
Fターム[5F031LA15]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 動作機構等 (3,476) | 動力伝達機構 (1,599) | シリンダ、ピストン (469)
Fターム[5F031LA15]に分類される特許
461 - 469 / 469
薄膜形成装置
【課題】 ドラム型基板ホルダーの外周面に対して基板の取り付け、取り外しを、簡易な構成で容易に行うことができる薄膜形成装置を提供する。
【解決手段】 ドラム型基板ホルダー5を水平方向の回転軸を回転中心にして成膜室内に水平状態で回転自在に支持し、基板12を固定保持した基板固定治具13をアームでドラム型基板ホルダー5の外周面上に水平に搬送することで、ドラム型基板ホルダー5の外周面の角部5aに設けた固定装置14で基板固定治具13の端部13bを固定することができる。
(もっと読む)
マルチポジションストップ機構

【課題】 マルチポジションストップ機構を提供することである。
【解決手段】 互いに接触する間に移動可能な第1および第2の対象物間の複数のストップポジションを提供するためのマルチストップ機構。本発明のマルチストップ機構は、マルチストップ機構を第1の対象物および/または第2の対象物に固定するハウジングと、このハウジングに回転可能にマウントされた回転可能なシャフトと、この回転可能なシャフトに位置づけられた複数のストップとを含む。シャフトがハウジング内で回転するときに、ストップは、ハウジングに対して異なるポジションへ回転される。このように、回転可能なシャフトは、マルチストップ機構が取り付けられていない第1または第2の対象物に接触するようにストップの1つを位置づける。
(もっと読む)
イオンビーム注入装置用のアンビリカルコード設備の連結装置
イオンビーム注入装置は、ビームラインに沿って移動するイオンビームを発生させるためのイオンビーム源と、イオンビームと交差するように加工物が配置されて、イオンビームによって加工物の表面にイオンを注入するための真空室、即ち、注入チャンバーとを含む。さらに、イオンビーム注入装置は、注入チャンバーに連結され、加工物24を支持する加工物支持構造体100を含む。加工物支持構造体は、加工物24を支持するための回転可能な受け台204を含む静電チャック202を有する。さらに、加工物支持構造体は、受け台に連結されて回転可能な第1リール262と、第1リールに連結された冷却ラインおよび電気導体等の設備を担持する屈曲性の中空コードとを含む。その結果、受け台が第1方向に回転すると、第1リールの回りに巻き取られる屈曲可能なコードの長さが増加し、また、受け台が第1方向と反対の方向に回転するとき、第1リールの巻き取られる屈曲可能なコードの長さが減少する。  (もっと読む)
(もっと読む)
ドア作動式ウェーハ制止部を備えるウェーハ容器
ウェーハを保持するための容器は、上面、底面、1対の対向面、背面、ドアフレームにより規定される対向開口前部をもつ筐体を含む。ドアは、開口前部を閉止するため、ドアフレームにおいて封止的に係合可能である。容器はさらに、固定式ウェーハ制止手段および操作可能ウェーハ制止手段を含む筐体内ウェーハ制止手段を含む。操作可能ウェーハ制止手段は、ドアフレームに対してドアを係脱することで選択的に位置決め可能であり、ドアがドアフレームから離脱する場合、容器に対してウェーハの挿入あるいは除去を可能にするよう位置決めされ、ドアがドアフレームと係合する場合、ウェーハを容器内で制止するため、固定式ウェーハ制止手段と協動するよう位置決めされる。 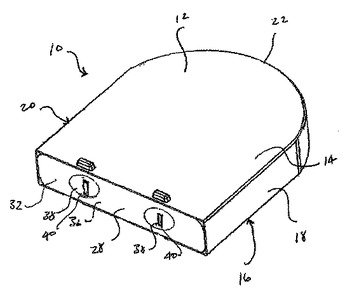 (もっと読む)
(もっと読む)
基板を処理するためのシステムおよび方法
