
Fターム[5H004KC45]の内容
フィードバック制御一般 (10,654) | 制御部 (1,337) | 適応制御 (647) | 同定器を有するもの (225) | 同定法 (35)
Fターム[5H004KC45]に分類される特許
1 - 20 / 35
設計装置及び設計プログラム
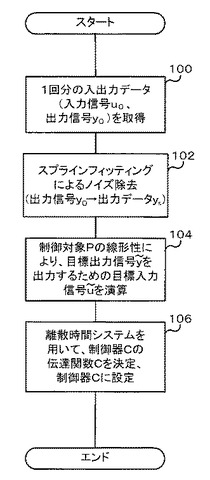
【課題】出力信号に含まれているノイズに係わらず、簡単な計算により最適な制御器を設計する。
【解決手段】入力信号u0を少なくとも1回入力して、制御対象Pから出力された出力信号y0を少なくとも1回計測することにより、少なくとも1回分の入出力データ(入力信号u0及び出力信号y0)を計測する。さらに、出力信号y0に対してスプラインフィッティングを行い、データを平滑化して、出力信号y0から雑音vを除去した出力データysを得る。さらに雑音vを除去した出力データysを線形独立なベクトルの組とし、制御対象Pの線形性に基づいて、目標出力信号y~との線形結合係数列θを算出し、当該線形結合係数列θを用いて、入力信号u0から目標入力信号u~を算出する。算出された1組の目標入力信号u~及び目標出力信号y~と参照モデルMに入力される参照信号r~との偏差e~から制御器Cの伝達関数を決定することにより、制御器Cを設計する。
(もっと読む)
周期外乱抑制装置

【課題】周期外乱オブザーバによるトルクリプル抑制制御では、経年変化によるプラントの変動や、プラント特性の変動等を考慮する必要があるため、同定モデル誤差に対するロバスト性の向上が求められている。
【解決手段】周期外乱の周波数成分が描くベクトル軌跡の位相を演算して位相補正量を演算する位相補正量演算部と、周期外乱の周波数成分が描くベクトル軌跡の進行速度を算出して閾値と比較しながらゲイン補正量を算出するゲイン補正量演算部と、位相補正量とゲイン補正量を乗算してシステム同定モデル補正値を算出し、この補正値に基づいて周期外乱オブザーバ部のシステム同定モデルを補正する回転ベクトル算出部を設けたものである。
(もっと読む)
モデル構成装置
【課題】制御対象のモデルのパラメータを低い演算負荷で、且つ正確に同定すること。
【解決手段】制御対象のモデル式のパラメータを同定し、パラメータの同定によって最適なパラメータ値として求められたパラメータ値をモデル式に適用することによって制御対象のモデルを構成する。そして、制御対象に関する物理法則上の制約を破ることがないモデル式のパラメータの条件を記述した制約条件式を取得し、取得された制約条件式が成立する範囲内でモデル式のパラメータを同定する。
(もっと読む)
分散モデル同定
【課題】分散モデル同定に関して、局所的方法及び大域的方法の双方の利点を組み合わせるとともに、付加的な利益を提供する新たな方法を提供する。
【解決手段】分散モデル同定は、複数のブロックのそれぞれによって受信される値の置換信号値(sig)を生成する信号発生器を用いて複数のブロックの各入力ポートを増強することによりすべての信号リンクを弾性リンクに置き換えることによって達成することができる。その後、受信値と置換信号値との間の差分を計算して、弾性リンクの弾性を制御する補助信号として出力することができる。次に、パラメーターの大域的同定の代わりに、局所データに基づいてブロックパラメーターが局所的に同定される。同時に、補助出力信号はゼロにならざるを得ない。その結果として、発見された解は、大域的同定方法300の解ともなる。
(もっと読む)
オンラインモデル同定を用いたモデル予測制御方法および装置
【課題】操業条件の変更ならびにプロセス特性の変化に対しても制御性能を維持できる、オンラインモデル同定を用いたモデル予測制御方法および装置を提供することを目的とする。
【解決手段】プロセス動的モデルを用いて将来の挙動を予測し最適な制御を行う、オンラインモデル同定を用いたモデル予測制御方法であって、モデル予測制御演算実施にあたっては、用いるプロセス動的モデルを実操業データに基づいてモデル再同定を毎回行う。
