
Fターム[5H180LL02]の内容
Fターム[5H180LL02]に分類される特許
701 - 720 / 1,853
車両周辺監視装置、車両、車両周辺監視用プログラム
【課題】カメラの撮像画像による車両周囲の対象物の監視が不十分となることを防止して、撮像素子のキャリブレーションを実行する車両周囲監視装置を提供する。
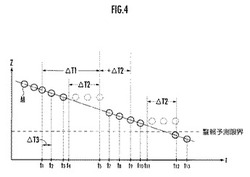
【解決手段】時刻t1で対象物Mの実空間位置Zの算出を開始し、所定時間ΔT1が経過するまでの間に、キャリブレーションの実行タイミングと重なってΔT2の間にキャリブレーションが実行されたときには、キャリブレーションにより車両周囲の画像が入力できなかったΔT2の分だけ画像を取得する期間を延長して、時刻t7,t8,t9で画像を取得して対象物Mの実空間位置Zを算出し、ΔT1+ΔT2の期間における時刻t1,t2,t3,t7,t8,t9で取得した車両周囲の6個の画像から検出した対象物の実空間位置Mの変化により、対象物と車両間の相対速度を算出する相対速度算出手段を備える。
(もっと読む)
車両用移動可能範囲検出装置

【課題】 駐車スペースに駐車するための自車の移動可能範囲の有無を的確に判断することが可能な車両用移動可能範囲検出装置を提供する。
【解決手段】 レーダー装置11で所定の時間間隔で自車周辺の水平方向の所定角度範囲を走査するように電磁波を送信し、所定の処理領域内に存在する電磁波の反射点との車幅方向における距離の総和が最小となる直線を車幅方向境界線として算出するとともに、自車の車長方向における距離の総和が最小となる直線を車長方向境界線として算出し、左右の車幅方向境界線の車幅方向における距離のうちで最小距離を、自車が駐車のために移動可能な移動可能範囲として算出するので、その移動可能範囲を精度良く算出することが可能となり、移動可能範囲が不足しているのに駐車スペースSpに駐車可能であると誤判定されるのを防止することができる。
(もっと読む)
車両の運転支援装置
【課題】車両旋回走行時における内輪差を運転者に意識させる表示を行うことにより、内輪差に起因する車体の接触を防止することができる運転支援装置を提供する。
【解決手段】車両の旋回中心点から水平方向で最も離れた車両の所定部位P1と旋回中心OTCとの水平方向の距離r1と、車両の旋回方向内側後輪と旋回中心OTCとの水平方向の距離r3の平均距離rAVを操舵角θSTに応じて算出し、旋回中心OTCから水平方向に平均距離rAVだけ離れた仮想車両中心の軌跡LAVを予測する。車両の客室内の、運転者の前方の内装部材に、予測した仮想車両中心軌跡LAVを示すガイド線LGを表示する。
(もっと読む)
運転支援装置及び運転支援システム
【課題】周囲の他車両の車両認識状態を推定し、推定した車両認識状態に基づいて運転支援を適切に行える運転支援装置及び運転支援システムを提供する。
【解決手段】自車両5の周囲に存在する他車両の情報に基づいて自車両5の運転を支援する運転支援装置であって、他車両からみて自車両5が存在しないと仮定して他車両の第1走行軌跡を予測し(S10)、自車両5が存在すると仮定して他車両の第2走行軌跡を予測し(S12)、第1走行軌跡、第2走行軌跡と実際の走行軌跡とを比較し(S16)、比較結果に基づいて他車両が自車両5の存在を認識しているか否かを推定することで(S24)、他車両が手動運転や通信を行えない車両等である場合であっても、他車両が自車両5を認識しているか否かを推定し、自車両5の運転支援を適切に行うことが可能となる。
(もっと読む)
注意喚起装置
【課題】 運転者にとって対処することが困難な範囲を路面に実際に描画することによって、その範囲をリアルタイムで実際に表示する技術を提供する。
【解決手段】 運転者の死角範囲と運転者が避けきれない範囲と運転者の視野外範囲等は運転者が対処することが困難な範囲である。そこで、運転者が対処することが困難な路面上の範囲を特定する特定手段と、その特定手段で特定された範囲の路面を車両から照射してその範囲を実際に描画する車載式描画手段を車載する。すると、車両の運転者にとって対処することが困難な範囲を路面に実際に描画して表示することができ、周囲に居る歩行者等の注意喚起対象に対して、対処することが困難な範囲に居ることを直接的に知らせることができる。あるいは注意喚起対象に対して対処することが困難な範囲に侵入しようとしていることを直接的に知らせることができる。
