
Fターム[5H105GG18]の内容
電気的推進車両の集電装置 (4,133) | 集電装置及び給電装置の監視 (293) | 監視対象及び現象 (109) | 集電部支持装置 (23) | 上昇、下降及び押圧 (19)
Fターム[5H105GG18]に分類される特許
1 - 19 / 19
電気駆動ダンプトラック
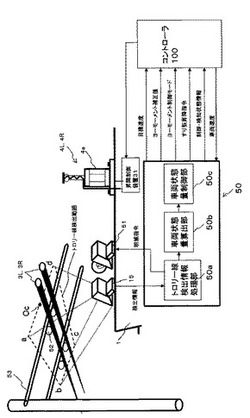
【課題】トロリー走行中のドライバの操作負担を軽減することのできる電気駆動ダンプトラックを提供する。
【解決手段】
車両制御装置50と、コントローラ100と、インバータ制御装置30と、操舵制御装置32は、トロリー線検出装置(カメラ)15により検出した情報に基づいて、集電装置4L,4Rのすり板4La,4Raの昇降を制御する制御装置を構成する。また、この制御装置は、トロリー線検出装置により検出した情報に基づいて、すり板とトロリー線3L,3Rとの位置関係を演算し、すり板がトロリー線に接触する所定の範囲を外れたときは、すり板を上げる操作を禁止するか、すり板が上がっている場合はすり板を下げるよう制御する。
(もっと読む)
接触力制御方法及び接触力制御装置

【課題】電車線路の摩耗を低減させる新しい技術を提案すること。
【解決手段】パンタグラフ2にすり板13とトロリ線14との接触力Fを計測する接触力計測部20を設ける。接触力制御装置30は、計測された接触力Fが予め設定された閾値Fth以下になった場合に、エアスプリング制御装置16へエアスプリング12に接触力Fを増加させる制御をさせる指令を出す。閾値Fthには、すり板13とトロリ線14とが離線する前の比較的弱い接触力条件で最もトロリ線14が摩耗する接触力領域を上回る接触力値が設定される。
(もっと読む)
接触力制御方法及び接触力制御装置、並びに、集電装置における接触力制御方法及び接触力制御装置
【課題】 電気車両に電車線から摺動集電部材を介して集電する集電装置における接触力の制御装置であって、接触力を直接測定しなくても高い周波数まで接触力の制御が可能な接触力制御装置などを提供する。
【解決手段】 集電装置の接触力制御装置20は、摺動集電部材13を電車線3に押し当てるアクチュエータ21と、アクチュエータ21への入力電流を測定する電流計23と、アクチュエータ21の出力変位を測定するセンサ25と、アクチュエータ21の駆動回路27と、電流計23及びセンサ25の測定値が入力されるとともに、アクチュエータ駆動回路27を制御する制御部30と、を備える。制御部30は、接触力の指令値を設定する設定部、センサの計測値から接触力の実際の値を推定する推定部、及び、現在における接触力指令値と推定値とを比較し、後者を前者に合わせるようにアクチュエータ駆動回路27を制御するアクチュエータ制御部、を有する。
(もっと読む)
懸垂がいしのピン結合箇所に設ける回転ピンダンパー
【課題】 電線張力が過大となるような場合にも、がいしのピン結合箇所における回転運動を抑制し、電線の損傷・断線を防止する懸垂がいしのピン結合箇所に設ける回転ピンダンパーを提供する。
【解決手段】 懸垂がいしのピン結合箇所に設ける回転ピンダンパーにおいて、相対運動が可能な固定金具間又は結合ピン3と固定金具1,2との間に、磁気粘性流体5D,5Eを塗布した磁気ダンパー5を配置する。
(もっと読む)
ワイヤレス充電装置およびワイヤレス充電システム
【課題】送電をケーブルを用いることなくワイヤレスで行うことができることはもとより、受電側との距離があったとしても機構の複雑化を招くことなく、簡単な構成で高効率で送電することが可能なワイヤレス充電装置およびワイヤレス充電システムを提供する。
【解決手段】充電のための電力を送電する送電デバイス230を含むワイヤレス充電装置200と、ワイヤレス充電装置200から送電された電力を、磁界共鳴関係をもって受電する受電デバイス310を含み、受電した電力をバッテリに充電する受電装置300と、ワイヤレス充電装置200の送電デバイス230の送電電力を中継可能な中継デバイス240と、を有する。
