先端に設けられ、搬送体Wが載置されるピック17と、ピック17内に設けられた内部電極31を含む、搬送体Wをピック17に静電吸着させる静電吸着機構30と、ピック17内に設けられたガス流路41を含む、搬送体Wの、ピック17との吸着面42にガスを吐出させるガス吐出機構40と、静電吸着機構30及びガス吐出機構40を制御し、静電吸着機構30による静電吸着を解除した後、搬送体W及びピック17に対する除電シーケンスと吸着面42へのガスの吐出とを並行して実行させる制御部50と、を具備する。
(もっと読む)
基板移載装置、基板位置合わせ装置、基板移載方法およびデバイスの製造方法
【課題】基板ホルダに基板を移載する基板移載装置において、相対的な位置ずれ量が大きい場合に実行する基板を基板ホルダから剥離する動作は、例えばリフトピンを用いて基板を持ち上げて行われる。しかし、強制的な剥離動作を行うと、剥離時の衝撃により基板がリフトピン上で大きくずれてしまったり、場合によっては基板がリフトピンから落下することがあった。
【解決手段】基板ホルダに基板を移載する基板移載装置であって、基板ホルダを載置するステージと、ステージに載置された基板ホルダから基板ホルダの上方へ離間させて基板を支持するリフトピンと、ステージに載置された基板ホルダとリフトピンに支持された基板の位置を検出して、基板ホルダと基板との水平面に沿った相対的なずれ量を検出する検出部とを備える。
(もっと読む)
静電チャック
【課題】接着剤層の厚さを均一にすることにより、吸着面の平面度と金属ベースの表面に対する吸着面の平行度とを高めることができる静電チャックを提供すること。
【解決手段】静電チャック1は、セラミック絶縁板10及び金属ベース30を備える。金属ベース30は、接着剤層20を介してセラミック絶縁板10に接合される。静電チャック1は、吸着用電極層51に電圧を印加させた際に生じる静電引力を用いて被吸着物をセラミック絶縁板10の第1主面11に吸着させる。また、接着剤層20内には、セラミック絶縁板10の第2主面12と金属ベース30の第1面31とに接触して接着剤層20の厚さを保持する複数のセラミック球21が配置される。
(もっと読む)
1 - 20 / 66
[ Back to top ]