
Fターム[5H301AA04]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の可動空間、領域、経路 (2,962) | 水上 (15)
Fターム[5H301AA04]に分類される特許
1 - 15 / 15
走行ロボット
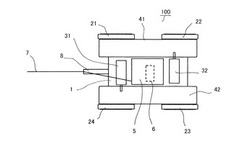
【課題】巻取装置を使用して急傾斜の階段でも安定した昇降が可能であり、且つ階段の踊り場のような狭い場所でも旋回が可能な走行ロボットを提供する。
【解決手段】階段200を上昇又は下降するときに、ワイヤ7若しくはケーブル70の一端を階段200の上方部に固定し、車体1が階段200を降下するときはワイヤ7若しくはケーブル70を送り出し、車体1が階段200を上昇するときはワイヤ7若しくはケーブル70を巻取るように巻取装置5を制御し、且つ、角度検出器9が検出した車体1の角度に基づいて巻取りの停止及び巻取りの開始を制御するようにした。
(もっと読む)
水中移動型検査装置及び水中検査設備

【課題】 海底構造物等の検査対象物が航走体の質量に基づく力を受けて損傷することを防止できるようにすると共に、検査対象物の検査を含む各種作業の質の向上を図ること。
【解決手段】 航走しながら海底パイプライン(検査対象物)13を検査することができる水中移動型検査装置11であって、潜水して、海底パイプライン13に対して非接触状態で検査対象物を辿りながら航走する航走体14と、この航走体14に設けられている第1可動アーム部16と、この第1可動アーム部16に設けられ、海底パイプライン13を検査するための検査用ツール部17と、航走体14が、海底パイプライン13に対して非接触状態で辿りながら航走するときに、第1可動アーム部16を作動させて、検査用ツール部17が海底パイプライン13に対して所定の目標位置関係となるように、検査用ツール部17を移動させることができる制御部とを備える。
(もっと読む)
移動機械の移動方法
【課題】移動機械および移動機械周囲の状況を常に把握しつつ当該移動機械を移動すること。
【解決手段】複数の移動機械1A,1Bを用い、全ての前記移動機械1A,1Bにおいて、任意の移動機械1B(1A)により他の1つの移動機械1A(1B)を包含する空間情報を取得し、当該空間情報に基づいて前記他の1つの移動機械1A(1B)を移動させる。これにより、移動機械1A,1Bおよび移動機械1A,1B周囲の状況を常に把握しつつ当該移動機械1A,1Bを移動することができる。
(もっと読む)
遠隔協調輸送手段のためのシステムおよび方法
輸送手段システムを制御するための方法およびアーキテクチャシステムを開示する。一実施形態において、輸送手段を遠隔制御する方法は、輸送手段の位置を推定することを含む。位置推定アルゴリズムは、輸送手段の位置を推定することができる。輸送手段から受信された位置データパケットを用いて、輸送手段の推定位置を更新できる。表示装置は、更新された輸送手段の推定位置に基づいて輸送手段の仮想表現を表示してもよい。表示された輸送手段の仮想表現に基づいて、コマンド信号を輸送手段へ伝達してもよい。  (もっと読む)
(もっと読む)
船舶用位置保持制御装置
【課題】風や潮流等による外乱がある場合にも船舶の定点保持を実現させる。
【解決手段】船舶の船舶座標系での現位置と目標保持位置26との前後方向偏差を位置偏差演算部30で演算し、その演算される前後方向偏差に基づいて、発生させるべき前後方向推進力をPID制御演算部32において演算する。また、船舶の船舶座標系での現位置と目標保持位置26との横方向偏差を位置偏差演算部30で演算すると共に、船舶に作用する外乱の方向を外乱推定演算部34で推定し、その演算される横方向偏差及び推定される外乱の方向に基づいて、発生させるべき回転方向モーメントを演算する。
(もっと読む)
無人ボート自動観測システムおよび無人ボート自動観測方法
【課題】観測航路を自動的に生成しその観測航路下の水中または水底の様子を自動的に観測できるようにする。
【解決手段】観測航路を生成するために基準観測線を入力し(S1)、前記基準観測線を一定の距離平行移動させることによって複数の観測航路を生成し(S2)、生成された複数の観測航路の距離を確定させると同時に確定させた観測航路の航行順序を指示し(S3)、指示された航行順序にしたがって無人ボートを航行させ(S4)、航行中に少なくとも水中または水底の様子のいずれかを観測し(S5)、観測されている少なくとも水中または水底の様子を表示するとともに記憶させる(S6)。
(もっと読む)
空間安定装置
【課題】従来の空間安定装置は、第1及び第2ペイロードの大きさ及び位置が異なる場合に、俯仰軸部の第1及び第2端部で発生する外乱トルクにアンバランスが生じ、姿勢制御部による姿勢制御が乱されて、姿勢制御の安定性が低下してしまう。
【解決手段】本発明による空間安定装置は、第1及び第2ペイロード31,32の姿勢を示す姿勢制御部41からの姿勢情報41aと、風61の向き及び速度を示す風検出器60からの風情報60aとに基づいて、第1及び第2風圧制御器51,52の可動片の角度を制御して、風61によって俯仰軸部22の第1及び第2端部221,222で発生する風圧を互いに等しくする構成である。
(もっと読む)
模型船試験装置
【課題】装置構成が簡素で、航行計画の変更が遠隔操作で可能な模型船試験装置を提供する。