(もっと読む)
車両用駐車スペース検出装置
【課題】 駐車可能な駐車スペースの有無を、その手前位置から的確に判断することが可能な車両用スペース検出装置を提供する。
【解決手段】 レーダー装置11で所定の時間間隔で自車周辺の水平方向の所定角度範囲を走査するように電磁波を送信し、その電磁波が物体に反射された反射波が受信されると、反射波の受信結果に基づいて電磁波が物体上で反射する反射点を検出し、予め記憶された自車の車体寸法データおよび反射点の配列に基づいて駐車スペースSpの有無を判定する。このとき、所定の処理領域内に存在する反射点のうち、水平方向において隣り合う角度の電磁波による反射点組の車長方向における距離が所定値以上となる場合に、つまり物体が自車の車長方向に距離を置いて不連続に配置されている場合に駐車スペースが有ると判定するので、自車が駐車しようとしている場所の手前位置から駐車スペースの有無を的確に判定することができる。
(もっと読む)
撮影装置及びプログラム
【課題】 事故当事者のプライバシー侵害対策を講じる。
【解決手段】 衝突の発生またはそのおそれが高いことを検出する衝突検出手段(13)、衝突の発生またはそのおそれが高いことが検出されたときにその時点前後の映像をカメラで撮影して保存する第1の映像保存手段(17)、衝突の発生またはそのおそれが高いことが検出されたときに無線により撮影依頼信号を送信する第1の送信手段(15)、撮影依頼信号を受信する第1の受信手段(15)、撮影依頼信号を受信したときその時点前後の映像をカメラで撮影し暗号化して保存する第2の映像保存手段(17)、暗号化された映像を無線により送信する第2の送信手段(15)、暗号化された映像を受信する第2の受信手段(15)、暗号化された映像を受信したときその暗号化された映像を保存する第3の映像保存手段(17)を備える。
(もっと読む)
車両の運転支援装置
【課題】 車両旋回走行時における内輪差を運転者に意識させる表示を行うことにより、内輪差に起因する車体の接触を防止することができる運転支援装置を提供する。
【解決手段】 車両旋回走行時に、車両の旋回中心点から水平方向で最も離れた車両の所定部位P1の軌跡と、車両の旋回方向内側後輪の軌跡との水平方向の距離である仮想車幅WAを操舵角θSTに応じて算出するとともに、所定部位P1と旋回中心OTCとを結ぶ線分と、後輪車軸と平行な直線とのなす角を旋回角度θTRNとして算出する。旋回角度θTRNと仮想車幅WAを用いて、所定部位P1から(WA/2)の距離にある中点P3を求め、ヘッドアップディスプレイにより運転者の前方に表示する。
(もっと読む)
緊急退避システム、緊急退避方法
【課題】運転者の意識レベルが低下した場合に車両を路肩に退避させる緊急退避システムにおいて、路肩までのレーンチェンジの回数を低減する緊急退避システム等を提供すること。
【解決手段】運転者状態検出センサ26と、車線区分線認識手段23、24と、意識レベルが所定値以下に低下したことを検知する意識レベル低下検知手段41と、車線区分線を自車両が横断しているか否かを判定するレーンチェンジ判定部42と、車線区分線を車両が横断していると判定された場合、横断先の走行レーンが退避先に対し自車レーンより遠方になるか否かを判定するレーンチェンジ方向判定手段43と、横断先の走行レーンが退避先に対し自車レーンより遠方になる場合、自車両の後方に他車両が検出されるか否かを判定する後方車両検出手段44と、後方車両が検出されない場合、車線区分線を横断する前の元の走行レーンに自車両を復帰させる自車レーン復帰手段46と、を有する。
(もっと読む)
車両用警報装置
【課題】 ドライバに対して複数の警報を発することが可能な車両用警報装置に関し、同時に複数の警報が出力されるような状況において、警報の優先順位を適切に設定してドライバの混乱を未然に防止する。
