
Fターム[5H004HB02]の内容
フィードバック制御一般 (10,654) | 検出量の種類 (1,307) | 流量 (101)
Fターム[5H004HB02]に分類される特許
81 - 100 / 101
プロセス制御環境においてモデル品質を解析する装置および方法
方法は、モデルと関連した信号および外乱を特定することを含む。信号および外乱は、1または複数のプロセス変量と関連した履歴データを用いて特定される。この方法はまた、複数の分解能レベルで、信号および外乱を分解することも含む。この方法は更に、分解した信号および分解した外乱を用いて、信号(502、504、506)から複数のデータ・セグメントを抽出することも含む。加えて、この方法は、抽出したデータ・セグメントおよび履歴データの少なくとも一部分を用いてモデル(120)の特性を決定することを含む。  (もっと読む)
(もっと読む)
プロセス制御環境において有益なデータを特定する装置および方法
予測制御のモデルを検証する方法は、1または複数のプロセス変量と関連した履歴データ(122)を用いて信号(802)および外乱(804)を特定することを含む。この方法はまた、信号(802)および外乱(804)のウェーブレット分解(704)も含む。この方法は更に、分解した信号(802)および分解した外乱(804)を用いて、分解した信号(802)と関連した過渡や特異点(706)、(1002a〜1002b)などのような複数の点を特定することも含む。加えて、この方法は、点(1002a〜1002b)のうちの少なくとも幾つかを選択すること、および信号(802)から複数のデータ・セグメントを抽出することも含み、このデータ・セグメントは、選択された点(1002a〜1002b)と関連する。  (もっと読む)
(もっと読む)
多入力多出力系の制御装置

【課題】多入力多出力系のモデルを高い精度で構築するとともに、計算負荷を抑えることで、内燃機関などのプラントを最適に制御すること。
【解決手段】 実機を非線形モデルで近似した精密モデル10を作成する精密モデル作成手段と、精密モデル10へ入力される複数の入力値U1(t),U2(t),・・・,Uj(t)の制約条件を設定する入力制約条件設定手段と、実機を線形モデルで近似した簡易線形モデル11を作成する線形モデル作成手段と、簡易線形モデル11を用いて、目標出力に対する最適入力を算出する最適入力算出手段と、最適入力に基づいて、制約条件を絞り込む制約条件限定手段と、絞り込まれた制約条件に基づいて、実現し得る複数の入力値U1(t),U2(t),・・・,Uj(t)の全ての組み合わせを精密モデル10へ入力する入力手段と、入力値U1(t),U2(t),・・・,Uj(t)に対応して精密モデル10から出力された複数の出力値Y1(t),Y2(t),・・・,Yk(t)を評価する評価手段と、を備える。
(もっと読む)
トンネル換気制御方法および装置

【課題】トンネル換気制御において、煤煙濃度やCO濃度の予測値が、測定不能な自然
風や車の汚染物質排出量の影響で不正確になり、適切な運転が難しい。
【解決手段】直近の予測結果と対応した実績値のみに着目して予測誤差の時系列を生成し、
これに従って予測演算部の予測結果を補正する。また予測誤差時系列の自己相関を算出し、この自己相関を評価し予測誤差算出部の出力に乗じるゲインを決定する。
(もっと読む)
水運用計画立案装置及びそのシステム
【課題】上水道の導送水管網において、運用計画を立案するに際して、再度立案のときの判定条件として計画値と実績値の差が指定値を越える場合の条件に他の判定条件を加えることにより、対応する実績値により近い計画値を算出する。
【解決手段】水運用計画立案装置133は、実需要量に基づいて予測需要量を算出する需要予測部と、予測需要量に従い、各管路の流量と施設の水量を最適化する計算を行って計画値を計算する計画立案部と、計画値と対応する実績値との差が所定の許容差内か否か、および予測需要量と対応する実需要量との差が所定の許容差内か否かを判定し、いずれかの差が許容差以上であるとき、再立案のために需要予測部と計画立案部を実行するよう制御する再立案判定部とを備える。
(もっと読む)
プラント制御システム用オンディマンドの自動チューナ