(もっと読む)
架線・バッテリハイブリッド車両のパンタグラフ誤動作防止装置及び方法
【課題】架線有区間・架線無区間を正確に知り、その情報に基づいてパンタグラフの上げ下げを行う、架線・バッテリハイブリッド車両のパンタグラフ誤作動防止装置を提供する。
【解決手段】沿線に沿って所定の間隔を開けて設けられた電柱Pには、応答器T(位置情報タグ)が設置されている。この位置情報タグには、停留所、充電所、架線区間、非架線区間など位置情報が含まれている。一方、架線・バッテリハイブリッド車両は、走行用パンタグラフ1及び充電用パンタグラフ3を有し、質問器と、質問器で位置情報タグから読み出された情報から位置情報を得る位置検知装置が搭載されている。この位置検知装置で得られた位置情報から、車両が現在又は近い将来において走行する区間が架線区間であるか、無架線区間であるか、充電停留所であるかを判定し、その判定に応じて車両のパンタグラフ1、3の上げ下げや、ロック操作(位置固定操作)を制御する。
(もっと読む)
パンタグラフ昇降制御装置
【課題】蓄電池搭載電車において、充電が未了となること及びパンタグラフ、架線、及び道路設備建築物を破損してしまうことを防ぐ。
【解決手段】本発明のパンタグラフ昇降制御装置は、パンタグラフの上昇と下降を行うパンタグラフアクチュエータを制御する。昇降信号生成部が、架線検知部から架線の存在を検知することを示す架線検知信号を受け、停車判断部から車両が停止状態であることを示す停車判断信号を受け、力行判断部から力行ノッチがゼロであることを示す力行ノッチ判断信号を受け、充電要求判断部から充電要求信号が充電要求をするものであることを示す充電要求判断信号を受け、且つパンタグラフ位置センサからパンタグラフの高さ位置が第1の設定高さより小さいことを示すパンタグラフ低位置信号を受けたとき、パンタグラフアクチュエータに対して、パンタグラフ上昇信号を出力する。
(もっと読む)
パンタグラフの接触力調整方法及びパンタグラフ
【課題】舟体(摺り板を含む)とトロリ線との間の接触力を適正な範囲内に収めることができるパンタグラフを提供する。
【解決手段】パンタグラフの舟体5は、一例として鈍頭型であり、前縁部の上下にそれぞれ設けられた可動式の凹凸手段(ラフネス)7A、7Bを備えている。トロリ線と摺り板6との間の接触力が所定の上限値を超えた場合には、下側のラフネス7Bを突出させて前記舟体の下面側の気圧を低下させる。一方、接触力が所定の下限値を下回った場合には、上側のラフネス7Aを突出させて前記舟体の上面側の気圧を低下させる。これにより揚力を調整することができ、舟体の接触力の調整が可能となる。
(もっと読む)
パンタグラフ揚力推定システムおよび推定方法
【課題】 車両の走行時に架線を摺動するパンタグラフの揚力を推定する。
【解決手段】 揚力推定システムは、測定区間(−ε<x<ε)の間に存在する、トロリ線と連結されたハンガのハンガ軸力hi(i=1,2,・・・,n)および測定区間の両端における傾斜(∂y/∂xx=+ε、∂y/∂xx=−ε)をそれぞれ示すデータを記憶した記憶装置22と、ハンガ軸力、傾斜を示すデータから接触力f(t)を算出する接触力演算部28と、接触力f(t)の時間平均値M(f(t))を算出し、接触力の時間平均値M(f(t))に基づいて、fL=M(f(t))−f0(f0:パンタグラフの静押上力)により、揚力fLを算出する揚力演算部30と、を備える。
(もっと読む)
パンタグラフの接触力測定方法及び接触力測定装置
【課題】より少ない数のセンサで精度のよい接触力測定を行うことができるパンタグラフの接触力測定方法及び接触力測定装置を提供する。
