
Fターム[5H004MA13]の内容
フィードバック制御一般 (10,654) | 制御装置の具体的構成 (550) | フィルタ (186) | ハイパスフィルタ (18)
Fターム[5H004MA13]に分類される特許
1 - 18 / 18
電動機制御装置
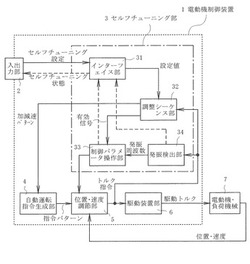
【課題】実操業時に速度パターンや負荷等が変動する場合にも、制御パラメータを常に最適値に調整可能として安定した制御応答が得られるような電動機制御装置を提供する。
【解決手段】電動機の状態量に関する加減速パターン等の指令パターンを出力する自動運転指令生成部4と、前記状態量をフィードバックして前記指令パターンに追従させるように制御する位置・速度調節部5と、前記状態量に基づいて調節部5における制御パラメータを変更する制御パラメータ操作部33と、を備え、電動機により負荷機械を駆動しながらパラメータ操作部33により制御パラメータを最適値に調整する電動機制御装置において、負荷機械の状態に応じて前記指令パターンを変化させる。
(もっと読む)
適応ノッチフィルタ及びそれを用いた共振抑制装置

【課題】小さい演算負荷で自動的に中心周波数を更新することができる適応ノッチフィルタ及びそれを用いた共振抑制装置を提供する。
【解決手段】適応ノッチフィルタ10は、共振が生じ得る制御対象への制御入力を生成するための信号に含まれる当該制御対象の固有振動数成分を抑制するよう構成されており、中心周波数を変更可能であるノッチフィルタ12と、入力信号の周波数と中心周波数の現在値との大小関係に対応する位相特性を有し、制御入力を生成するための信号を入力信号とする位相差フィルタ16と、大小関係に応じて中心周波数修正量の平均値の符号が決定されるように位相差フィルタ16の入力信号及び出力信号を用いて定義された中心周波数修正量を演算し、該中心周波数修正量に基づき中心周波数を更新する修正演算部18と、を備える。
(もっと読む)
プロセス制御システムにおいて電空コントローラを位置トランスミッタに連結する方法および装置
プロセス制御システムにおいて電空コントローラを位置トランスミッタに連結する例示の方法および装置が開示される。開示された例示の装置は、第1の接続部および電源に連結された第2の接続部を有する位置トランスミッタと、位置トランスミッタの第1の接続部に連結された少なくとも第1の接続部を含む電空コントローラと、電空コントローラの第1の接続部と第2の接続部とを連結するレジスタとを含む。 (もっと読む)
フィードバック制御装置
【課題】制御対象の状態が大きく変化する場合に、制御対象の出力検出値に含まれる揺動成分を確実に除去して、操作量の不必要な振動を回避する。
【解決手段】フィードバック制御を行う制御装置50において、制御対象14へ入力する操作量ICMDに基づいて制御対象14の出力を推定する制御対象モデル63aと、推定した出力と制御対象の検出値θcsとから算出した出力θ1から検出値θcsに含まれる検出値揺動量を算出するためのバンドパスフィルタ63c〜63eと、を備え、制御対象14の状態変化が大きくなるほど通過帯域幅を広げ、制御対象の状態変化が小さくなるほど通過帯域幅を狭める。
(もっと読む)
外乱振動抑制制御器
【課題】パラメータ設定に多くの工数を要することなく、外乱により発生する振動を抑制する効果を最大化できる外乱振動抑制制御器を得る。
【解決手段】ローパスフィルタを内在し、目標電圧Vref及び検出電流信号Iactに基づいて推定外乱電圧Vestを演算する外乱電圧推定オブザーバ61と、推定外乱電圧Vestの低周波成分をカットした信号Vest_HPを演算するハイパスフィルタ62と、Vest_HPにゲインKWを乗じて目標外乱抑制電圧Vref_wを演算する外乱電圧制御器(外乱制御器)63とを設け、前記ローパスフィルタのカットオフ周波数とハイパスフィルタ62のカットオフ周波数の積の平方根が外乱周波数と一致するように、前記ローパスフィルタ及びハイパスフィルタ62のカットオフ周波数を設定する。
(もっと読む)
搬送用制振制御システムのフィ−ドバックコントロ−ラ
【課題】搬送時に搬送物に生じる振動を防止し、かつ制御系の設計及びコントロ−ラの導出も平易な搬送用制振制御システムのフィ−ドバックコントロ−ラを提供する。
【解決手段】 フィ−ドバックコントロ−ラの形を、少なくともノッチフィルタ若しくはロ−パスフィルタを有する周波数制御要素と位置制御要素の組み合わせに限定し、そのフィ−ドバックコントロ−ラの要素の値を最適に与えるために、設計仕様を周波数仕様と時間仕様の両方で与える。
(もっと読む)
サーボ制御ループのためのプリフィルタおよびその応用
【課題】エラー制御信号はしばしばそれ自身がエラーを有し、所定の周波数範囲においてしか信頼できない。