自動的に制御システムをチューニングするための方法であって、その方法は、入力励起に応答して、少なくとも1つのプラントサブシステムに関して目標ループの伝達関数を選択するステップと、プラントサブシステムの伝達関数に関して少なくとも1つのフィットエラー基準を選択するステップと、自動的に、入力励起を入力し、プラントサブシステムの伝達関数を目標ループの伝達関数にチューニングするステップと、を含む。チューニングするステップは、プラントサブシステムの制約に従って決定される複数の帯域幅から、プラントサブシステムの伝達関数の帯域幅を自動的に選択するステップと、入力励起をプラントサブシステムに入力するステップと、入力励起に応答して、目標ループの伝達関数に対してプラントサブシステムの伝達関数のフィットエラーを決定するステップと、フィットエラー基準に従って帯域幅の選択を続行するステップと、を含む。  (もっと読む)
(もっと読む)
制御装置
【課題】 位相遅れやむだ時間などが比較的大きい制御対象を制御する場合において、制御対象の入出力間での制御タイミングのずれの解消、および制御精度の向上をいずれも達成することができる制御装置を提供する。
【解決手段】 制御装置1のECU2は、状態予測器22およびDSMコントローラ24を備える。状態予測器22は、予測アルゴリズムに基づき、出力偏差VO2の予測値PREVO2を所定の算出周期ΔTkで算出し、DSMコントローラ24は、ΣΔ変調アルゴリズムに基づき、算出された予測値PREVO2に応じて、目標空燃比KCMDを、予測値PREVO2の算出周期ΔTkよりも短い算出周期ΔTmで算出する。
(もっと読む)
モデル生成方法、状態予測方法、状態調整方法、モデル生成装置、状態予測装置、及び状態調整システム
【課題】 高炉を用いた銑鉄の生産等の断続的に原料を投入して生産物を取り出す生産プロセスについて、生産プロセスの状態を予測するためのモデル式を簡便に生成することができるモデル生成方法、状態予測方法、状態調整方法、モデル生成装置、状態予測装置、及び状態調整システムを提供する。
【解決手段】 状態予測装置1は、生産プロセスでの各種の生産条件を示す条件データ及び生産プロセスの状態を示す状態データを蓄積しておき、ある時点で得られた状態データとその時点以前の所定期間内で得られた複数種類の条件データとの対応関係を解析して、条件データから状態データを予測するモデル式を生成する。状態予測装置1は、生成したモデル式を用いて未来の状態データを予測できる。生産条件が変動した場合でも、モデル式に基づいて他の生産条件を適宜制御することにより、生産プロセスの状態を良好に調整することができる。
(もっと読む)
MPCモデルによるオンライン・ダイナミックアドバイザ
プロセスの同定試験を使用して開発された、モデル予測制御要素からPID制御要素のダイナミクスを除去するための方法が開示されている。そして、これにより、リアルタイムのデータにアクセスして、代替的な制御可能性のシナリオを調べる能力とともにプロセスの将来の状態の予測を継続するようにプロセスとともに作動する、オンラインのオペレータ・アドバイザに基づく非常に迅速な最終制御要素の生成が可能となる。 (もっと読む)
ボイラ自動制御装置および制御方法
【課題】
1台の通風機が運転中の状態から2台目の通風機を起動する際にインバータ駆動側の通風機の風量が不安定化する可能性が高くなるという問題がある。本発明は、この点を考慮して安定かつ安全に通風機を起動するための制御方法を確立することを目的とする。
【解決手段】
インバータにより駆動される通風機の運転中に商用周波数電源により駆動される通風機を起動する場合に、商用周波数電源により駆動される通風機の流量調節操作端への開度指令の増加に伴ってインバータにより駆動される通風機の流量調節操作端への開度指令を減少させる手段と、商用周波数電源により駆動される通風機の流量調節操作端への開度指令がそれぞれの通風機による運転時の開度に到達した後にインバータにより駆動される通風機の回転数をそれぞれの通風機による運転時の回転数に変更する手段とを具備することを特徴とする。
(もっと読む)
制御装置
【課題】 制御対象モデルを用いる場合において、制御対象の動特性が一時的に急変した際でも、制御系の安定性を確保することができる制御装置を提供すること。
【解決手段】制御装置1のECU2は、推定アルゴリズムにより算出した燃料圧の推定値Pf_hatと燃料圧Pfとの偏差である第1推定誤差e_dovに、ローパスフィルタ処理およびレートリミット処理を施すことにより、第1外乱推定値c1を算出し、第1推定誤差e_dovと第1外乱推定値c1との偏差である第2推定誤差e_dov_Hに基づき、所定の外乱推定アルゴリズムにより、第2外乱推定値c2を算出し、燃料圧Pf,第1および第2外乱推定値c1,c2に基づき、所定の制御アルゴリズムにより、燃料圧制御入力Upfを算出する。