【解決手段】陸上3のパソコンから無線LANを介して模型船2上のパソコンを操作して模型船2上のパソコンに航行計画を設定すると共に、模型船2上のパソコンに設定されている航行計画や模型船2上のパソコンが収集した計測データを陸上3のパソコンに送信し、その計測データを陸上3のパソコンで表示できるようにした。
(もっと読む)
移動体制御システム及び移動体制御方法
【課題】高価な集中制御装置を用いることなく、各移動体の移動経路を最適化できるようにする。
【解決手段】移動体制御システム1を、移動体の自己位置を特定する自己位置特定手段2と、他の移動体の存在を検知する移動体検知手段3と、前記移動体の駆動中に得られる前記自己位置に関する情報及び前記他の移動体の存否に関する情報に基づいて、前記移動体同士が出合うことの多い場所を示す出合多発エリアを設定する出合多発エリア設定手段4と、前記出合多発エリア設定手段により設定される前記出合多発エリアに基づいて、前記移動体の行動計画を生成する行動計画生成手段5とを具備して構成する。
(もっと読む)
操船制御方法、プログラム及び装置、並びに自動操船制御システム
【課題】他船や航走体へ追従する操船や、自動操船以外の他の制御装置との間で連携を図った制御が実現できる操船制御方法、プログラム及び装置、並びに自動操船制御システムを得る。
【解決手段】海面又は海中を航行する他船2の位置に関する情報を取得するステップと、少なくとも他船2の位置に関する情報に基づき、自船1が他船2に追従するように、自船1を自動操船させる指令値を求めるステップと、該指令値の情報を自動操船装置20へ出力するステップとを有するものである。
(もっと読む)
ロール補償を提供する方法及び装置
本開示の実施形態は制御装置(110)においてロール補償を提供する方法及び装置に向けられ、前記方法及び装置は前記制御装置(110)の動きを示す回転データ及び直線データを獲得し(310)、その獲得したデータにロール補償を適用し(320)、そのロール補償したデータからロール補償エラーを除去する(330)ことを含む。回転データ及び直線データを獲得するためにジャイロスコープセンサ(230,240)及び加速度計センサ(250)等の慣性センサを使用することができる。  (もっと読む)
(もっと読む)
構造体の位置・方位制御方法、構造体の位置・方位制御システム及びプログラム
【課題】構造体の位置及び方位を一定に保持するように構造体の位置、方位の制御を行う際、推力方向を制限した条件下、オンラインで推力の分配を行う。
【解決手段】構造体の重心に作用すべき制御力のベクトルを、複数のアクチュエータに付与すべき推力を2方向に分解した分力のベクトルと拡散型推力分配行列とによって表し、推力の分力に関する第1の解を、複数のアクチュエータの推力の二乗和が最小にする第2の解と、拡散型推力分配行列の特異値分解をしたときに求められる直交行列を所望の調整ベクトルに作用して得られる処理ベクトルとを加算して線形和で表す。調整ベクトルは、アクチュエータに与えた推力方向の稼動範囲の制限に基づいて求める。構造体の位置、方位の制御を行う際、先に求めた調整ベクトルに直交行列を作用させた処理ベクトルを第2の解に加算して第1の解を求め、この第1の解の成分をアクチュエータに与える推力の成分とする。
(もっと読む)
追尾システム
【課題】追尾対象を限定することなく、かつ方向あるいは距離について広範囲に適用することのできる追尾システムを提供する。
【解決手段】第1の移動体に設けられた移動速度伝送装置1と、第1の移動体を追尾する第2の移動体に設けられた追尾装置2とを備え、移動速度伝送装置1は、第1の移動体の加速度を検出する加速度センサ3と、加速度に対して所定の処理を行い送信信号として出力する情報処理部4と、送信信号を無線電波5として送信する送信部6とを有し、追尾装置2は、無線電波5を受信して受信信号として出力する受信部7と、受信信号に基づいて第1の移動体に対する追尾速度を制御する制御部8とを有するものである。
(もっと読む)
GPSを利用した浄化装置の移動ルート制御法
【課題】浄化装置の移動ルートを複雑な形状を有する湖沼に対応させることを課題とする。
【解決手段】位置発信器6、GPS受信機2の信号にて湖沼中における浄化装置の位置を場所算出手段で算出し、予め設定した移動ルートに従って移動する様、移動方向算出手段4で算出した結果を推進装置駆条件算出手段5で浄化装置に設置した推進方向を制御する制御装置7の制御量を計算し制御装置を駆動する。また、磁石で浄化装置の推進方向を測定し磁石情報14とし移動方向算出手段に信号を伝送し浄化装置の推進方向制御を円滑にする。尚、湖沼形状、浄化装置の移動ルートを情報入力装置10で入力する。入力情報は、表示装置9の表示画面内に出力させ、情報保管装置8で保管する事ができる。
(もっと読む)
浮遊移動体の制御システム
この発明の目的は、波浪や潮流等による外乱下にあっても、浮遊移動体を所定位置に精度良く静止させたり、或いは目標軌道に精度良く追従させたりすることが可能な浮遊移動体の制御システムを提供することにある。
上記目的を達成可能な本発明の浮遊移動体の制御システムは、浮遊移動体10の制御システム1であって、上記浮遊移動体が、浮遊移動体の一部を占める、単一剛体とみなし得る本体部Bと、浮遊移動体に対して推力を発生する効果器部Eと、本体部と効果器部を力学的に結合する部分であり、効果器部から本体部に作用する推力を実測できるよう構成された推力伝達ゲートGとからなっており、上記推力伝達ゲートGからの推力測定値を用いて効果器部Eに対する推力指令を得る様にしたことを特徴とするものである(図4)。
(もっと読む)
1 - 15 / 15
[ Back to top ]