
Fターム[5H004HB02]の内容
フィードバック制御一般 (10,654) | 検出量の種類 (1,307) | 流量 (101)
Fターム[5H004HB02]に分類される特許
61 - 80 / 101
自動適合装置及び方法
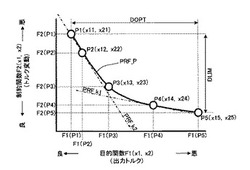
【課題】効率的且つ効果的に適合値を決定する。
【解決手段】自動適合システム100において、次善最適解決定処理が実行される。当該処理においては、パラメータx1及びx2に応じて変化する目的関数F1及び制約関数F2相互間のパレート解が、適合範囲内のパラメータ値について導出され、目的関数F1及び制約関数F2により規定される座標平面上で、パレート解に対応する座標点を繋げて得られるパレート解曲線PRF_Pが設定される。一方、当該適合範囲でパラメータを変化させた場合の、目的関数F1及び制約関数F2各々における最大値と最小値との偏差DOPT及びDLIMに基づいて規定される傾きkに、更にエンジン200の定常比率Aに応じて定まる補正係数αを乗じてなる傾きk’の直線が設定される。この直線とパレート解曲線との接点に対応するパレート解が、次善的な最適解として抽出される。
(もっと読む)
マルチホップ無線システムの電力制御方法およびその電力制御システム

【課題】 マルチホップ無線システムの子局の無駄な動作を省き、バッテリ消費を抑える、電力制御方法を提供する。
【解決手段】プラント計装プロセスとプラント計装監視制御装置とが、マルチホップ無線システムを介して接続されるプラント計装監視システムに用いられ、プラント計装プロセスにより検出されるプラントパラメータの測定信号を収集し、当該収集した測定信号に基づきプラント計装プロセスの動特性を予測する第1のステップ(S301〜S304)と、第1のステップにおける数値演算結果に基づきプラント計装プロセスの動特性が安定状態にあるか否かを判定する第2のステップ(S305)と、第2のステップで求めた安定状態の期間に適応してマルチホップ無線システムの子局の起動タイミングを制御する第3のステップ(S306)と、を有して、電力制御を行う。
(もっと読む)
プラント制御装置
【課題】 操作信号を変更する効果およびこの効果が得られる物理的理由を短時間で分析し、これらの分析結果を画面表示可能なプラント制御装置を提供する。
【解決手段】 計測信号DB210と、操作信号DB250と、数値解析実行手段220と、数値解析結果DB240と、操作信号に対する計測信号の値を推定するモデル230と、モデル230を用いる学習手段260と、学習情報DB270と、操作信号生成手段280で用いる情報の制御ロジックDB290と、プラント運転特性の知識DB400と、知識DB400と学習情報DB270と操作信号DB250と計測信号DB210の情報により数値解析結果DB240の情報を処理する分析手段300とを備え、分析手段300は、操作方法の妥当性の学習根拠分析手段310と、操作信号がプラントに与える効果と異常な計測信号の有無を評価する信号分析手段320と、知識DB400の情報を修正する知識DB更新手段330との少なくとも1つを含む。
(もっと読む)
質量流量コントローラのコントローラ利得スケジューリング
フィードバック制御利得を有する質量流量コントローラは、コントローラを通過する流体の流れを検知するように構成されているセンサと、コントローラを通過する流体の流れを調節するように配置されている弁と、センサが検知する流体の流れの関数として、弁を制御するように構成されているプロセッサとを備えている。センサおよび弁は、フィードバック系内に配置され、プロセッサは、少なくとも1つの較正気体パラメータの少なくとも1つの動作気体パラメータに対する比に基づいて、フィードバック・コントローラ利得をリアル・タイムで更新し、較正状態とは異なる動作状態において一定の制御挙動を有するように、フィードバック系の閉ループ伝達関数が、動作状態には関係なく、実質的に一定となるようにする。 (もっと読む)
遅延を伴った制御対象を同定するための方法および装置、制御装置およびコンピュータプログラム製品