(もっと読む)
調節弁制御モジュール
【課題】 従来、プラントのプロセス量を所定の値に制御するために用いられる調節弁の開度制御は、パルス/空気圧変換器や電流/空気圧変換器を介して行われているが、プラント設備の増、改設工事が行われる際に、前記変換器は国内外メーカの各種仕様のものが採用され、それに伴う調節弁制御モジュールも各種毎の専用のモジュールを設けている。このような標準化を阻害し、コスト高、管理保守の複雑化という課題を解決することを目的に、1台の制御モジュールで制御可能とする。
【解決手段】 調節弁制御モジュールに設けられたパルス演算処理回路が開度指令値と実開度との偏差をパルス演算してパルス/空気圧変換器を介し第1の弁の開度制御を、トラッキング処理回路が開度指令値をトラッキング処理して、電流/空気圧変換器を介し第2の弁の開度制御を行う。
(もっと読む)
連続系プロセス制御方法および連続系プロセス制御システム
【課題】従来プラント内に設置していた原料タンクや中間タンクを用いなくとも、生成物の均一化を容易に図ることのできる連続系プロセス制御方法および連続系プロセス制御システムを提供する。
【解決手段】連続系プロセス制御方法では、プラント内に配置されたセンサから得たプロセスデータをもとに、ある単位で離散化した連続系プロセスの生成物についてプロセス内の移動と共にプロセス情報を収集し、このプロセス情報に基づいて前記ある単位で離散化された生成物の性状を推定し、この推定値があらかじめ指定した目標値に近付くように前記プラント内に配置された制御装置を制御する。
(もっと読む)
工程パラメータの平均値の所望値への段階的制御
多段階制御機(610)は、工程を行うシステム(620)の稼動を指示する。前記工程は、複数の工程パラメータ(MPP)(625)を有するが、MPP(625)の1つ以上が制御可能な工程パラメータ(CTPP)(615)であり、MPP(625)の1つが目標設定工程パラメータ(TPP)(625)である。前記工程は、長さTPLAAV2の定義された時間におけるTPP(625)の実際平均値(AAV)に対する第1の限界を示す定義された目標値(DTV)を有する。前記AAVは、定義された期間におけるTPPの実際数値(AV)に基づいて計算される。第1論理制御器(630)は、少なくとも長さがTPLAAV2であり、現在時点T0から未来時点TAAV2まで延長される第1未来時間(FFTP)においてTPPの未来平均値(FAV)を予測し、このとき、前記TAAV2以前にTPP(625)が定常状態に移動する。FAVは、(i)長さがTPLAAV2以上であり、過去時点T−AAV2から現在時点T0まで延長される第1過去時間(FPTP)における様々な時点でのTPP(625)のAAV、(ii)MPP(625)の現在値、及び(iii)DTVを基にして予測される。第2論理制御器は、TPLAAV2の長さより短くTPLAAV1と等しい長さを有し、現在時点T0から未来時点TAAV1まで延長される第2未来時間(SFTP)の間にTTP(625)のAAVに対する第2の限界を示す追加的目標値(FTV)を確立する。FTVは、FFTPにおいて予測されたTPP(625)のFAVのうちの1つ以上に基づいて確立される。また、第2論理制御器は、(i)TPLAAV1の長さを有し、過去時点T−AAV1から現在時点T0まで延長される第2過去時間(SPTP)における様々な時点でのTPP(625)のAAV、(ii)MMP(625)の現在値、及び(iii)FTVに基づき、CTPP(615)各々に対する目標設定点を決める。第2論理制御機は、前記CTPP(615)に対して決められた目標設定点に従ってCTPP(615)各々の制御を指示する論理をさらに有する。 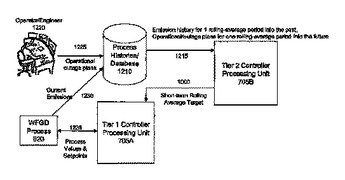 (もっと読む)
(もっと読む)
再発性ローカル学習機械を使用するシステム状態モニタリング方法及びその装置
所定のシステムの基準データ観察を使用して、そのような観察の基準集合(102)を展開する。次に、後続の観察(一実施形態で、現在の観察を含む)(107)を使用して、この基準集合の一部の選択を容易にして、モデルとして働く、観察の結果集合(118)を作る。次に、このモデルを、実際のシステムパフォーマンスと比較して使用して、たとえば、障害状態に向かう傾向を検出することができる。好ましい手法によれば、このモデルは、時々再計算され、特定の実施形態によれば、現在の観察の新しい集合ごとに再計算される。 (もっと読む)
