
Fターム[5H301AA10]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の可動空間、領域、経路 (2,962) | 所定の空間、領域を自由に移動可能なもの (867)
Fターム[5H301AA10]に分類される特許
321 - 340 / 867
車両
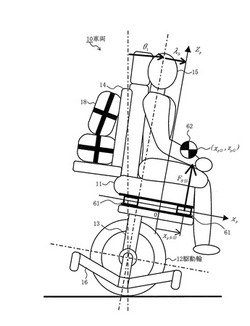
【課題】車体傾斜状態の計測値と推定値とを比較することによって、車体傾斜状態の計測値の異常を確実に検出することができるようにする。
【解決手段】回転可能に車体に取り付けられた駆動輪12と、該駆動輪12に付与する駆動トルクを制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、前記車体の鉛直軸に対する傾斜角を計測する傾斜計測手段と、前記駆動輪12の回転状態及び前記駆動トルクによって前記傾斜角を推定する傾斜推定手段と、前記傾斜計測手段によって計測された傾斜角と前記傾斜推定手段によって推定された傾斜角との差の絶対値が所定値より大きい場合に前記傾斜計測手段によって計測された傾斜角が異常であると判定する判定手段と、を備える。
(もっと読む)
車両の誘導装置

【課題】
走行コースの修正を作業効率よく行うようにする(ティーチングによる方法よりも作業効率よく走行コースの修正を行う)。
【解決手段】
走行位置計測手段で計測される無人車両の走行位置と、該無人車両の誘導コースを規定するコースデータとに基づいて、前記無人車両を前記誘導コースに沿って誘導走行させる無人車両の誘導装置であって、コースエリアの境界線のデータを入力する手段と、移動起点の位置とその位置における前記無人車両の方向および移動目的点の位置とその位置における車両進行方向とをそれぞれ指示する手段と、前記移動起点の位置および移動目的点において、前記指示された位置と車両進行方向が満足されるコースデータを作成する手段と、前記作成されたコースデータで規定される誘導コースで無人車両を走行させた場合の該無人車両と前記コースエリアの境界線との干渉を推認する手段と、前記干渉が推認された場合に、前記コースデータを変更するコースデータ変更手段と、を備える。
(もっと読む)
自律移動装置
【課題】進行方向を長手方向とする本体形状であっても、本体周囲の障害物を適切に避けて目標物を追従できる自律移動装置を提供する。
【解決手段】レーザレンジファインダで捕捉した目標物の本体に対する相対位置情報と障害物センサで検出した周囲障害物の情報とに基づいて、本体の進行方向を、目標物の方向に障害物が検出されない場合はこの目標物の方向に決定し、障害物が検出される場合は本体を中心に放射状に広がる空間で障害物が検出されない空間のうち目標物に最も近い空間の方向に決定する。そして、決定された進行方向に本体を向けるために旋回を要するとき、その旋回領域内に障害物があるときには進行方向を直進方向に補正する。
(もっと読む)
移動体および操作方法
【課題】本発明は、安全性を確保して容易に操作できる移動体を提供する。
【解決手段】路面上を移動するための車輪と103、前記車輪103を駆動する駆動装置と、前記駆動装置を制御する制御装置と、前記制御装置に操作者104が所望の移動指令を与えるための操作装置102と、全体を覆う外装105とを備えた移動体101において、前記操作装置104は、前記外装105のうち前記路面に略平行な上面部に配置されるものである。
(もっと読む)
移動体
【課題】予め設定された走行経路に沿ってより精度良く正確に走行できる移動体を提供する。
【解決手段】車体2と、車体2を前後方向及び旋回方向に駆動させる駆動機構4と、駆動機構を制御する駆動制御装置3と、車体2の前後方向を撮像するように配設された第1カメラ6及び第2カメラ7とからなり、駆動制御装置3は、予め取得した教示画像群を記憶する画像記憶部21と、教示画像群と第1カメラ6により撮像された第1の取得画像と第2カメラ7により撮像された第2の取得画像とに基づいて車体2が走行経路に沿って走行するように駆動機構を制御する走行制御部22とから構成する。