本発明は、蒸気発生器の制御時に遅延を伴う制御対象を同定するための方法およびこの方法を実施するように形成された装置に関する。未知の時間変動的なN次遅延素子と既知の積分器とから成る蒸気発生器のモデル構造が設けられる。さらに、燃料質量流量の測定値、タービン蒸気質量流量の測定値、タービン蒸気質量流量の取り出し後に蒸気発生器の背後の蒸気アキュムレータ内に生じる主蒸気圧力の測定値が同定に使用される。オンラインで記録されたこれらの測定値とモデル構造とによって蒸気発生器出口の主蒸気質量流量が逆算される。こうしてN次遅延素子の入力量とその出力量が特定され、N次遅延素子の連続伝達関数のパラメータが推定法によってやはりオンラインで確定される。推定されたパラメータは次にN個の独立した時定数を有する遅延素子の時定数に換算される。次のステップではN個の独立した時定数の比較によって、所定のモデル構造の遅延素子について有意な時定数が確定される。 (もっと読む)
流体の温度制御装置及び方法
【課題】流体の温度制御装置において、制御の自由度を損なわずに、温度センサの個数を抑制する。
【解決手段】 推定器6が、出口温度センサが備えられていない加温槽15aの出口における流体の出口温度を推定する。制御部5は、出口温度センサ16が設けられている加温槽15bに対しては、測定された出口温度と目標温度とに基づいて操作量を決定し、出口温度センサが設けられていない加温槽15aに対しては、推定器6で推定された推定温度と目標温度とに基づいて操作量を決定する。
(もっと読む)
プロセスの制御方法
【課題】極めて応答性の遅いプロセスであっても、制御量の変化を定期的にデータサンプリングして、非常に簡単な仕組みでその時点の操作量を決め、自動的に正確に運転できるように制御するプロセスの制御方法を提供する。
【解決手段】定期的に制御量のデータサンプリングを行い、前回の制御量と今回の制御量の差分を相殺する操作量と、今回から次回サンプリングまでの期間に目標値に対する制御偏差を一定割合で減ずる操作量との和を、今回の操作量修正分として、前回の操作量に加算して、今回の操作量とする操作方法を用いた制御量の変化が遅いプロセスの制御方法であって、比例ゲインKc及び積分時間Tiを、Kc=(0.04〜1)×Tp/Tsと、Ti=Tc/(1−α)とによって求める。
(もっと読む)
プロセスの制御装置および制御方法
【課題】複数の制御因子を有するプロセスの、プロセス条件を一定範囲に制御するための制御因子のうち、逆方向の効果をもたらす少なくとも2つの制御因子の制御が切り替わる境界におけるハンチングによる不必要なロスを低減でき、かつ、不感帯による制御の不安定を回避できるという優れたプロセスの制御装置および制御方法を提供する。
【解決手段】(1)プロセス条件を一定範囲に制御するための制御因子のうち、逆方向の効果をもたらす少なくとも2つの制御因子に対して独立して制御する手段を含むことを特徴とするプロセス制御装置。(2)プロセス条件を一定範囲に制御するための制御因子のうち、逆方向の効果をもたらす少なくとも2つの制御因子に対して独立して制御する手段を設置して、一定の制御範囲内で少なくとも2個以上の設定値を設定し、制御することを特徴とするプロセス制御方法。
(もっと読む)
多重モード制御アルゴリズム
多重モード制御アルゴリズムを使用して、流体の流量を制御するためのシステムおよび方法を説明する。一実施形態は、閉ループモードから開ループモードに多重モード制御アルゴリズムを変化させるための方法を含む。本方法は、センサによって生成される少なくとも1つのセンサ指標を受信するステップを含む。多重モード制御アルゴリズムは、少なくとも1つのセンサ指標に基づいて、閾値条件が充足される場合に、閉ループモードから開ループモードに修正される。多重モード制御アルゴリズムは、設定値に従って流体の流量を制御するために、流量制御器によって使用される。 (もっと読む)
気体バネ式除振装置及び該装置の制御方法
【課題】流量制御型弁を用いて排気流量を抑制するという長所を維持しつつ、従来よりも応答性の高い高精度な制御が可能な気体バネ式除振装置及びその制御方法を提供する。
【解決手段】スプール弁及び圧力微分計を備えた除振装置において、スプール弁の不感帯での動特性を向上させるために、圧力微分値のフィードバック値が、入力電圧と出力流量との関係がゼロ点を通る線形性を備えた規範モデルGrefに追従するような制御を行い、スプール弁の非線形性を補償する。