【解決手段】複数の警報を報知可能な警報手段2,4と、車両前方の先行車又は障害物を捕捉し、対象物との距離又は衝突予測時間に基づいて警報手段2,4から警報を発したり、車両1の作動状態を制御する衝突防止装置30と、ドライバの状態又は車両の状態に基づいて警報手段2,4から警報を発生する装置20,11と、警報手段2,4に対して警報の優先順位を設定する優先度設定手段8とをそなえ、優先度設定手段8は、衝突防止装置30で捕捉された対象物に対して、衝突防止装置の警報や作動を実行するべき対象物として信頼できる度合いを求め、当該度合いに基づいて優先順位を設定するように構成する。
(もっと読む)
路車間通信システム
【課題】有料道路等の一方通行路を逆走する可能性が極めて高い車両がある場合に、当該逆走車両及び本線を走行中の車両に対して、警告又は注意を行う路車間通信システムを提供する。
【解決手段】通信可能範囲を通過する車両に対して、当該車両が有料道路に進入したことを示す入口ゲート通過情報を付与する第1路側無線装置を、有料道路の流入ランプに設ける。通信可能範囲を通過する車両から第1路側無線装置によって付与された入口ゲート通過情報を取得する第2路側無線装置を、有料道路の流出ランプに設ける。
そして、管理装置としての機能を有する第2路側無線装置は、通過車両から入口ゲート通過情報が取得されたか否かを判定し、この入口ゲート通過情報が取得されない場合には、当該車両に逆走していることを警告する逆走警告情報を提供する。
(もっと読む)
運転支援装置
【課題】車両の交差点進入時の信号機の状態を高精度に予測する運転支援装置を提供することを課題とする。
【解決手段】車両の交差点進入時の信号機の状態を予測する運転支援装置であって、車両の交差点手前での車速の変化を予測する車速変化予測手段と、車速変化予測手段で予測した車速の変化に基づいて交差点進入時の信号機の状態を予測する信号機状態予測手段とを備え、車速変化予測手段は、車両の位置が交差点手前に設定される所定領域の手前に存在する場合と存在しない場合とで車速変化の予測方法を変えることを特徴とする。
(もっと読む)
他車検出装置
【課題】簡易な処理によって確実に死角中に位置する他車を検出する「他車検出装置」を提供する。
【解決手段】自車300が現在走行中の車線の右側に隣接する車線が存在する場合において、自車300後方の当該右側に隣接する車線上に他車302が存在し、当該他車302によって当該右側に隣接する車線の右側の境界となるレーンマーク301がカメラ1に対して完全に隠蔽されている場合(b1)には、カメラ1で撮影される自車300後方の画像には、当該右側に隣接する車線の右側の境界となるレーンマーク301が一切写り込まない(b2)。そこで、死角内他車検出部2は、このように当該右側の隣接する車線の右側の境界となるレーンマーク301を認識できない場合、右側のブラインドスポット内の他車の検出を警報制御部3に通知する。
(もっと読む)
警告装置、警告方法および警告プログラム
【課題】画像から検出した移動体および自車両の運転状況に応じて、適切なタイミングで運転手に注意喚起すること。
【解決手段】警告装置100は、車両に搭載したカメラにより撮影された画像に基づいて、移動体検出部120が移動体を検出した場合に、出力部150が一様に警告音を出力するのではなく、警告判定部140が自車両の運転状況情報(アクセルフラグ、ブレーキフラグ、車速フラグ)に応じて警告音の種類(第1の警告音あるいは第2の警告音)を判定し、判定結果に応じて出力部150が警告音を出力する。
(もっと読む)
対象領域決定方法及び対象領域決定装置
【目的】車下陰やエッジのような特徴を用いなくても画像から対象の関心領域を決定することが可能な「対象領域決定方法及び対象領域決定装置」を提供することである。
【構成】本発明は、画像から対象物(車両)の有無や対象物の識別をするための関心領域を決定する方法及び装置であり、(1)撮像画像における角点(輝度変化の大きな点)を検出するステップと、(2)検出された角点に基づき、撮像画像から対象物体のエッジを取得するステップと、(3)取得されたエッジ上の角点に基づき、関心領域に含まれる角点を寄せ集めるステップと、(4)撮像画像における寄せ集められた角点で形成された画像領域を、対象物体を含む可能性がある関心領域として決定するステップとを含む。
