
Fターム[5H004KC46]の内容
フィードバック制御一般 (10,654) | 制御部 (1,337) | 適応制御 (647) | 同定器を有するもの (225) | セルフチューニングレギュレータ (12)
Fターム[5H004KC46]に分類される特許
1 - 12 / 12
設計装置及び設計プログラム
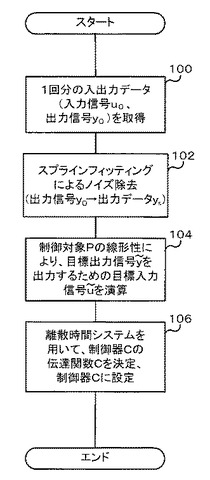
【課題】出力信号に含まれているノイズに係わらず、簡単な計算により最適な制御器を設計する。
【解決手段】入力信号u0を少なくとも1回入力して、制御対象Pから出力された出力信号y0を少なくとも1回計測することにより、少なくとも1回分の入出力データ(入力信号u0及び出力信号y0)を計測する。さらに、出力信号y0に対してスプラインフィッティングを行い、データを平滑化して、出力信号y0から雑音vを除去した出力データysを得る。さらに雑音vを除去した出力データysを線形独立なベクトルの組とし、制御対象Pの線形性に基づいて、目標出力信号y~との線形結合係数列θを算出し、当該線形結合係数列θを用いて、入力信号u0から目標入力信号u~を算出する。算出された1組の目標入力信号u~及び目標出力信号y~と参照モデルMに入力される参照信号r~との偏差e~から制御器Cの伝達関数を決定することにより、制御器Cを設計する。
(もっと読む)
規範応答演算装置およびそれを用いた車両用制駆動力制御装置

【課題】 規範応答のゲインおよび位相の特性を独立に設定できる規範応答演算装置およびそれを用いた車両用制駆動力制御装置を提供する。
【解決手段】 入力信号uに進み遅れ要素を与えて規範加速度応答のベース値を演算する線形フィルタ14と、入力信号uの微分値du/dtを出力する微分器15と、入力信号uの微分値du/dtに基づいて第1および第2ゲインy1,y2を演算する第1および第2非線形フィルタ17,18と、規範応答ベース値にゲインy1,y2を乗算して規範加速度応答を演算する乗算器19と、を備える。
(もっと読む)
ロバスト性マップからのプロセスコントローラのためのチューニングパラメータの決定方法
【課題】プロセス制御システム内のプロセスコントローラのための、チューニングパラメータの決定方法を提供する。
【解決手段】まず、プロセス制御ループの応答をシミュレートし、オーバーシュート、振動、応答時間等を表示(ステップ120)し、ロバスト特性を示す特性図としてのロバスト性マップを生成(ステップ130)し、プロット(ステップ132)する。ロバスト性マップがユーザに安定領域を示すために表示されるので、ユーザはロバスト性マップ上の安定領域内の点を選択する。このようにして、選択されたロバスト特性を有する制御ループを生成する新たなチューニングパラメータのセットが決定される(ステップ136)。さらに、これらの新たなチューニングパラメータを使用して制御ループをシミュレート(ステップ138)し、結果として得られる性能特性をユーザが見ることを可能とする。
(もっと読む)
モータ制御回路
【課題】モータの速度を可変制御するモータ制御回路において、設定されるモータの速度に応じた適切な制御ゲインを自動的に設定可能なモータ制御回路を提供する。
【解決手段】本発明に係るモータ制御回路10は、速度検出手段FGから入力される検出信号の周期FG_countと外部から入力される基準信号EXCの周期EXC_countとの差に応じた周期誤差信号を出力する周期誤差信号出力手段20と、周期誤差信号に速度ゲインを乗算して得られる速度誤差信号を出力する速度誤差信号出力手段22と、基準信号EXCの周期EXC_countに対する補正基準周期Ref_countの比を補正量とし、その補正量を2乗して速度誤差信号出力手段22が備える所定の速度ゲインKfに乗算することにより、所定の速度ゲインKfを補正するゲイン補正手段28、30とを備えている。
(もっと読む)
制御装置およびチューニング方法
【課題】大幅なコストの増加を伴うことなく、適切なチューニングを実現できるようにする。
【解決手段】制御装置1では、チューニングツール120からの開始指令を受けて、高速にアクセス可能な第2メモリ20に制御パラメータが記憶され、この制御パラメータが制御対象の制御時に参照されるようになる。そうすると、開始指令から終了指令までの間に実施されるチューニングでは、第2メモリ20の制御パラメータで示される具体的な値が順次変更されながら、各値について制御対象が制御され、その制御結果に応じて最適な制御パラメータが確定されていくことになる。さらに、このチューニングが実施されている間、第2メモリ20における制御パラメータへのアクセスは、そのアクセスに要する時間と、第1メモリにおける制御パラメータへのアクセスに要する時間と、の時間差に応じて遅延されるようになる。
(もっと読む)
プラント制御システムおよび制御方法
【課題】同定波形採取のための同定実験を行わず、プラントの立ち上げデータを用いてプラントの同定、及び、制御パラメータの調整を実現可能とするプラント制御システムを提供する。
【解決手段】システム支援ツール100は、制御装置200内の各部(MPC制御部210,PID制御部220)および制御対象230の起動制御を行って各部を起動する。各部を起動することで、制御量(PV),操作量(MV),設定値(SV)に関する各ゾーン毎のデータを、システム支援ツール100のデータロギング機能を用いて採取する。システム支援ツール100は、立ち上げデータを元に同定機能を用いて、プラントのモデルパラメータを推定する。そして制御パラメータ調整機能を用いて、モデル予測制御(MPC)部210及びPID制御部220に係る制御パラメータを同定結果のモデルパラメータを使って計算する。