少なくとも1つの基板(5)を真空プロセスにて処理するための少なくとも1つの処理チャンバ(1)を備えた、基板を処理するためのシステムであって、前記処理チャンバ(1)は、閉鎖ボディ(15)にて閉鎖することができる基板アクセス(13)を備え、このシステムは、少なくとも前記閉鎖ボディ(15)を移動させるように構成された運搬デバイス(8)を備え、この運搬デバイス(8)は、前記基板(5)を前記真空プロセスの際に少なくとも部分的にカバーするためのマスク(4)を、少なくとも前記処理チャンバ(1)の外側のある位置と前記処理チャンバ(1)の内側のある位置との間で運搬するように構成される。少なくとも前記基板ホルダ(2)に、基板ホルダ(2)とマスク(4)とを互いに位置決めするための手段が提供された場合は、有利である。本発明は、更に、このようなシステムの使用に係る。 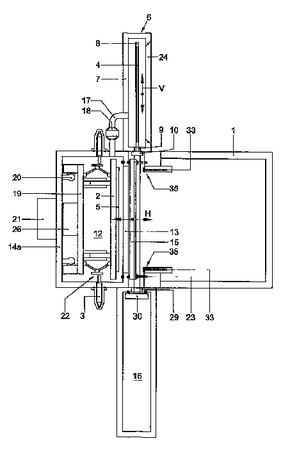 (もっと読む)
(もっと読む)
試料検査および処理用の高精度動的位置合わせ機構

試料位置合わせ機構(10)が、複数の軸に沿って動かせる可動ステージ(12)と、試料取り付けチャック(14)と結合され、それを支持する板(35)と、板を可動ステージに結合し、可動ステージと板との間の異なる位置に相隔たり、かつ可動ステージと板との間の距離を変化させるために別々に制御できる、複数の直線変位機構(36,38)と、可動ステージおよび板に結合する可撓性部材(22)と、を含む。可撓性部材は3つの運動軸で応従して動く。直線変位機構の直線変位に対応する可撓性部材は、試料取り付けチャックの直線および回転運動を3つの応従運動軸で可能にする。 (もっと読む)
半導体ウェーハを取り扱うエンドエフェクタ
半導体ウェーハを取り扱ういろいろなエンドエフェクタの設計が開示されている。例えば、比較的低温でウェーハを取り扱うエンドエフェクタが、比較的高温でウェーハを取り扱うエンドエフェクタとともに開示されている。いずれのエンドエフェクタも、ウェーハの縁部で該ウェーハに単に接触するように構成されている、独自に設計された支持部材を含んでいる。エンドエフェクタは、また、ウェーじゃ検出システムを含み得る。比較的低温でウェーハを取り扱うエンドエフェクタは、また、ウェーハを位置決めするばかりでなく、エンドエフェクタに取り付けられているロボット・アームにより引き起こされるエンドエフェクタの加速または減速中、エンドエフェクタ上のウェーハを保持するのに使用される押し装置を含み得る。設計されているように、エンドエフェクタは、非常に薄い外形を有し、簡単に操縦しやすいエンドエフェクタを作り得る。
 (もっと読む)
(もっと読む)
アライメントの製造方法
【課題】ガラス基板とメタルマスクとを貼り合せることにより貼り合わせ精度の向上を図ること。
【解決手段】ガラス基板を介してメタルマスクを所定の隙間を有して重ねる第1のステップS101と、カメラにより第1及び第2のマークの撮像情報に基づいて第1と第2のマークとの位置の差を求め、差が所定の範囲内か否かを判断する第2のステップS103と、前記差が範囲外の場合、前記位置の差に基づいてガラス基板をX,Y軸方向に移動させる第3のステップS105と、前記差が範囲内の場合、メタルマスクとガラス基板とを貼り合せる第4のステップS107と、第2のステップS103を実行する第5のステップS109と、第5のステップS109での前記差が範囲外の場合、メタルマスクとガラス基板とを分離する第6のステップS111とを備えたものである。
(もっと読む)
静電チャック
【課題】 簡単な電極パターンによってウエハ吸着領域のほぼ全域に安定で均一な吸着力を得ること。
【解決手段】 静電チャック100の電極パターン3は、半径方向に直線部31a、31bを有し、この直線部31a、31bから枝状に複数のC字形状部32a、32bを延出した形状で、その直線部31a、31bは、互いに対向して直径方向となる略一直線上に位置し、前記C字形状部32a、32bは複数の同心円パターンを形成され、相互にくし歯状に入り込むようになる。
(もっと読む)
461 - 469 / 469
[ Back to top ]