
Fターム[5H180FF07]の内容
交通制御システム (133,182) | 個別車両の運行・走行の管理 (59,670) | 車両位置の検出・表示を行うもの (15,249) | 位置誤差の補正、他の位置情報の参照 (1,384)
Fターム[5H180FF07]に分類される特許
301 - 320 / 1,384
行動履歴管理システム
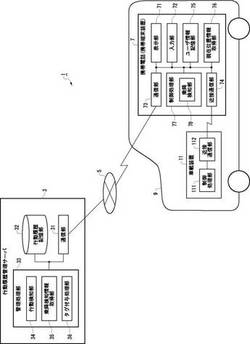
【課題】ユーザがドライブ中に携帯端末装置を利用した行動に適切なタグを付加する。ユーザがドライブの途中下車中に携帯端末装置を利用した行動にも適切なタグを付加する。
【解決手段】行動履歴管理システム1は、携帯端末装置を利用した行動を検知する行動検知部34と、携帯端末装置を携帯するユーザによる車両への乗降を検知する乗降検知部78と、検知された乗降の情報に基づき、行動検知部34により検知された行動がドライブ中に行われたと判断される場合に、ドライブ中を表すドライブタグを行動に付与するタグ付与処理部36と、ドライブタグが付与された行動を記憶する行動履歴記憶部32とを有する。タグ付与処理部36は、検知される乗降の情報に基づき、降車とその後の乗車の間に行動が検知された場合に、ドライブタグを行動に付与する。
(もっと読む)
車両検知エリア生成のためのプログラム

【課題】車両が停留所に停車又は停留所を通過しているかどうかを正確に検知するための適切な車両検知エリアを生成する。
【解決手段】
車両検知エリア生成装置において、車両に搭載されたGPS装置から出力されるGPS位置データを定期的に受信し、それをGPS位置データ格納手段に時刻とともに格納する手段と、GPS位置データ格納手段に格納されたGPS位置データと所定の車両停止データ特定用エリアとを用いることにより、車両が停留所に停車していたときに取得されたGPS位置データであるとみなせる車両停止位置データを抽出する手段と、抽出された複数の車両停止位置データに基づき車両検知エリアを生成する手段とを備える。
(もっと読む)
道路形状推定装置、道路形状推定方法及びプログラム
【課題】道路形状を正確に推定することができるようにする。
【解決手段】形状補間点の補間点データを取得するデータ取得処理手段と、補間点データに基づいて各形状補間点における曲率半径を算出する半径算出処理手段と、前記各曲率半径に基づいてコーナを検出し、開始候補点及び終了候補点を設定するコーナ検出処理手段と、前記コーナの開始候補点及び終了候補点に基づいて中心仮想点を、該中心仮想点より開始候補点側に前方仮想点を、前記中心仮想点より終了候補点側に後方仮想点を設定し、コーナの仮想曲率半径を最小半径として算出する最小半径算出処理手段とを有する。中心仮想点、前方仮想点及び後方仮想点に基づいて仮想曲率半径が算出されるので、道路形状を正確に推定することができる。
(もっと読む)
道路形状推定装置、道路形状推定方法及びプログラム
【課題】道路形状を正確に推定することができるようにする。
【解決手段】道路に沿って設定され、道路の形状を表す複数の形状補間点の補間点データを取得するデータ取得処理手段と、前記道路における所定の区間内の前記補間点データに基づいて各形状補間点における曲率半径を算出する半径算出処理手段と、前記各曲率半径に基づいて前記区間内のコーナを検出するコーナ検出処理手段と、検出されたコーナ内において閾値以上の曲率半径を有する形状補間点でコーナの分割を行うコーナ分割処理手段とを有する。前記閾値は、前記検出されたコーナ内の各形状補間点における曲率半径の平均値に対応させて設定される。閾値以上の曲率半径を有する形状補間点でコーナの分割が行われるので、道路形状を正確に推定することができる。
(もっと読む)
測位装置、通信システム及び測位方法
【課題】測位時点での電波環境の影響による伝播誤りと伝播遅延の検知誤りの両方を考慮した上で、測位誤差を適正に補正し、測位結果の信頼性を向上させる。