(もっと読む)
応答時間による適応閉ループ制御アルゴリズム
適応閉ループ制御アルゴリズムを使用して流体の流れを制御するための、システムおよび方法が記述される。一実施形態は、設定値指標および/またはセンサによって生成されるセンサ指標を受け取るための方法を含む。閉ループ制御アルゴリズムの応答時間は、少なくとも1つの閾値が、センサ指標および/または設定値指標に基づいて満たされるときに、修正される。流量制御器によって実装される閉ループ制御アルゴリズムは、閉ループ制御アルゴリズムと関連する少なくとも1つのパラメータを調整することによって、閉ループ制御アルゴリズムの応答時間を修正することに応答して安定化する。  (もっと読む)
(もっと読む)
プラントの制御装置
【課題】制御操作時に状態が改善しない、又は、悪化するリスクを低減し、制御性能を向上させ常に安定した操作が可能なプラント制御装置を提供することを目的とする。
【解決手段】プラントの計測データを入力し前記プラントへの操作指令値を演算する基本制御指令演算手段と、前記計測データ及び前記操作指令値を有する運転データを蓄積する運転実績データベースと、現在の前記運転データと過去の前記運転データに基づいて類似状態を検索・抽出する状態検索手段と、該状態検索手段で抽出された類似状態である過去の運転データにおいて、制御操作による運転状態の変化実績から頻度分布または確率分布を算出し、前記制御操作による改善確率または非改善確率を算出する改善確率演算手段と、該改善確率演算手段で算出した改善確率または非改善確率に基づいて、次の操作指令値を決定する操作指令決定手段を具備することを特徴とするプラントの制御装置である。
(もっと読む)
対象の数に合わせた最適制御システム、無線端末、制御機器
【課題】 室内の人数も加味して空調の制御を行う等、複数の対象の数に合わせた管理対象の最適な制御を行い得る最適制御システムを提供する。
【解決手段】 エリア1乃至nのそれぞれに配設した管理対象11乃至1nと、複数の検出対象のそれぞれに一対一に対応させて帰属させるとともにそれぞれが所定の端末信号を無線で送出する無線端末31乃至35と、エリア1乃至nのそれぞれに配設するとともに、端末信号を受信して受信した無線端末31乃至35の数を表す情報を少なくとも含む受信信号を送出する受信端末21乃至2nと、各受信信号を受信して処理し、各エリア1乃至n毎の無線端末31乃至35の数に基づく要素を少なくとも加味して各管理対象11乃至1nの所定の制御を行う管理サーバ51とを有する。
(もっと読む)
吸収冷温水併給装置
【課題】冷却運転定格加熱量・加温運転定格加熱量間の加熱量差が大きい運転移行と、冷却主体運転・加温主体運転間の運転移行とを簡便な構成によって安定に移行させ得るようにした吸収冷温水装置を提供する。
【解決手段】吸収冷温水併給装置は温水器と高温再生器との間に設けた加温冷媒制御弁V12の弁開度γにもとづいて高温再生器の加熱量μを冷却定格加熱量μ1から加温定格加熱量μ2、または、その逆に運転移行する。冷却定格加熱量μ1・加温定格加熱量μ2間の段差を複数の段階μ1・μ2・μ3に分け、中心点φ21・φ22をずらせた複数の四角形ヒステリシスループ状の移行制御によって移行させることにより、ハンチング動作による加熱量の頻繁な変動を防止する。また、冷却主体運転・加温主体運転間の運転移行も同様に四角形ヒステリシスループ状の移行制御によって移行させることにより、ハンチング動作による加熱量の頻繁な変動を防止する。
(もっと読む)
プラントの制御装置及びプラントの制御方法
【課題】本発明はプラントの制御を行う複数の操作端の動作速度にばらつきがある場合でもプラントを良好に制御できるプラントの制御装置を提供することにある。
【解決手段】本発明のプラント制御装置は、プラントの制御特性を模擬するモデルと、プラントに対する操作信号を演算する操作信号生成部と、制御パラメータを含む制御ロジックデータを保存する制御ロジックデータベースと、プラントを操作する操作端の操作端仕様データを保存する操作端仕様データベースと、過去の操作信号を保存する操作信号データベースと、過去の計測信号を保存する計測信号データベースと、学習パラメータの初期値の決定と学習パラメータを更新する機能を持つ学習条件決定部と、学習パラメータの制限値を拘束条件としてモデルを用いてプラントの操作方法を学習する学習部と、学習した学習情報データを保存する学習情報データベースを備えるように構成した。