【解決手段】本発明は、すり板体110を舟体120に対して支持するすり板体付勢バネ112の反力を、FBGセンサを有するひずみゲージによって求め、反力に基いて舟体120に対するすり板体110の相対変位を求めてこれを二階微分して相対加速度を算出する。これによって、すり板体110に加速度センサを設けることなくすり板体110の慣性力を測定することができ、少ないセンサで精度のよい接触力測定を行うことができる。
(もっと読む)
荷重測定装置及びすり板の接触力測定装置
【課題】狭い空間内に簡単に設置可能であり改造が容易で測定精度を向上させることができる荷重測定装置及びすり板の接触力測定装置を提供する。
【解決手段】接触力測定装置24は、すり板片12aとトロリ線1aとの間に作用する接触力Cを測定する装置である。荷重受け部26は、すり板片12aから接触力Cを受ける部分であり、すり板片12aと弾性支持部22との間に着脱自在に装着されている。受け部側接触部26aは、すり板側接触部25から接触力Cを受けて弾性変形する部分であり、装着部26bはすり板片12aと弾性支持部22との間に間隙部Δを形成するように、これらの間に着脱自在に装着される部分である。荷重検出部27は、荷重受け部26に作用する接触力Cを検出する部分であり、受け部側接触部26aの歪みに応じて反射光の波長が変化する光ファイバ式の歪みゲージを備えている。
(もっと読む)
架線・バッテリハイブリッド車両のパンタグラフ誤動作防止装置及び方法
【課題】 架線有区間・架線無区間を正確に知り、その情報に基づいてパンタグラフの上げ下げを行う、架線・バッテリハイブリッド車両のパンタグラフ誤作動防止装置を提供する。
【解決手段】 沿線に沿って所定の間隔を開けて設けられた電柱Pには、応答器T(位置情報タグ)が設置されている。この位置情報タグには、停留所、充電所、架線区間、非架線区間など位置情報が含まれている。一方、架線・バッテリハイブリッド車両は、走行用パンタグラフ1及び充電用パンタグラフ3を有し、質問器と、質問器で位置情報タグから読み出された情報から位置情報を得る位置検知装置が搭載されている。この位置検知装置で得られた位置情報から、車両が現在又は近い将来において走行する区間が架線区間であるか、無架線区間であるか、充電停留所であるかを判定し、その判定に応じて車両のパンタグラフ1、3の上げ下げを制御する。
(もっと読む)
パンタグラフの集電方法及び装置、並びに電動式パンタグラフの実装方法及び装置
【課題】電動式パンタグラフの実装を可能にし、すり板とトロリー線の接触力の変動を早い速度で精度よく抑制し、構成を簡略化してメンテナンスを軽減し、万一電動アクチュエータが故障した場合にもパンタグラフの機能を維持してパンタグラフの信頼性を高める。
【解決手段】少なくともすり板11が先端ばね12で支持された弾性支持装置9を電車屋根部7に配置してすり板11をトロリー線6に押付けて集電を行う際に、弾性支持装置9を押付緩衝装置と電動アクチュエータ19の両方を用いて電車屋根部7に支持し、すり板11に設置した加速度計24と先端ばね12に設置した歪み計25の信号に基づいたH∞制御器23からの制御信号uにより電動アクチュエータ19を駆動して、すり板11とトロリー線6との接触力の変動が抑制されるようにすり板11の押付け力を制御する。
(もっと読む)
パンタグラフ揚力調整方法、パンタグラフ、及びパンタグラフの製造方法
【課題】精度良くパンタグラフの揚力特性を改善することが可能なパンタグラフの調整方法、パンタグラフ、及びパンタグラフの製造方法を提供すること。
【解決手段】パンタグラフ揚力特性=aυ2−bυ4…(1)によって算出されたパンタグラフの揚力特性を用いて、パンタグラフの揚力を調整する。このとき、パンタグラフに対する直交流の速度の4乗に比例する下向きの力を加算しているため、精度良くパンタグラフ揚力特性を求めることができる。
(もっと読む)
パンタグラフ揚力測定装置
【課題】 気流による影響を受けず空力音と同時にパンタグラフ揚力を正確に測定することができるパンタグラフ揚力測定装置を提供する。