【解決手段】測位サーバ10は、移動局が位置するエリアを推定する測位部14と、複数のエリアの各々について伝播誤り補正にて正解とされるエリアおよび当該正解とされる確率を記憶した伝播誤り補正情報記憶部19と、同一のセクタに属する複数のエリアにおいて伝播遅延誤り補正にて正解とされるエリアおよび当該正解とされる確率を記憶したPD誤り補正情報記憶部16と、上記の記憶部19、16から読み出した、複数回の測位結果より対応付けられる正解とされるエリアおよび当該正解とされる確率に基づき測位結果を補正する補正部12と、測位結果を出力する測位結果出力部13とを備える。
(もっと読む)
ドライブレコーダ
【課題】車両が走行する走行道路とこの走行道路に交差する交差道路へ進入する車両の進行方向に応じて車載撮影手段の撮影方向を設定し、車載撮影手段の限られた画角内で必要な情報がより多く取得されるドライブレコーダを提供する。
【解決手段】自車101に搭載されている車載カメラ16は、走行道路R11と交差道路R12とが交差する道路交差部C11において、自車101の位置に応じて旋回駆動される。走行道路R11と交差道路R12とが鋭角に交差する道路交差部C11において、自車101が走行道路R11から交差道路R12へ右折しながら進入する場合、車載カメラ16は進行方向左側へ旋回される。これにより、車載カメラ16は、交差道路R12を走行しつつ自車101に接近する他車102を重点的に撮影することができる。
(もっと読む)
目的地設定装置及び目的地設定用プログラム
【課題】複数の検索キーワードが入力された場合の処理を効率的に行う。
【解決手段】入力された2つのキーワードの関係が、直接継続して使用される場合だけであり、両キーワード間に他のキーワードが入る場合が存在しないという、一義的関係にある場合、両キーワードを連結して1つのキーワードとする。例えば、「とうきょう」に対する「れいんぼー」、「れいんぼー」に対する「らんど」が共に一義的関係にあれば、入力された各キーワードを連結し「とうきょうれいんぼーらんど」という検索キーワードにて目的地の候補を検索する。
(もっと読む)
ナビゲーション装置、ナビゲーション方法、およびナビゲーションプログラム
【課題】ユーザがフロントガラス越しに確認することが難しい遠方の交差点名称看板等の標識の存在位置と共に表示内容も認識することが可能なナビゲーション装置、ナビゲーション方法、およびナビゲーションプログラムを提供すること。
【解決手段】ドライバー視点による3次元画像に案内オブジェクトを重畳表示し経路案内をするナビゲーション装置であって、標識の位置情報及び標識の表示内容を示す標識データを用いて、3次元画像上の標識位置に3D標識を表示する第1の標識表示部と、標識の表示内容をユーザが識別できる位置および大きさで2D標識を表示する第2の標識表示部と、第1の標識表示部によって表示した3D標識と前記第2の標識表示部によって表示した2D標識を紐付け表示する紐付け表示部とを備える。
(もっと読む)
加速度センサを用いて歩行者の歩行タイミングを決定する携帯端末、プログラム及び方法
【課題】歩行者が、携帯端末を手持ちで歩行している場合であっても、その携帯端末に搭載された加速度センサを用いて、正確な歩行タイミングを検出することによって、歩行者の進行方向をできる限り正確に決定する携帯端末等を提供することを目的とする。
【解決手段】携帯端末に含まれる歩行タイミング決定手段は、3軸の加速度データ(ax,ay,az)から、腕振り平面を作る2軸の加速度データ(ax',ay')に射影する射影手段と、2軸の加速度データ(ax',ay')から加速度ベクトル方向θを算出する加速度方向算出手段と、時刻的に隣り合う2つの加速度ベクトル方向の差分を算出する加速度方向差分算出手段と、加速度方向差分の極大点及び極小点となる時点を、腕部最上点として検出する腕部最上点検出手段と、時刻的に隣り合う2つの腕部最上点の中間の時点を、腕部最下点として検出する腕部最下点検出手段とを有する。
(もっと読む)
データ検証装置及びデータ検証プログラム
【課題】車載機から取得した情報の正当性の検証を行うことができるデータ検証装置及びデータ検証プログラムを提供することを目的とする。