(もっと読む)
同期制御装置
【課題】高周波のノイズ成分を増大させることなく主状態量のフィードバック値に含まれる位相の遅れ分をキャンセルするように位相を進め,現在の正確な主状態量が得られなくても,従制御対象の状態量を振動や遅れなく精度良く主制御対象の状態量に追従できる同期制御装置を提供する。
【解決手段】 主状態量が主状態量指令に一致するように主操作量を生成する主制御器と,前記主状態量と前記従状態量が同期するように従状態量指令を生成する従状態量指令生成器と,従状態量が従状態量指令に一致するように従操作量を生成する従制御器と,を備えた同期制御装置において,従状態量指令生成器は,主操作量と前記主状態量に基づいて主状態量よりも位相の進んだ位相進み主状態量を生成する位相進み補償演算器(11)と,位相進み主状態量を前記従状態量指令に変換する指令変換器(15)とを備えた
(もっと読む)
プロセスモデルの履歴管理方法および選択方法
【課題】複数のプロセスモデルを有する該プロセスモデル履歴を管理する。
【解決手段】第1および第2の優先度基準の組み合わせに基づいて、複数のプロセスモデルを体系化し、各プロセスモデルは、前記第1および前記第2の優先度基準に関連する値の組み合わせに応じて表され、前記体系化されたプロセスモデルのそれぞれと前記体系化されたプロセスモデルのそれぞれに共通の基準点との間の分離度を計算し、前記基準点は、前記第1および前記第2の優先度基準に関連する値を含み、除去の前に、除去されることになっているプロセスモデルと同一の制御ルーチンに関して同定されるプロセスモデルの総数が、制御ルーチンに関して同定される前記プロセスモデルの総数に関連する閾値を超える場合には、前記分離度に基づいて、前記モデル履歴からプロセスモデルを除去する。
(もっと読む)
応答時間による適応閉ループ制御アルゴリズム
適応閉ループ制御アルゴリズムを使用して流体の流れを制御するための、システムおよび方法が記述される。一実施形態は、設定値指標および/またはセンサによって生成されるセンサ指標を受け取るための方法を含む。閉ループ制御アルゴリズムの応答時間は、少なくとも1つの閾値が、センサ指標および/または設定値指標に基づいて満たされるときに、修正される。流量制御器によって実装される閉ループ制御アルゴリズムは、閉ループ制御アルゴリズムと関連する少なくとも1つのパラメータを調整することによって、閉ループ制御アルゴリズムの応答時間を修正することに応答して安定化する。  (もっと読む)
(もっと読む)
電動機の制御装置
【課題】物体移動系の高精度で比較的単純な数式モデルに基づいて、物体上の所望点(例えば加工点)の動作(速度、振動等)を高精度に制御できるようにする。
【解決手段】制御装置10は、物体12を移動させる電動機14を制御するものであって、物体の加速度を検出する加速度検出部16と、電動機の運転情報を取得する運転情報取得部18と、加速度検出部が検出した物体の加速度情報D1と運転情報取得部が取得した電動機の運転情報D2とに基づいて、物体の移動系Sの数式モデルMを決定するシステム同定部20と、システム同定部が決定した数式モデルを用いて、電動機の運転を制御する制御部22とを備える。システム同定部は、電動機の運転情報を操作入力とし、物体の加速度情報を観測出力として、移動系の高精度で比較的単純な数式モデルを決定でき、制御部は、そのような数式モデルを用いて、物体上の所望点の動作を適確に推定できる。
(もっと読む)
制御装置
【課題】 ΔΣ変調アルゴリズムまたはΣΔ変調アルゴリズムを用いることにより制御対象を制御する場合において、一方の変調アルゴリズムの入出力間での符号反転の際のむだ時間を低減することができ、制御対象の出力の目標値への収束性を向上させることができ、制御性を向上させることができる制御装置を提供する。
【解決手段】 制御装置1のECU2は、参照入力DSMVO2の制限値DSMVO2Lを、DSMVO2<-1のときにはDSMVO2L=-1(ステップ38)、1<DSMVO2のときにはDSMVO2L=1(ステップ40)、それ以外のときにはDSMVO2L=DSMVO2(ステップ41)として算出する。そして、この制限値DSMVO2Lを、ΔΣ変調アルゴリズムに入力することより、DSM出力DSMSGNSを算出し、DSM出力DSMSGNSに応じて、酸素濃度センサ15の出力Voutを目標値Vopに収束させるように、内燃機関3に供給される混合気の空燃比を制御する(ステップ1〜13,25,26)。
(もっと読む)
機械定数同定装置を備えたモータ制御装置
【課題】負荷慣性モーメントと粘性摩擦係数を独立に同定し、同定誤差が少ない、また、ノイズによる同定精度の劣化を抑えた機械定数同定装置18を備えたモータ制御装置を提供する。
【解決手段】トルク指令13を積分したトルク指令積分値とモータ速度7に基づいて、前記負荷慣性モーメント同定値と前記粘性摩擦係数同定値の演算処理をし、また、適応アルゴリズムに基づいて、前記演算処理をする同定演算器30を有した前記機械定数同定装置18を備える。
(もっと読む)
1 - 12 / 12
[ Back to top ]