【解決手段】サーボ制御ループを用いてリソグラフィ装置のエラー制御モジュールの位置を制御する方法、システムおよびコンピュータプログラムが説明される。システムは、フィルタと、フィルタとつながれ制御信号を受け取るサーボコントローラと、サーボコントローラとつながれエラー制御モジュールの位置を制御するアクチュエータと、を有する。フィルタは、サーボ制御ループの前段において、制御信号の振幅と位相を所望の周波数範囲で変調することによって、制御信号をフィルタする。
(もっと読む)
プラントの制御装置
【課題】 制御対象の動特性変化の大きい場合、外乱が大きい場合、あるいは制御対象が非線形特性を有する場合において十分なロバスト性及び安定性を有するスライディングモード制御を行うことができるプラントの制御装置を提供する。
【解決手段】 スライディングモード制御器101、減算器102、及び周波数整形制御器103により、制御対象100への制御入力となる最終操作量UFMを算出する。減算器102、周波数整形制御器103、及び制御対象100からなるブロックを拡大制御対象110とし、拡大制御対象110の伝達関数FX(s)が所望の目標伝達関数F(s)となるように、周波数整形制御器103の伝達関数H(s)が設定される。CS角度CSAがCS角度指令値CSACMDと一致するようにフィードバック制御が行われる。
(もっと読む)
振動低減装置のコントローラの設計方法、振動低減装置のコントローラ及び振動低減装置
【課題】騒音抑制や速応性などに関する制御性能およびロバスト安定性の両面を考慮して複数の周波数帯域の振動の低減をそれぞれ対応して制御する複数のコントローラの設計方法等を提供することにある。
【解決手段】複数のコントローラのうち1つのコントローラについて、1つのコントローラを除く他の1以上のコントローラでフィードバックした状態で1つのコントローラの制御対象からモデル誤差を求め、当該モデル誤差を用いてロバスト安定性を満たす重み関数を求めて1つのコントローラを設計する。これにより、周波数帯域を分割して各帯域のモデルを低次元で同定することができ、モデル化のための計算時間の短縮、モデル化精度の向上を達成することができる。各帯域用コントローラは、それぞれの帯域に対応した低次元モデルから設計されるため、制御系設計の高効率化を図ることができると同時に設計されるコントローラも低次元で構成することができる。
(もっと読む)
制御装置
【課題】プラントモデルがむだ時間を含む2次以上の高次遅れ系であっても、演算負荷を従来より軽減できるようにする。
【解決手段】制御対象(触媒+下流側排気ガスセンサ)を模擬するプラントモデルは、むだ時間を含む2次遅れ系で近似すると共に、2次遅れ系は、2つの1次遅れ系に分割して離散化した後結合して近似する。制御対象の入力をプラントモデルに入力した時のプラントモデル出力と制御対象の実出力との差である同定誤差をゼロに近付けるようにモデルパラメータを同定する。同定したモデルパラメータに含まれるむだ時間の一部の情報の変化に基づいてむだ時間を制御対象の実むだ時間に近付けるように推定する。
(もっと読む)
サーボ制御装置
【課題】周期的に繰り返される目標値や外乱に対する制御誤差を、効果的に低減するサーボ制御装置を提供する。
【解決手段】安定補償回路106を、カットオフ周波数=繰り返し周波数×4の1次ローパスフィルタ201、カットオフ周波数=繰り返し周波数/4の1次ハイパスフィルタ202、ゲイン0.8の減衰器203を直列接続して構成し、安定補償回路106の繰り返し周波数における位相を0とすることにより、繰り返し補償回路102のピークゲイン周波数が、繰り返し周波数に一致させ、周期的に繰り返される目標値や外乱に対する制御誤差を、効果的に低減することを実現する。
(もっと読む)
PWM制御の状態検出装置及び方法、並びにこれを用いた自動車エンジンの防振装置
【課題】高周波及び低周波のノイズに影響されることなく、正確にPWM制御の状態を検出することのできるPWM制御の状態検出装置、及び検出方法を提供する。
【解決手段】負荷装置2を駆動する駆動装置3へ供給されるパルス幅変調された制御パルス信号Poと、フィードバック信号Pfとに基づいて、PWM制御の状態を検出するPWM制御の状態検出装置10であって、以下を備える。フィードバック信号Pfに重畳される高周波ノイズを除去する高周波除去手段13を備えると共に、制御パルス信号Poに対してフィードバック信号Pfが正常であるか否かを判定する第一判定手段11と、低周波ノイズの影響を含む可能性のある第一判定手段11の判定結果R1から低周波ノイズの影響を抑制する低周波除去手段14を備えると共に、判定結果R1に基づいてPWM制御が正常であるか否かを判定する第二判定手段12と、を備える。
(もっと読む)
電動機の制御装置
