
Fターム[5H004LA07]の内容
フィードバック制御一般 (10,654) | 制御対象の特性 (738) | 非線形要素を含むもの (53) | ヒステリシスを有するもの (11)
Fターム[5H004LA07]に分類される特許
1 - 11 / 11
アクチュエータ制御装置、アクチュエータ制御方法及びプログラム
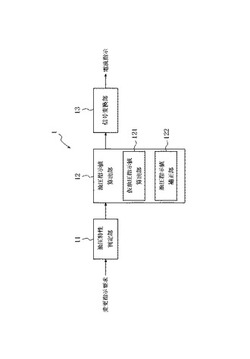
【課題】油圧アクチュエータを制御するアクチュエータ制御装置を提供する。
【解決手段】本発明のアクチュエータ制御装置は、作動油圧値を変更する旨の変更指示要求に応じて、この変更指示要求の作動油圧値がヒステリシス特性における移行特性の特性状態にあるか否かを判定する油圧特性判定部11と、油圧特性判定部11から得られる判定結果が移行特性の特性状態にある場合に、この移行特性について近似したモデル化移行特性に従って油圧指示値を算出する油圧指示値算出部12と、該油圧指示値を、アクチュエータを制御するための制御信号に変換する信号変換部13とを備える。
(もっと読む)
アクチュエータの角度伝達誤差補償方法

【課題】波動歯車減速機を備えたアクチュエータの角度伝達誤差に含まれている非線形弾性変形成分を効果的に抑制可能な補償方法を提案すること。
【解決手段】波動歯車減速機付きアクチュエータの角度伝達誤差に含まれる非線形弾性変形成分は、モータ軸の回転方向が変化した際に、可撓性外歯歯車の弾性変形により発生する角度伝達誤差の成分であるので、モータを正弦波状に駆動し解析を行うことができる。この解析結果から得られた非線形弾性変形成分モデル(非線形モデル)を用いて、モータ制御装置内にその補償のための関数あるいはデータを記憶させ、非線形弾性変形成分補償(θHys)をフィードフォワード補償用の補償入力(Nθ*TE)として、モータ軸角度指令(θ*M)に加える。この結果、非線形弾性変形成分(θHys)を効果的に低減でき、アクチュエータの位置決め精度を向上させることができる。
(もっと読む)
制御装置
【課題】可変バルブリフト装置をPI制御等のI項(積分項)を用いた制御方式で制御する場合に、可変バルブリフト装置の定常時のエネルギ消費量を低減できるようにする。
【解決手段】可変バルブリフト装置が定常状態のときに、目標リフト量を揺らぎ幅Wだけ上り時間Tupで増加させた後に上り時間Tupよりも長い下り時間Tdownで減少させて元の値に戻す処理を周期的に繰り返す揺らぎ制御を実行する。この揺らぎ制御では、目標リフト量の上り時間Tupよりも下り時間Tdownを長くすることで積分項の増加量よりも減少量を多くして積分項を元の値よりも減少させる処理を繰り返すことで積分項を徐々に減少させることができるため、ヒステリシス特性によって制御デューティがエネルギ消費量の大きい方の値になった場合でも、ヒステリシス特性による積分項の増加分を徐々に減少させて、制御デューティをエネルギ消費量の小さい方の値に収束させることができる。
(もっと読む)
温度制御方法および波長変換レーザ装置
【課題】電源投入直後に温度制御対象の温度が目標温度よりも行き過ぎて高くなることを抑制する。構成を簡単化する。
【解決手段】設定温度(Ts’)と対象温度(Tx)の偏差(ΔT)に基づいてペルチェ素子(27)をPID制御するPID回路(25)と、電源投入時には環境温度(Tc)を設定温度(Ts’)とし次いで所定の時定数の一次遅れの関数で環境温度(Tc)から目標温度(Ts)へと設定温度(Ts’)を変化させる温調回路(20)とを具備する。
【効果】偏差(ΔT)が常に小さな値に維持されるから過積分により電源投入直後に対象温度(Tx)が目標温度(Ts)よりも行き過ぎて高くなることを抑制できる。構成を簡単化でき、電池駆動などの小型でポータブルな波長変換レーザ装置においても有用である。
(もっと読む)
駆動量制御装置
【課題】スロットル弁の開度調整など制御対象の駆動量調整における応答遅れやずれを減少させることができる駆動量制御装置を提供する。
【解決手段】車両10のECU20は、スロットル弁16が停止している状態から目標開度DTHRが変化したとき、モータ18の動作開始に必要なモータ18の出力を算出し、不足分を補償した制御信号Scを出力する。
(もっと読む)
サーボ制御装置とその調整方法
【課題】 モータ制御装置単体でかつ、自動的に応答誤差調整を行なうことができるサーボ制御装置とその調整方法を提供する。