(もっと読む)
運転支援装置
【課題】走行指標のない狭い道路を走行する場合であっても、ユーザが見易いように走行指標を提示して運転の負荷を軽減することで、ユーザの運転を支援する運転支援装置を提供する。
【解決手段】車両で道路を走行するユーザの運転支援を行う運転支援装置であって、車両の前方を撮像する撮像部と、撮像部が撮像した撮像画像から走行中の道路上のセンターラインの有無を判定するセンターライン有無判定部と、センターライン有無判定部が走行中の道路上にセンターラインが無いと判定した場合に、走行中の道路の道路端の位置に基づいて、走行中の道路上にあるべき走行指標の位置を推定する走行指標位置推定部と、走行指標位置推定部が推定した走行中の道路上の位置に、光を投射することによって走行指標を描写する走行指標描写部とを備える。
(もっと読む)
車載用画像処理装置及び車載用画像表示装置
【課題】画像中の重要な物体を縮小画像中で強調し、かつ、ひずみの少ない縮小画像を得ることができる車載用画像処理装置及びその画像を表示する車載用画像表示装置を提供する。
【解決手段】自車両側後方の画像を側後方カメラから取得し(S100)、位置検出用カメラから画像を取得し(S105)、取得した位置検出用カメラ画像から他車両又は人までの距離の算出、水平線の検出、隣接車線内の位置の算出を行う(S110)。S110で検出した他車両又は人あるいは水平線上部の物体、隣接車線内の領域のエネルギを設定した画像エネルギ画像を生成する(S115)。その後、画像中の画像エネルギが所定の値以下の部分を結ぶSeamを算出し、Seamを削除して縮小画像を生成する(S120)。そして、算出した縮小画像を表示装置に表示する(S125)。
(もっと読む)
車線維持支援装置
【課題】左右の車線区分線の一方しか認識できない場合、認識できない側の逸脱を適切に判定し不要警報の出力や不警報を防止する車線維持支援装置を提供すること。
【解決手段】自車両21の左右少なくとも一方の車線区分線の逸脱傾向を検出して乗員に警告する車線維持支援装置100において、車線区分線を認識する車線区分線認識手段12と、車両の操舵を検出する車両操作検出手段42と、を有し、左右の車線区分線のうち検出できない側へ、車両操作検出手段42により車両の操舵が検出された場合、左右の車線区分線のうち検出できない側のみ逸脱傾向の検出を緩和する、ことを特徴とする。
(もっと読む)
車線逸脱警報装置
【課題】
ビデオカメラでの白線検出による簡易で正確な車線逸脱警報装置の提案。
【解決手段】
車両側辺に設置したビデオカメラの撮影画像から、車両側辺接地部と道路上に引かれた白線との道路横断方向距離を計測し、その計測結果の距離が一定値以下である場合には車両が白線に接近しすぎて走行しており車線逸脱の恐れがあるとして、また前記計測結果の距離が一定範囲内であって尚且つ車両走行方向の白線に対する傾きが白線に接近する方向に一定値以上である場合もまた、このまま走行を続けると車線逸脱の恐れがあるとして、各々警報を発する。
(もっと読む)
カーナビゲーションシステム
【課題】危険な運転状態であったとき、その位置を危険箇所として登録し、運転技量の向上により危険個所でなくなった場合には、その個所を危険個所から消去することができるカーナビゲーションシステムを提供する。
【解決手段】ステアリングセンサ10やブレーキセンサ11の検出信号から危険な運転状態と判定された場合、その位置をメモリ部8に危険箇所として登録する。このとき、併せて現在位置の天気を送受信部9により情報センタから取得し、現在時刻を時計部22から取得して危険箇所と共に登録する。危険箇所として登録された位置であっても、運転技量の向上により、運転状態、その時の天気、時刻などを総合的に判断して危険運転でないと判定されたときには、メモリ部8に登録されている危険箇所から消去する。
(もっと読む)
701 - 720 / 1,853
[ Back to top ]