【課題】状態量指令値に影響されずに機械共振を自動的に抑制すること。
【解決手段】電動機1によって駆動される負荷4の速度を速度指令値に追従させる際に、速度制御手段6の出力信号の機械共振周波数成分を通過させるHPF9と、所定周波数以下の周波数を含む基準信号を出力する基準信号発生器10と、この出力基準信号を手段6の出力信号に加算する加算器11と、この加算出力信号を入力とし、且つフィルタ係数を変化させることにより入出力特性を変更可能な仮想フィルタ12と、この出力信号が前記基準信号に近づくように仮想フィルタ12のフィルタ係数を修正する仮想フィルタ設定部14とを備えて電動機の制御装置を構成する。
(もっと読む)
機械定数同定装置を備えたモータ制御装置
【課題】負荷慣性モーメントと粘性摩擦係数を独立に同定し、同定誤差が少ない、また、ノイズによる同定精度の劣化を抑えた機械定数同定装置18を備えたモータ制御装置を提供する。
【解決手段】トルク指令13を積分したトルク指令積分値とモータ速度7に基づいて、前記負荷慣性モーメント同定値と前記粘性摩擦係数同定値の演算処理をし、また、適応アルゴリズムに基づいて、前記演算処理をする同定演算器30を有した前記機械定数同定装置18を備える。
(もっと読む)
制御装置及び制御方法
【課題】 本発明は外乱によりステージが重心を中心にθ方向に回動したときの計測値から外乱成分を除去することを課題とする。
【解決手段】 メイン演算処理部70では、減算器72,74,76で各X,Y,θ軸毎の目標位置とレーザ干渉計18〜20の計測値との偏差を求め、この偏差がコントローラKx(s),Ky(s),Kθ(s)に供給される。コントローラは、各X,Y,θ軸毎の駆動トルクの制御値を演算する制御値演算手段78を有する。補正演算処理部80では、レーザ干渉計18〜20の計測値が供給されると共に、θ方向の外乱成分に対応した補正値KX(s)(θM yM),Ky(s)(θM xM)を算出する外乱成分演算手段81と、加算器82、減算器84でθ方向の補正値を基本軸であるX軸、Y軸の制御値fD1 fD2に加算、減算して重心基準のトルクに相当する制御値fx0
fy0を生成する補正手段86とを有する。
(もっと読む)
磁力支持天秤装置における低周波域ゲイン倍加制御
【課題】 本発明の課題は、磁力支持天秤装置においてシステムの安定性を損なうことなく、空気力または流体力により加振された模型揺動を小さくする制御手法を開発して提示することにある。
【解決手段】 本発明の制御システムは、磁気力によって物体を空間に支持する装置のフードバック制御系において、センサーで検出した物体の位置情報から高周波成分を除去するローパスフィルターと、該ローパスフィルターの出力を入力する二重位相進み手段と、前記二重位相進み手段の出力信号を目標設定値に対して減算する手段とを備え、既存のフィードバック制御系よりも低周波域の制御性能を向上させるようにした。
(もっと読む)
連続鋳造機の鋳型内湯面レベル制御方法及び連続鋳造鋳片の製造方法
【課題】 外乱補償器を備えた湯面レベル制御装置を用いて外乱補償器の設定周波数を変更しながら鋳型内湯面レベルを制御するに当たり、外乱補償器を周波数に応じて切り替えたり、外乱補償器を制御系から切り離したりすることをせず、外乱補償器の設定周波数を変更しながら湯面レベルを制御する。
【解決手段】 鋳型内の湯面レベルを検出する湯面レベル計5と、湯面レベル計により検出される湯面レベルと予め設定した設定湯面レベルとに基づいてスライディングノズル3の開度指令を出力する制御装置6と、湯面レベル計により検出される湯面レベルに基づいて或る特定の周波数帯の外乱を補償するための制御演算を行う外乱補償器8と、を備えた湯面レベル制御装置を用いて制御する際に、前記外乱補償器の設定周波数を鋳造速度に基づいて変更する。
(もっと読む)
蒸気圧縮システムの超臨界圧力調整
蒸気圧縮システムは、圧縮器とガス冷却器と膨張装置と蒸発器とを含む。閉回路となるシステム内を冷媒が循環する。冷媒としては二酸化炭素が使用されることが好ましい。蒸気圧縮システムの性能係数を最適化するため、適応制御が採用される。システムが時間の経過とともに変化すると、システムを作動させるモデルが修正される。モデルは、可変係数を含む適応制御アルゴリズムによって決定される。モデルが変化すると、適応制御アルゴリズムの変数が変化する。それから、システムの高圧、そして性能係数を調整するために、ガス冷却器の制御装置が調節される。第一の実施例では、適応制御アルゴリズムの変数を修正して性能係数を最適化するのに、最小平均二乗法(LMS)が使用される。第二の実施例では、変化の遅い周期的加振法によって性能係数が最適化される。第三の実施例では、最適性能係数を見つけるために三角法が使用される。  (もっと読む)
(もっと読む)
1 - 18 / 18
[ Back to top ]