【解決手段】 位置制御器と、積分制御を有した速度制御器と、移動方向反転からの移動量を計測する移動量測定器(204)と、移動量が所定値に達するまで前記積分制御の積分ゲインを増加させる応答誤差補償器とを有するサーボ制御装置において、モデルに基づいて理想位置を演算する位置制御モデル部(201)と、モデル位置と実際位置との偏差から応答誤差を推定する応答誤差推定器(205)と、テストプログラムを実行した前記応答誤差を低減する積分ゲイン補正部(207)とを備えた。
(もっと読む)
プロセス工場向け自己診断プロセス制御ループ
適応可能プロセス制御ループを診断する方法は、プロセス制御ループ信号データを測定すること、プロセスループ信号データから複数のプロセス制御ループパラメータを生成すること、複数のプロセス制御ループパラメータの一つ又は複数から適応可能プロセス制御ループの状態を評価することを含む。プロセス制御ループデータは、適応可能プロセス制御ループがプロセス制御環境内でオンライン接続されているとき、適応可能プロセス制御ループ内の一つ又は複数のプロセス制御装置の通常動作の結果として生成される。自己診断プロセス制御ループは、プロセス制御ループの各構成部分及びプロセス制御ループ全体に対するプロセス制御ループパラメータに関する診断指標を受け取るように適応された診断ツールを含む。各診断指標は、対応する指標演算ツールにより信号データから生成される。診断ツールはさらに、診断指標の一つ又は複数からプロセス制御ループの状態を評価するようにも適応される。  (もっと読む)
(もっと読む)
システム同定装置
【課題】微小動作で電動機の粘性摩擦とクーロン摩擦を同定できるシステム同定装置を提供する。
【解決手段】速度指令発生器201、速度制御器202、トルク制御器203、電動機204、位置検出器205、微分器206、第1摩擦同定器位置207を備え、第1摩擦同定器位置207は、位置を入力しその入力信号振幅である位置振幅を出力する振幅演算器101と、速度指令と速度を入力し、入力エネルギを出力する第1入力エネルギ演算器102と、前記位置振幅と前記入力エネルギを入力し電動機204の粘性摩擦とクーロン摩擦である摩擦同定値を算出し出力する粘性摩擦クーロン摩擦演算器103を備える。
(もっと読む)
システム同定装置およびそのシステム同定方法
【課題】可動範囲の限定された負荷の付いた電動機の慣性モーメントと粘性摩擦を同定できるシステム同定装置およびそのシステム同定方法を提供する。
【解決手段】速度指令発生器201、速度制御器202、トルク制御器203、電動機204、位置検出器205、微分器206、慣性モーメント粘性摩擦同定器207を備え、慣性モーメント粘性摩擦同定器207は、トルク指令を入力しトルク指令振幅を出力するトルク指令振幅演算器101と、位置を入力し位置振幅を出力する位置振幅演算器102と、前記トルク指令振幅と前記位置振幅を入力し慣性モーメント粘性摩擦同定値を算出し出力する第1慣性モーメント粘性摩擦演算器103を備える。
(もっと読む)
機械特性モデル化装置、電動機制御装置、機械制御システムおよび機械特性モデル化方法
【課題】機械モデル化に誤差が生じないように摩擦を考慮できるようにする。
【解決手段】周波数特性演算装置6と、機械モデル推定手段10と、周波数特性ピーク検出手段11と、減衰推定値解析手段12とを備え、機械特性モデル7には剛体負荷モデル8と摩擦モデル9と、さらに、共振モデル18と反共振モデルと減衰モデル20とを備えた振動系モデル17を備え、最小二乗法もしくは曲線適合により周波数特性から機械モデルを求める。
(もっと読む)
制御装置
【課題】制御対象の非線形特性および周波数特性の少なくとも一方が変化したときでも、制御分解能および制御精度をいずれも高いレベルに維持することができる制御装置を提供すること。
【解決手段】位相制御入力Ucainによりカム位相Cainを制御する制御装置1は、2つのコントローラ102,103を備える。2自由度応答指定型コントローラ102では、追従制御入力Rsldが、カム位相を目標カム位相Cain_cmdに追従させるように制御するための値として算出される。DSMコントローラ103では、追従制御入力Rsldを変調することにより、位相制御入力Ucainが算出されるとともに、その際、位相制御入力Ucainの演算周期が、エンジン回転数NE、カム位相CainおよびバルブリフトLiftinに応じて、2つの演算周期ΔT1,ΔT2の中から選択される。
(もっと読む)
1 - 11 / 11
[ Back to top ]