【解決手段】車載機12が取得した、路側機13から送出される路側機13及び送出時間を特定可能な第一の情報と、車載機12が搭載された車両11の位置を特定可能な第二の情報とを両方含んだ第三の情報を第一のネットワーク17経由で取得する第一の取得手段と、路側機13から送出される第一の情報を第二のネットワーク18経由で取得する第二の取得手段と、第一の取得手段が取得した第三の情報に含まれる第一の情報と第二の取得手段が取得した第一の情報とを照合し、整合が取れているときに第一の取得手段が取得した第三の情報に含まれる第二の情報を正当な情報と判定する判定手段とを有するデータ検証装置15であることにより上記課題を解決する。
(もっと読む)
GPSレシーバ
【課題】初回測位の精度が低い場合であってもその後の測定位置の精度低下を有効に避けることができるGPSレシーバを提供する。
【解決手段】GPS測位の結果に基づいてGPSレシーバが現在位置し得る第一の範囲を推定する現在位置推定手段と、第一の範囲に基づいて、過去のある時点でGPSレシーバが位置し得た第二の範囲を推定する過去位置推定手段と、過去のある時点のGPS測位で計算された過去測定位置が第二の範囲に含まれるか否かを判定する過去測定位置判定手段とを備え、過去測定位置が第二の範囲に含まれない場合には、推定位置の計算に該過去測定位置を使用しないようにGPSレシーバを構成する。
(もっと読む)
道路形状推定装置、道路形状推定方法及びプログラム
【課題】道路形状を正確に推定することができるようにする。
【解決手段】補間点データを取得するデータ取得処理手段と、補間点データに基づいて各形状補間点における曲率半径を算出する半径算出処理手段と、前記各曲率半径に基づいて前記区間内のコーナを検出するとともに、検出されたコーナの開始候補点及び終了候補点を設定するコーナ検出処理手段と、検出されたコーナの開始候補点及び終了候補点に基づいて、所定の結合条件が成立するかどうかを判断し、該所定の結合条件が成立する場合に、前記複数のコーナのうちの所定のコーナと、該所定のコーナに隣接するコーナとを結合するコーナ結合処理手段とを有する。開始候補点及び終了候補点に基づいて、所定の結合条件が成立するかどうかが判断されるので、道路形状を正確に推定することができる。
(もっと読む)
ナビゲーション装置、ナビゲーション方法およびナビゲーションプログラム
【課題】現在地周辺の状況を表示しつつ、現在地から離れた遠方の案内情報を分かり易い形態でユーザに提示することが可能なナビゲーション装置を提供すること。
【解決手段】移動体の前方を撮像した実写画像に案内オブジェクトを重畳表示して案内を行うナビゲーション装置であって、誘導経路上の現在地から目的地方向に所定の距離移動した地点を生成地点とした案内オブジェクトを生成する経路案内オブジェクト生成部と、案内オブジェクトの表示位置を前記生成地点から移動した現在地とし、前記実写画像に重畳して表示部に表示させる表示制御部とを有する。
(もっと読む)
衛星信号受信装置および衛星信号受信装置の制御方法
【課題】利用者が手動操作で受信を行う際に、測位処理の終了までやタイムアウトまでの時間を把握でき、利便性を向上できて使い勝手の良い衛星信号受信装置を提供すること。
【解決手段】GPS付き腕時計は、GPS衛星から送信される衛星信号を受信する受信回路と、ディスプレイと、制御部20とを備える。衛星信号は、複数のサブフレームを備える。制御部20は、受信部の動作を制御する受信制御手段51と、複数のGPS衛星から受信した衛星信号によって測位処理を行う測位処理手段53と、受信した衛星信号に含まれるサブフレームの種類を判定し、最初に受信したサブフレームの種類の判定結果によって測位処理が終了するまでの測位残時間を算出する測位残時間算出手段54と、前記測位残時間を前記ディスプレイに表示する表示制御手段55とを備える。
(もっと読む)
測位方法、プログラム及び測位装置
【課題】慣性航法用センサの検出結果に含まれる誤差を補正するための新たな手法を提案
し、より正確な現在位置の測位を実現すること。
【解決手段】カーナビゲーション装置1において、カーナビ用ジャイロセンサ61の検出
結果を積分することで、地球に対する慣性航法用センサ60の絶対姿勢の推定値である推
