
Fターム[5H115QN02]の内容
車両の電気的な推進・制動 (204,712) | 制御、演算 (10,339) | デジタル要素を含むもの (5,066) | 計算機を用いるもの (5,052)
Fターム[5H115QN02]の下位に属するFターム
メモリを用いるもの (4,377)
Fターム[5H115QN02]に分類される特許
661 - 675 / 675
車両のモータトルク制御装置

【課題】 駆動力を検出するセンサを用いることなく、車両の加減速過渡時における駆動系慣性の影響等を排除し、所望の車両加減速を得ることができる車両のモータトルク制御装置を提供すること。
【解決手段】 少なくとも1つのモータジェネレータを動力源の1つとし、一定変速比もしくは可変変速比の変速機を介してタイヤに動力を伝達して走行するハイブリッド車において、変速機の出力軸回転速度を検出する車速センサ8と、出力軸回転速度と目標モータトルクを入力し、タイヤ軸から変速機へのトルク反力を外乱として推定する外乱推定手段61と、前記外乱推定値を駆動力推定値とし、運転者やシステムからの要求に応じて設定された目標駆動力と駆動力推定値との偏差がなくなるように駆動力制御トルクを演算する駆動力制御手段62と、駆動力制御トルクに応じて前記モータジェネレータへ出力する目標モータトルクを演算する目標モータトルク演算手段64と、を有する第1モータトルク制御手段を設けた。
(もっと読む)
ハイブリッド車およびその制御方法

【課題】 エンジンからの動力とモータからの動力とにより走行可能なハイブリッド車において、駆動輪の空転によるスリップが生じたときにスリップを抑制すると共にバッテリの過大な電力による放電を伴うことなく運転者が要求する駆動力を出力する。
【解決手段】 モータ走行中に駆動輪のいずれかに空転によるスリップが生じたときにはモータの回転軸の回転角加速度αに基づいて設定されるトルク上限値Tslipによりモータからのトルクを制限することによりスリップを抑制すると共にエンジン22を始動し(S350〜S370)、エンジン22の始動が完了したのを確認してスリップを生じている駆動輪にブレーキにより制動力を作用させることによってスリップを抑制するスリップ抑制制御に切り替える(S400)。これにより、バッテリ50の過大な電力による放電を伴うことなく運転者の要求する駆動力を出力することができる。
(もっと読む)
動力出力装置およびこれを搭載する自動車並びに駆動装置
【課題】 電動機からの動力を変速機を介して駆動軸に出力する装置やこうした装置を搭載する自動車において、電動機の駆動回路がシャットダウンされている最中に変速するときに生じ得る変速ショックを抑制する。
【解決手段】 シフトポジションSPがNレンジのときには変速機の変速段を変更するブレーキを作動する油圧のライン油圧PLを低圧Ploとしてブレーキを作動し(S310)、シフトポジションSPがNレンジ以外の通常時のときにはライン油圧PLを高圧Phiとしてブレーキを作動する(S320)。これにより、ブレーキに作用する係合力が通常時に比してゆっくり大きくなるから変速段の変更の際のモータ回転数の時間当たりの変化を小さくすることができ、モータ回転数の変化に伴って生じる変速ショックを抑制することができる。
(もっと読む)
ブレーキ制御装置
【課題】 制動後の再加速時にモータから所望の駆動力が得られるように、摩擦ブレーキによる制動力と、モータによる制動力又は駆動力を前後左右輪に独立に配分することが可能なブレーキ制御装置を提供する。
【解決手段】 ブレーキ制御装置は、車両の左右輪を独立に駆動及び回生するモータと、左右輪の各々に設けられる摩擦ブレーキと、車両の車両状態を取得する車両状態取得手段と、取得した車両状態に基づいて、モータの制動力又は駆動力と、摩擦ブレーキの制動力との配分を左右輪の各々に対して導出する配分導出手段と、を備えている。配分導出手段は、制動後の再加速時に、モータから所望の駆動力が得られるように配分を導出する。具体的には、左右輪のモータの温度のいずれもが所定温度以下となるように、又は、バッテリが過充電状態とならないように、上記配分を決定する。これにより、車両は、制動後の再加速する際、迅速かつ効率的に加速を行うことが可能となる。
(もっと読む)
動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御方法
【課題】 要求駆動力に対応しながら内燃機関を始動する。