(もっと読む)
プラントの制御装置と制御方法及び火力発電プラントとその制御方法
【課題】制御対象の特性を模擬するモデルを用いて、モデル出力目標値を達成するモデル入力の生成方法を学習し、学習結果に従って操作信号を生成する制御装置において、制御対象の計測信号が運転目標値を達成するためのモデル出力目標値を決定する制御装置を提供する。
【解決手段】制御対象に操作信号を与えた時に得られる計測信号の値を予測するモデルと、モデル出力が目標値を達成するようにモデル入力の生成方法を学習する機能と、学習の結果に従って制御対象に与える操作信号を決定する機能と、予め設定された計測信号の制限値を保存するデータベースと、制御対象の計測信号を取り込む外部入力インターフェイスと、取り込んだ計測信号の値を保存する計測信号データベースと、計測信号データベースに保存された計測信号の平均値,最大値,最小値の少なくとも1つを計算した結果と計測信号の制限値を用いてモデル出力目標値の初期値を決定する機能を備える。
(もっと読む)
流量予測装置、流量予測方法および流量予測プログラム
【課題】雨量または流量に関するデータの偏りに対応しつつ、予測精度を向上させるとともに、学習時間を低減させる。
【解決手段】データ加工機能104は、保存機能103から読み出した予報雨量データ、実績雨量データまたは実績流量データなどを予測モデル構築用の学習データに加工し、平均雨量、流量または流量変化分が一定値以下のデータを予測モデル構築用データから削除し、平均雨量、流量または流量変化分が一定値以上のデータを複数倍し、予測モデル構築手段105は、この予測モデル構築用データに基づいて予測モデルを構築し、予測機能106は、予測モデル構築手段105にて構築された予測モデルおよびデータ加工機能104にて生成された予測モデル構築用データに基づいて、将来の所定時間における河川などの流量を予測する。
(もっと読む)
電空制御ループに対する初期条件が調整可能なリード・ラグ入力フィルタ装置
【課題】 弁体を制御弁の弁座か離隔させ、深刻な遅れがない状態で設定点へ移動させるためのシステムおよび方法を提供する。
【解決手段】制御ループの入力部と通信状態にあるリード・ラグフィルタの入力部への入力パラメータをユーザが選択する調節可能なものとすることにより、小さな振幅の入力が加えられた場合に、制御弁によるチューニング可能な応答を達成することが容易なものとなる。
(もっと読む)
ボイラドラムの水位制御装置
【課題】ボイラドラム水位制御の性能を改善する。
【解決手段】水位制御器43はボイラドラム水位設定値と水位計4からの水位検出値との偏差を演算増幅し、その出力に蒸気流量計5からの蒸気流量値を加え、給水流量計2からの給水流量値を引いて給水調節弁3の開度指令値である操作量を出力する。フィードフォワード補償回路44〜48は、蒸気流量計5からの蒸気流量が入力する、蒸気流量からボイラドラムの水位変動までの動特性を打ち消す伝達関数が設定された補償関数回路44を有し、この補償関数回路44に蒸気流量から水位変動までの動特性を打ち消す伝達関数が設定されているので、水位変動が抑制される。そしてデッドバンド回路45により蒸気流量の変化率が大きく水位の変動が大きい場合に限りフィードフォワード補償回路が作動することになるので、蒸気流量が安定している場合の給水調節弁3の操作量の動作頻度を抑制可能となる。
(もっと読む)
同時プロセスシミュレーションを伴う多目的予測プロセス最適化
プロセスを制御するためのシステムと方法には、プロセスのシミュレーションを行いプロセスの模擬出力を生成することと、プロセスからの被測定入力に基づき、且つプロセスシミュレーターからの模擬出力に基づいて、一式の目標値を開発することと、プロセス制御システムの各作動サイクル中に一式の目標値に基づいてプロセスを制御するように構成された複数の制御出力を生成することとが含まれる。模擬出力には、プロセスの定常状態にいたるまでの一つ又は複数の予測将来値が含まれる。  (もっと読む)
(もっと読む)
61 - 80 / 101
[ Back to top ]