
Fターム[5H180LL17]の内容
交通制御システム (133,182) | 衝突防止 (18,251) | 特定の場所における衝突防止 (1,961) | 車庫、駐車場、ガソリンスタンド等の近傍 (344)
Fターム[5H180LL17]に分類される特許
341 - 344 / 344
車両追突防護装置
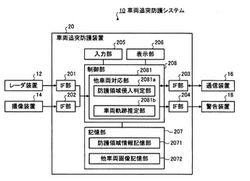
【課題】駐車場に駐車している駐車車両に対する追突および当て逃げから防護することができること。
【解決手段】駐車中の駐車車両1を他車両2の追突から防護する車両追突防護装置20であって、レーダ装置12および撮像装置14は、駐車車両1の駐車領域を含む防護領域の監視をし、他車両対応部2081は、レーダ装置12および撮像装置14による監視結果、例えば、他車両が防護領域に侵入した、駐車車両1に追突すると推定される、または駐車車両1に追突したなどの監視結果に応じて警告、車両制御支援、防護領域情報提供または画像撮影などの対応をする。
(もっと読む)
カメラの画像を図形的に処理するための方法および警告装置
【課題】この発明は、自動車両の周辺の、カメラ手段によって提供された画像を、図形的に処理する方法に関する。
【解決手段】その画像は、周辺にある障害物から生じる、自動車両に対する危険性が、ドライバーによって光学的に視覚化され、またはドライバーのために強調されるように、処理される。この発明によれば、カメラ手段によって提供された画像は、ドライバーのために一層明瞭に危険性を強調するために、画像における障害物の位置を考慮して処理される。この目的のために、自動車両の周辺における障害物の実際の位置は、はじめに決定される。続いて、周辺における障害物の実際の位置に対応する、画像における障害物の位置が決定される。
(もっと読む)
移動制御システム
本発明は、車両またはロボットアームなど移動プラットフォームの制御に使用できる移動制御システムに関する。本発明は特に車両用の運転支援、車両用のセルフパーキング支援システムに利用できる。3次元カメラ(12)がプラットフォーム、例えば車(102)上に置かれ、プラットフォームまわりの環境を撮像する(114)ように配置される。プロセッサ(7)が3次元情報を用いて環境モデルを生成し、このモデルを利用して移動制御信号を生成する。好ましくは、プラットフォームは環境に対して移動し、様々な位置からの環境の複数の画像を取得する。 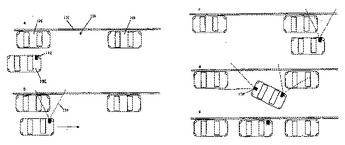 (もっと読む)
(もっと読む)
検出装置の検出領域で障害物を検出する方法
この発明は、障害物の存在する空間をモニタするための方法および装置に関する。このモニタ装置は、通常、少なくとも1つの送信装置と第1および第2の受信装置を有する。この発明の目的は、情報の信頼性を改善する方法および装置を提供することである。この目的のために、第1受信装置よりも送信装置からより離隔している第2受信装置の信号が、その寄生信号部分のために評価される。第1および第2受信装置間の距離があまりに大きくなければ、この第2受信信号に検知される寄生信号部分が、第1信号にも含まれていると仮定することができる。この場合に、望ましいことは、その空間をモニタすることを中止すること、あるいは、少なくとも寄生信号部分が第2受信信号の繰返し評価において検知されない間に既に得られたこの検知のいかなる結果をも破棄することである。 (もっと読む)
341 - 344 / 344
[ Back to top ]