【解決手段】 遊星歯車機構のサンギヤ,キャリア,リングギヤに第1モータ,エンジン,駆動軸が接続されると共に駆動軸に第2モータが接続されたハイブリッド自動車において、第2モータから出力可能な最大トルクTm2maxから予め設定されたクランキング時トルクTcrを遊星歯車機構のギヤ比ρで割ったものを減じて閾値Tthrを設定し(S130)、要求トルクTr*が閾値Tthr以上のときに(S140)、エンジンをクランキングして始動すると共にクランキング時のリングギヤ側の反力をキャンセルしながら要求トルクTr*が駆動軸に作用するよう制御する。クランキング時トルクTcrを考慮してエンジンを始動するから、エンジンのクランキング時に第2モータから出力するトルクに不足が生じることがない。この結果、要求駆動力に対応しながらエンジンを始動できる。
(もっと読む)
電気車制御装置
【課題】主電動機駆動インバータの1パルスモードにおいて、車輪・レール間の接線力対応トルク推定遅れのため、粘着力の有効利用が図れなくなることがある。
【解決手段】インバータ1パルスモード中の空転・滑走検知時に、接線力対応トルクの推定値から演算したトルク指令値の最小値を所定期間指令し終わった時点で、動輪がまだ再粘着途中あるいは再粘着に向かうことがなかった場合に、それまでのトルク指令値よりさらに小さいトルクを指令して再粘着させ、空転・滑走検知時点で演算したトルク指令予定値を少し小さな値に修正したトルクをその後指令し、この修正トルクを指令している期間中の平均加速度・減速度から、それ以降の車両速度を演算し、この推定車両速度と動輪速度との差速度がある閾値以上になったときに空転・滑走を検知するようにして、空転・滑走速度が大きくならないようにしつつ、確実に再粘着させることができるようにする。
(もっと読む)
電動補助型車両の制御装置およびそれを用いた電動補助型車両
【課題】 介護者等の意図しない減速を行わないようにすることで、電動車椅子の操作感を向上させる。
【解決手段】 操作力検知部71R,71Lにより検知される操作力が付与されていないと判定しかつ当該車両が加速状態であるときに、制御部12はモータ31R,31Lを発電制動の状態にして減速させる。
(もっと読む)
車両駆動ユニット及び車両駆動装置
【課題】エンジン・電動機複合型の車両駆動系において、電力ケーブルなどのワイヤハーネスの省略化、電力損失の改善を図る。
【解決手段】車輪の一部1がエンジン3により駆動される。エンジン3により駆動される車輪以外の車輪2を回転電機4により駆動する。発進時,登坂時のように走行負荷が大きいときに、回転電機4は、エンジン駆動系をアシストするために車輪駆動用の電動機として駆動される。車両運転には、低中負荷走行,減速時など電動アシスト駆動を必要としない運転領域がある。このアシスト不要時に回転電機を発電機として機能させて、車輪からの機械エネルギーを電気エネルギーに変換する。回転電機4、インバータ7、蓄電器11、コントローラ18は一体にユニット化され、ディファレンシャルギヤ5に取付けられる。
(もっと読む)
モータ駆動車両の走行擬似音発生装置
【課題】 モータ駆動車両の走行に関しての安全性を確保することができるモータ駆動車両の走行擬似音発生装置を提供する。
【解決手段】 音量設定マップMを参照(S5)して走行環境に適した走行擬似音の音量を選択し(S6,S7,S8)、自車両1の周囲に人物がいる場合には走行擬似音の音量を増加させる(S13〜S18)。
(もっと読む)
電動機を搭載した車両の制御装置
【課題】 電動機の上限回転数を電動機の温度に応じて設定することにより、電動機の稼働範囲を拡大して、車両の動力性能および燃費性能を向上することのできる電動機を搭載した車両の制御装置を提供する。
【解決手段】 発電機能を有する電動機が係合機構を介して車輪に連結され、車輪から入力されるトルクによって前記電動機を駆動して回生をおこなう電動機を搭載した車両の制御装置において、前記電動機の温度を判定する温度判定手段(ステップS1,S11〜S13)と、前記温度判定手段により判定される前記電動機の温度に基づいて前記電動機の上限回転数を設定する上限回転数設定手段(ステップS2)と、前記係合機構が係合されると前記電動機の回転数が前記上限回転数設定手段により設定される前記上限回転数以上となる場合に、前記係合機構を解放させる解放指示手段(ステップS4,S6)とを備えている。
(もっと読む)
燃料電池システムおよびそれを用いた輸送機器
【課題】 燃料電池から排出される液体を無駄なく有効に再利用できる、燃料電池システムおよびそれを用いた輸送機器を提供する。