【解決手段】 ダンパ装置14を取り外し、主軸6のてこ部6dに連結部17を固定するとともに台枠13の固定部13eに連結部18を固定して、パンタグラフ揚力検出部16及び連結部17,18がパンタグラフ1に装着される。連結部17,18と間隔調整部18cとの噛み合い量を調整すると、パンタグラフ1の姿勢が変化し集電舟3の高さが調整される。パンタグラフ揚力検出部16及び連結部17,18が風防部12に覆われているため気流の影響を受けず、空気力が作用するのを防ぐことができるとともに、空力音が発生するのを防ぐことができる。その結果、パンタグラフ揚力検出部16が気流の影響を受けないため、パンタグラフ揚力と騒音を同時に正確に測定することができる。
(もっと読む)
低床LRV用低電圧高電流レール集電用接触子
【課題】停車中に大電流通電が可能な停車専用集電接触子を有する低床LRV用低電圧高電流レール集電用接触子を提供する。
【解決手段】低床LRV用低電圧高電流レール集電用接触子において、主要機器を車上に搭載した低床LRV2の台車枠の中央部の下部に昇降自在に配置される広い接触面を有するレール集電用接触子4と、低床LRV2の停車時に前記レール集電用接触子4を下降させてレールに前記広い接触面を接触させ、許容集電電流を増大させ、大容量バッテリーへの大電流短時間充電を可能にする。
(もっと読む)
交流電気車パンタグラフ上昇制御装置、及び交流電気車のパンタグラフ上昇制御方法
【課題】 交流電気車のパンタグラフ上昇時のサージ性過電圧を防止し得る装置及び方法を提供する。
【解決手段】 カギ着脱装置73を操作して集電舟を上昇させ、摺板がトロリ線に当接する前に降下用空気シリンダ装置72を操作して集電舟をいったん降下させるとともにカギ着脱装置73を操作してカギフック73aを天井ヒンジ55近傍に係合させた後、降下用空気シリンダ装置72のシリンダ72a内に圧縮空気が残存している期間内にカギ着脱装置73を再度操作して係合されたカギフック73aを外し、主ばね71の付勢力とシリンダ内残存空気のダンピング作用により摺板の上昇速度を規制し、摺板とトロリ線の当接により車体を伝搬するサージ性過電圧を抑制する。
(もっと読む)
車両の騒音反射防止装置とその騒音反射防止方法
【課題】 簡単な構造によって遮音板で反射する集電系騒音などを低減することができる車両の騒音反射防止装置とその騒音反射防止方法を提供する。
【解決手段】 (A)に示すように、下り線2Aを車両4が走行するときには、遮音板6を出現させ遮音板7を格納する。一般に、下り線2Aを車両4が走行するときには、この下り線2Aに近い沿線W1側がこの下り線2Aから遠い沿線W2側よりも騒音対策の優先度が高く騒音対策が重要視される。このため、遮音板7が格納されるとこの遮音板7が集電系騒音を沿線W1側に反射することがなくなり、沿線W1側の騒音が低減する。一方、(B)に示すように、下り線2Aを走行していた車両4が終着駅で折り返して上り線2Bを走行するときには、遮音板6を格納し遮音板7を出現させる。
(もっと読む)
集電装置の揚力調整構造
【課題】 集電舟からの空気の排出方向を調整可能な簡単な構造によって集電装置に作用する揚力を調整することができる集電装置の揚力調整構造を提供する。
【解決手段】 集電装置全体として組み上げた状態で風洞試験を実施する場合には、集電舟単体で風洞試験を実施する場合に比べて、他の部品と干渉して流れ場が変化するため、集電装置に作用する揚力を適正値に調整する必要がある。このため、複数の空気排出口11にそれぞれ装着された各排出方向調整部13の回転角度θ1を調整して、各空気排出口11からの空気の排出方向を調整する必要がある。例えば、集電舟8を下降させる方向の揚力が集電装置に作用するときには、排出方向調整部13の回転角度θ1を調整して噴射口13bを下方に向け、集電舟8から下方に空気が排出するように調整される。その結果、集電舟8を下降させる方向の揚力が低下して、集電装置に作用する揚力が適正値に調整される。
(もっと読む)
1 - 19 / 19
[ Back to top ]