電気的製造制御に対する確率制約最適化
本発明の方法は、デバイスを製造するためのプロセスのモデルを定義することを含み、プロセスは複数のステップを含んでいる。複数のインラインプロセスターゲットが、プロセスステップの少なくとも一つのサブセットに対して定義される。モデルはインラインプロセスターゲットを複数のプロセス出力パラメータに関係づける。インラインプロセスターゲットに対する、確率制約の第1セットが定義される。プロセス出力パラメータに対する、確率制約の第2セットが定義される。目的関数が、モデルと複数のプロセス出力パラメータに基づき定義される。プロセス出力パラメータのトラジェクトリが、各プロセスステップにおけるインラインプロセスターゲットに対する値を決定するために、各プロセスステップに対して、確率制約の第1及び第2セットを条件として目的関数を最適化することにより決定される。各プロセスステップの終了後に、残りのプロセスステップに対して最適化を繰り返す。  (もっと読む)
(もっと読む)
内燃機関の制御装置
【課題】 ISCのフィードバック制御の応答性と目標回転速度への収束性(安定性)とを両方とも向上させる。
【解決手段】 ISC実行中に実エンジン回転速度の変化方向が目標回転速度に対して近付く方向か遠ざかる方向かを判定し(ステップ102)、遠ざかる方向である場合は、積分項のゲインを大きめの値に設定した第1のゲイン設定テーブルを選択し、この第1のゲイン設定テーブルを参照してその時点の実際の回転速度偏差ΔNE2に対応した積分項のゲインを算出する(ステップ103)。一方、実エンジン回転速度が目標回転速度に近付く方向に変化している場合は、前記第1のゲイン設定テーブルよりも積分項のゲインを小さい値に設定した第2のゲイン設定テーブルを選択し、この第2のゲイン設定テーブルを参照してその時点の実際の回転速度偏差ΔNE2に対応した積分項のゲインを算出する(ステップ104)。
(もっと読む)
プラント運用最適化装置
【課題】 遺伝的アルゴリズムを迅速に行うことにより短時間で運用計画を作成することができるプラント運用最適化装置を提供すること。
【解決手段】 プラント運用最適化装置10は、上流側から下流側に向かって接続された複数のプラント施設を有し少なくとも一対のプラント施設は並列に配置されたプラントに対して、予め作成してある運用計画に基づいて制御を行うものである。運用計画手段14は、定式化機能24を含む遺伝的アルゴリズムを用いて各プラント施設に関する最適な運用計画を作成する。運用計画手段14は、一のプラント施設から下流側に並列に配置された一対のプラント施設へ配水が行われる際に、遺伝的アルゴリズムの定式化機能24を、多分配プロセス定式化手段18から送られる一のプラント施設から下流側の一対のプラント施設への配水量比率に関する情報に基づいて実行する。
(もっと読む)
信号をフィルタリングするための装置及び方法
信号をフィルタリングするための方法及び装置が提供される。この方法及び装置は、フィルタリングされる信号のサンプルを受け取り、そのサンプルと関連するバイアスを特定する。この方法及び装置は、また、外乱の影響を低減するために、バイアスの一部分と組み合わせて、フィルタリングされる信号の以前のサンプルに対しての期待値を出力する。  (もっと読む)
(もっと読む)
クッション・フィルタを用いてバルブを動作させる装置及び方法
クッション・フィルタを使用してバルブを動作させるための方法、システム、及びコンピュータ・プログラムが提供される。この方法、システム、及びコンピュータ・プログラムでは、バルブの動作に関連するプロセス変数信号を受け取る。この方法、システム、及びコンピュータ・プログラムでは、クッション・フィルタを使用してプロセス変数信号をフィルタリングして、フィルタ済みプロセス変数信号を生成する。クッション・フィルタは、それ自体が使用するバイアスにおけるクッションを実施する。この方法、システム、及びコンピュータ・プログラムでは、フィルタ済みプロセス変数信号に少なくとも部分的に基づいて、バルブを調節するための出力信号を発生させる。  (もっと読む)
(もっと読む)
81 - 100 / 101
[ Back to top ]