【解決手段】 燃料電池システム10は、電気化学反応によって電気エネルギーを生成する燃料電池12、メタノール水溶液Sを収容する水溶液タンク18、燃料電池12から排出される水分を含む排気が導入される水タンク44、水タンク44内の水量を検出する水位レベルセンサ54、水タンク44内の水を水溶液タンク18に還流させる水ポンプ60、および燃料電池システム10の各構成要素の動作を制御するCPUを含む。燃料電池システム10では、発電開始前に水位レベルセンサ54によって水タンク44内の水量を検出し、所定量以上である場合、水ポンプ60を駆動させ水溶液タンク18に水タンク44内の水を還流させる。
(もっと読む)
電動車両駆動制御装置及び電動車両駆動制御方法
【課題】駆動モータを駆動して、車両要求トルクに対して出力トルクが過不足する分を確実に補い、車両駆動装置に振動が発生するのを抑制する。
【解決手段】発電機目標トルクTG* を算出する発電機目標トルク算出処理手段と、発電機のイナーシャトルクTGIに基づいて、イナーシャ補正トルクを算出するイナーシャ補正トルク算出処理手段と、算出されたイナーシャ補正トルクに基づいて駆動モータ目標トルクを発生させる駆動モータ目標トルク発生処理手段と、イナーシャ補正トルクによる出力トルクの変動を表す出力トルク変動指標に基づいて出力トルクを補正するダンピングトルク補正処理手段とを有する。イナーシャ補正トルクが算出され、出力トルクが補正されるので、車両要求トルクTO* に対して出力トルクが過不足する分を確実に補うことができる。
(もっと読む)
車載エネルギー蓄積器を備える電気牽引車両の特別低電圧電気エネルギー供給システム
本発明は、軌道(20)を走行する少なくとも1つの電気牽引車両(30)に対して特別低電圧電気エネルギーを供給するシステムであって、軌道(20)に直接隣接するように導入された特別低電圧供給手段(10)と、互いに平行であり、隣接するか若しくは離間された2つの電源レール(41,42)または類似した電源要素であって、そのうちの第1の電源レール(41)が電源手段(10)の端子(11)に連結され、第2の電源レール(42)が電源手段(10)の別の端子(12)に連結された2つの電源レール(41,42)または類似した電源要素と、車両内で電気エネルギーを蓄積する少なくとも1つの車載手段(60)と、電気エネルギー収集手段(51,52)に連結され、一方で蓄積手段(60)に接続され、他方で牽引チェーン(70)に接続された少なくとも1つの車載電源手段(80)とを備え、特別低電圧電源手段(10)が車載電源手段(80)に給電し、次に、蓄積手段(60)が連続的走行段階においてその総容量まで電気エネルギーを蓄積するように、車載電源手段が蓄積手段(60)に給電する。 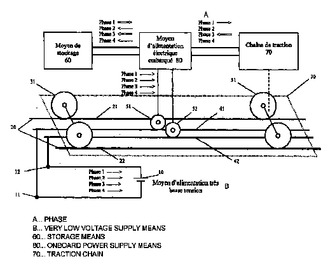 (もっと読む)
(もっと読む)
進歩セルモデル予測技術を用いたバッテリパックの電力容量の計算方法
【課題】ハイブリッド電気車両(HEV)及び電気車両(EV)に用いられるバッテリパックを含むバッテリアプリケーションの充放電電力を推定する方法及び装置を提供すること。
【解決手段】一つの充放電電力の予測方法は、電圧、充電状態(SOC)、電力及び電流設計制限事項を含み、ユーザー定義された予測時間範囲△tに対して動作する。少なくとも2通りのセルモデルが電圧限度に基づく最大の充放電電力を計算するのに用いられる。一つは、付随する数式を線形化するためにテイラー級数展開を用いる簡易なセルモデルである。もう一つは、離散−時間状態−空間の形においてセルダイナミックスをモデリングするより複雑ではあるが、正確なモデルである。セルモデルは、温度、抵抗、キャパシタなどの入力を含むことが可能になる。モデル基盤の接近法を用いる一つの長所は、同じモデルが電圧限度に基づいて最大の充放電電流の推定及びSOCを生成するカルマンフィルタリングに使用可能であるという点である。  (もっと読む)
(もっと読む)
電動機の制御装置
【課題】本発明は同期電動機をセンサレスで駆動するための制御装置に関し、空転状態にある電動機を円滑に駆動し始めることを目的とする。
【解決手段】インバータ60を用いて電動機24を駆動する。モータコントロール回路86に、インバータ60を介さずに電動機24の各相コイルに生ずる逆起電圧を取得させ、その逆起電圧に基づいて電動機24のロータ位置を取得させる。更に、モータコントロール回路86は、インバータ60が備える複数のスイッチング素子に供給するゲート信号を、検知したロータ位置に応じて、ロータが回転するように制御する。電動機24の電力駆動が要求された後、モータコントロール回路86がロータ位置を取得するまでの間は、ゲート信号をOFF電位に固定して全てのスイッチング素子をオフ状態とする。
(もっと読む)
661 - 675 / 675
[ Back to top ]