(もっと読む)
プロセスモデルの高速同定および生成
【課題】プロセスモデルの高速同定および生成を提供する。
【解決手段】高速プロセスモデル同定技術は、比較的短期間でプロセス出力の初期応答からプロセス入力の変化までの積分ゲイン及びプロセス無駄時間の推定値を構築することで、プロセス入力とプロセス出力との間の動的関係を同定する。積分ゲインおよび無駄時間値が、多くの異なる種類のプロセスのいずれかに対して完全なプロセスモデルを生成するために使用される。これらプロセスモデルは、プロセスシミュレーションを実行するために非常に高速で使用することができるか又は制御目的で使用することができ、プロセスモデルを使用するかそれに依存するプロセス制御システムを従来よりもはるかに高速でオンライン化することができる。さらに、高速モデリング技術を使用したプロセスループを制御する制御装置が、低速プロセスの制御を実行する上で非常に有用である。
(もっと読む)
システム同定方法及びシステム同定装置
【課題】 誤った推定を与えないM系列信号を生成してシステム同定を行うシステム同定方法及びシステム同定装置を提供する。
【解決手段】 第1のサンプリング周期T1、及び、第1のシフトレジスタ数n1で特徴付けられる第1のM系列信号と、第1のサンプリング周期T1と異なる第2のサンプリング周期T2、及び、第2のシフトレジスタ数n2で特徴付けられる第2のM系列信号とを合成して第3のM系列信号を生成し、これを入力信号としてシステム同定を行う。
(もっと読む)
連続的にスケジュールされるモデルパラメータに基づく適応制御装置
【課題】制御装置の調整パラメータを進行するために使用される連続的にスケジュールされるプロセスモデルパラメータを決定する適応プロセス制御装置を提供する。
【解決手段】状態に基づく適応PID制御装置は、プラントの種々の稼動領域における適応調整を実行するために使用される、適切なプロセスモデルを決定するための新しい技術を使用し、特に、当該の種々のプラント稼動領域または点において連続的にスケジュールされるプロセスモデルパラメータの更新を可能にする、プロセスモデルパラメータ決定技術を使用する。この連続的にスケジュールされるプロセスモデルパラメータ更新方法の使用により、プロセスの稼動領域または稼動点における変更に基づいて実行される適応調整手順中に、当該PID制御装置で使用される調整パラメータ間でのより円滑な遷移が実現されるため、全体的な制御が向上する。
(もっと読む)
PID制御装置
【課題】 制御量が周期的な変動を呈している積分プロセスにおいて、制御対象に同定用信号を与えることなく、PID制御器のチューニングを可能とする。
【解決手段】 制御対象12に操作端14から加える操作量と、検出器15で検出される制御量から、周期解析手段31で周期を求める。積分特性算出手段である簡易積分器32で積分ゲインが求められ、プロセスモデル30が生成される。制御モデル20、制御モデルのPIDパラメータを調整する評価器21と併せて制御シミュレータ16を構成し、シミュレーションによって最適なPIDパラメータを算出する。算出した制御モデルのPIDパラメータを、プロセスの要求に合わせて微調整し、制御器13の制御パラメータとして設定することができる。
(もっと読む)
ゲイン調整装置、ゲイン調整方法、ゲイン調整プログラム
【課題】外乱変動の影響を低減し、高精度にループゲインの調整を行うことが可能なゲイン調整装置、ゲイン調整方法、ゲイン調整プログラムを提供することを目的としている。
【解決手段】本発明では、閉ループ回路のループゲイン調整において、ループゲイン調整を複数回実行してループゲインを収束させ、ループゲインの値が収束した後に、外乱変動の影響を考慮して適切に設定された回数のループゲイン調整結果を平均した値を最終的なループゲインの値とする。