定絶対姿勢が算出される。そして、移動体座標系と基準座標系との座標変換行列が推定絶
対姿勢に基づいて算出され、当該座標変換行列を用いて、カーナビ用加速度センサ63の
検出結果が基準座標系に変換されるとともに、重力加速度の成分が減算されることで、基
準座標系における自動車の移動ベクトルが算出される。そして、この移動ベクトルを用い
て現在位置が測位される。
(もっと読む)
ナビゲーション装置
【目的】従来、GPS受信機による位置検出が不可能な場合に、その旨をユーザに明確に報知する手段がなかったので、正確な現在位置情報を利用したい場合にも、その手掛かりとなる情報を得ることができなかった。本発明は、表示した現在位置情報の信頼性を知る手掛かりとなる表示手段を備えたナビゲーション装置を提供する。
【構成】GPS受信手段を備えたナビゲーション装置において、GPS受信手段による位置検出処理ができない非測位状態のとき、その継続時間に応じて異なる表示を行う。また、非測位状態の継続時間も合わせて表示する。
(もっと読む)
車載車両管理装置
【課題】車輌の実車位置をより正確にかつより迅速に測位して、車輌のステータス管理を効率よく行うことができる簡単な構造でより安価な車載車両管理装置を提供する。
【解決手段】キロポストデータベース16に、路線に設定されている所定数のキロポストの番号、このキロポストの位置、および各キロポスト毎に、当該キロポストの位置が含まれるようにそれぞれ設定されたキロポスト領域の各情報が格納されている。電子制御装置11は、GPS受信機13からのGPS測位位置信号が各キロポストに最初に位置することが特定されたとき、このGPS測位位置を基準としてそれ以後の前記車輌の実車位置を、車速と車輌の走行時間とに基づいて特定して、ステータス情報を作成する。
(もっと読む)
位置特定装置、コンピュータプログラム及び位置特定方法
【課題】歩行者が地下街又は建物の中などの屋内にいる場合であっても、歩行者の位置を特定することができる位置特定装置、コンピュータプログラム及び位置特定方法を提供する。
【解決手段】歩行挙動判定部173は、測位部13の距離センサ132、方位センサ133、高度センサ134などで得られたデータに基づいて、歩行者の歩行挙動を判定する。位置推定部171は、歩行者の地図上の推定位置を算出し、誤差算出部172は、位置推定部171で推定した推定位置の誤差範囲を算出する。位置特定部175は、推定位置の誤差範囲内に、歩行挙動判定部173で判定した歩行挙動に関連する特徴地点があるか否かを判定し、特徴地点がある場合、その特徴地点を歩行者の位置として特定する。
(もっと読む)
加速度センサ及び地磁気センサを用いて歩行者の進行方向を決定する携帯端末、プログラム及び方法
【課題】歩行者が、携帯端末を手持ちで歩行している場合であっても、その携帯端末に搭載された地磁気センサのみを用いて、歩行者の進行方向をできる限り正確に決定する携帯端末、プログラム及び方法を提供する。
【解決手段】携帯端末の進行方向決定手段は、複数の加速度ベクトルから重力方向の重力ベクトルを導出し、且つ、該重力ベクトルに対応する地磁気ベクトルを選択する基準ベクトル導出手段と、記重力ベクトルと地磁気ベクトルからなる方位基準面の法線ベクトルを導出する方位基準面導出手段と、複数の加速度ベクトルから加速度面の法線ベクトルを近似的に算出する加速度面算出手段と、方位基準面と加速度面の両平面の法線ベクトルのなす角を方向角として算出する方向角算出手段とを有する。
(もっと読む)
測位装置および推定装置
【課題】処理量を低減しながら、車両位置の補正精度を高くしたい。
【解決手段】ナビゲーションシステムは、車両に搭載されている。第1位置取得部40は、車両の内部において、車両位置を測位する。第2位置取得部44は、車両の外部での特定の位置に設置された撮像装置が撮像した画像から導出された車両位置を取得する。補正部48は、第2位置取得部44において取得した車両位置によって、第1位置取得部40において測位した車両位置を補正する。
(もっと読む)
301 - 320 / 1,384
[ Back to top ]