(もっと読む)
粘性摩擦同定装置を備えたモータ制御装置
【課題】モータ速度がノイズを多く含む場合にもノイズの粘性摩擦同定精度に与える影響を除去することができ、微小動作のみで粘性摩擦同定をすることができる粘性摩擦同定装置を備えたモータ制御装置を提供する。
【解決手段】入力指令が複数の周波数成分を含む周期信号であって、粘性摩擦同定装置107が、前記入力指令の複数の周波数成分におけるトルク指令と、前記入力指令の複数の周波数成分における前記モータ位置とに基づいて、粘性摩擦同定値を演算するものである。
(もっと読む)
慣性モーメント同定器を備えたモータ制御装置
【課題】 クーロン摩擦の影響を除去し、クーロン摩擦の大きな制御対象の慣性モーメントを高精度に同定することができ、その同定結果に基づいて制御対象を高精度に動作制御できる慣性モーメント同定器を備えたモータ制御装置を提供する。
【解決手段】 モータ位置基本周波数成分を入力し正規化モータ加速度矩形波を出力する正規化モータ加速度矩形波演算器109と、トルク指令基本周波数成分と前記正規化モータ加速度矩形波を入力しトルク指令正規化モータ加速度矩形波乗算値を出力するトルク指令正規化モータ加速度矩形波乗算値演算器110と、前記トルク指令正規化モータ加速度矩形波乗算値を入力しトルク指令正規化モータ加速度矩形波乗算値平均値を出力するトルク指令正規化モータ加速度矩形波乗算値平均値演算器111と、前記トルク指令正規化モータ加速度矩形波乗算値平均値とモータ位置振幅を入力し慣性モーメント同定値を出力する慣性モーメント演算器113と、を備える。
(もっと読む)
モータ制御装置
【課題】 制御則によらずクーロン摩擦同定が実施でき、トルク指令またはモータ速度が雑音信号を多く含み、最大静止摩擦などが存在する場合にも高精度に微少動作でクーロン摩擦同定を実施することができ、その同定結果に基づいて高精度な動作制御を実施できるモータ制御装置を提供する。
【解決手段】トルク指令周波数成分と正規化速度矩形波を入力しトルク指令正規化速度矩形波乗算値を出力するトルク指令正規化速度矩形波乗算値演算器111と、前記トルク指令正規化速度矩形波乗算値とモータ速度振幅を入力しトルク指令速度矩形波乗算値平均値を出力するトルク指令速度矩形波乗算値平均値演算器114と、前記トルク指令速度矩形波乗算値平均値と前記モータ速度振幅を入力しクーロン摩擦同定値を出力するクーロン摩擦演算器115と、を備える。
(もっと読む)
サーボ調整方法および装置
【課題】機械の条件が変動しても、フィードバック制御系の安定を確保することができるするサーボ調整方法を提供する。
【解決手段】複数の異なる条件の下で、それぞれ前記フィードバック制御系の周波数伝達関数を表すゲイン、位相の周波数特性を測定し、各条件の周波数特性の測定結果に基づいて、各周波数におけるゲインの最大値と、位相の最小値とを求め、各周波数におけるゲインの最大値からゲインの最大抱絡線と、位相の最小値から位相の最小抱絡線を求め、ゲインの最大抱絡線、位相の最小抱絡線を基準にして、ゲインの調整を行う。
(もっと読む)
比較判定装置及び比較判定方法
【課題】プラントモデルを用いたダイナミックシミュレーションにおける予測の精度を高めることである。
【解決手段】シミュレーション装置10は、実プラントの測定データと、前記実プラントのプラントモデルのトラッキングモデル部113と同じプラントモデルの解析モデル部115によりシミュレーションされた将来の予測結果を示す予測データと、が記憶されるデータベース30から、前記測定データ及び前記予測データを読み出し、当該測定データ及び当該予測データの差分情報を算出し、当該差分情報に応じて当該差分情報に応じて測定データ及び予測データに誤差が発生したか否かを判定し、当該誤差が発生した場合に、トラッキングモデル部113の同定計算を行う同定モデル部114に、前記差分情報を前記同定計算に用いる誤差情報として出力する比較判定部112を備える。
(もっと読む)
PIDコントローラのチューニング装置、PIDコントローラのチューニング用プログラムおよびPIDコントローラのチューニング方法
【課題】PIDコントローラが、精度良くプロセスを制御できるようにする。
【解決手段】チューニング装置100では、コントローラ10とプロセス20から構成される実際のシステムの操業データを利用して、仮想のコントローラ51と仮想のプロセス52のモデル化を行い、そして、得られたプロセス52のモデルを用いて、コントローラ51の最適な制御パラメータを算出し、その値を参考に、実際のコントローラ10のチューニングを行う。
(もっと読む)
プラントの制御装置および火力発電プラントの制御装置
【課題】プラントの特性が未知の場合、ならびにプラントの特性変化や制御仕様変更に対して、評価関数を自動的に調整することにより、常に望ましい操作方法の学習を可能とするプラント制御装置を提供する。
【解決手段】学習対象であるプラントの特性を模擬するモデルを操作した結果得られるモデル出力及び評価関数に基づいて、評価関数パラメータを適切に調整し制御対象の特性に適した評価関数を計算する。計測信号データベース、プラントに操作信号を与えた時の計測信号値を推定するモデル、計測信号に該当するモデル出力が目標値を達成するように、操作信号に該当するモデル入力の生成方法を学習する操作信号学習手段、操作信号学習手段がモデルを操作した結果に対する、評価関数値を計算する評価関数計算手段、評価関数を計算する際に用いる評価関数パラメータを調整する評価関数調整手段を備える。
(もっと読む)
モデリング装置
【課題】
本発明は、温度制御系の伝達関数モデルを作成するモデリング装置に関し、入力時系列データと出力時系列データを取り違えずに温度制御系の正しいモデリングを行なう。
【解決手段】
入力時系列データと出力時系列データを、分子および分母の次数がフレキシブルな伝達関数にフィッティングすることにより伝達関数モデルを作成し、作成された伝達関数モデルの分子と分母の各次数を比較し、分子の次数の方が分母の次数よりも高い場合に、入力時系列データと出力時系列データを取り違えている可能性がある旨をユーザに通知する。
(もっと読む)
オートチューニング方法、温度調節器および熱処理装置
【課題】加熱冷却制御において、1回のオートチューニングによって、加熱側および冷却側の制御パラメータを得られるようにすることを目的とする。
【解決手段】加熱側の比例帯が2位置制御によるリミットサイクル波形の設定温度SPを基準とした昇温側の振幅Aupに比例する加熱側の算出式、および、冷却側の比例帯が、前記リミットサイクル波形の設定温度SPを基準とした降温側の振幅Adownに比例する冷却側の算出式をそれぞれ用いて、加熱側の比例帯および冷却側の比例帯を算出するようにしている。
(もっと読む)
プロセス制御ネットワークで用いられる最適自動チューナ
【課題】プロセス制御装置の制御に用いられるチューニングパラメータの最適な一組を生じさせ、プロセスや装置の特性を明確に特徴付けなくとも制御できるようにする。
【解決手段】コントローラ44により用いられる複数組のチューニングパラメータを生成し、ブロック化された正弦波信号のようなテスト信号rをコントローラに送り、これにより、複数組のチューニングパラメータの各組がコントローラ44により用いられている間にプロセス制御ループ30にテストサイクルを経させ、テストサイクルの各々の間にプロセス制御ループ30の応答値を測定する。測定された応答値に基づいて複数組のチューニングパラメータの各組に対する性能指数を計算し、計算された性能指数に基づいてチューニングパラメータの複数組のうちの一組を選択する。チューニングパラメータの選択された組は、プロセス制御ループ30の正規動作の間に用いられる。
(もっと読む)
1 - 20 / 35
[ Back to top ]