(もっと読む)
走行制御装置
【課題】車両が目標ランプに向かって自動的に走行するように制御する走行制御装置を提供する。
【解決手段】走行制御装置において、カメラは、車両走行の目標となる方向に位置する目標ランプを撮像する。画像処理部32は、カメラにより撮像した撮像画像を処理する。走行制御部36は、撮像画像に含まれる目標部画像の位置と車両の初期位置との関係で定まる目標走行ラインを走行するように車両の走行を制御する。ヨー角検出部42は、撮像画像から目標部に対する車両のヨー角を検出する。横偏差算出部50は、撮像画像から目標走行ラインからの横偏差を算出する。走行制御部36は、ヨー角および横偏差にもとづいて車両の走行を制御する。
(もっと読む)
ロボット制御システム及びロボット制御方法
【課題】ユーザが、室内の所望の場所のみの掃除を行わせる作業等(その内容を確定させるために場所の指定を必要とする作業)をロボットに容易に行わせることが可能な環境を実現できるロボット制御システムを提供する。
【解決手段】ロボット制御システムを、ディスプレイ21上に、管理対象エリアの状況/様子を示す画像を表示するシステムであって、ディスプレイ21に表示されている画像上にユーザによって描画された線分図形の形状及び位置から、ロボット25に行わせるべき作業の内容を把握し、把握した内容の作業を行うようにロボット25を制御するシステムとして構成しておく。
(もっと読む)
移動体の三次元群制御方法
【課題】本発明が解決しようとする課題は、三次元移動体の群制御に関するものであって、従来のような厄介な制御ではなく、しかも群が集合状態を維持しながら同一方向へ移動する機能、作業対象の周囲を定点旋回移動する機能を安定して備えた群制御手法を提示することである。
【解決手段】本発明に係る移動体の三次元群制御方法は、対象個体周辺の外側から内側に向かって接近領域,平行領域,そして反発領域の順に球状若しくは楕円球状の三層構造からなる相互作用領域を設定し、周辺個体がどの領域に存在するかに応じて接近ルール、平行ルールそして反発ルールからなる行動モデルをアルゴリズムとして適用するものである。
(もっと読む)
移動ロボット制御システム、経路探索方法、経路探索プログラム
【課題】インフラなどの設置を必要とせずに、自律移動ロボットを所望の走行ルールを反映させた経路に従って移動させること。
【解決手段】移動ロボット制御システムは、移動装置21を有する車両と、車両が所定の移動領域を移動する際の走行ルールが予め定められており、走行ルールに応じて所定の移動領域の経路探索コストを変化させる走行ルール情報を含む地図情報を記憶する地図情報記憶部25(15a)と、地図情報記憶部25(15a)に記憶された地図情報に基づいて、移動始点から移動終点に至る経路を探索する経路探索部23と、経路探索部23で探索した経路に基づいて、移動装置21の制御指令値を生成する移動制御部24と、を備える。
(もっと読む)
追従制御装置及び追従制御方法
【課題】追従性を向上した追従制御を課題とする。
【解決手段】車両1に対する移動目標としての電波発信源8の位置を推定し、推定した電波発信源8の位置に向かうように車両1の移動を制御する追従制御する技術である。上記車両1に対し平面視で互いに重ならない位置に複数の無線通信手段を設定して、上記電波発信源8からの電波の受信に基づき、各無線通信手段から電波発信源8までの各相対距離を取得する。取得した複数の相対距離から、車両1に対する電波発信源8の相対位置情報を推定する。そして、推定した相対位置情報に含まれる誤差が小さなる領域に、車両1の移動すべき方向を設定する。
(もっと読む)
車両装置及びその制御方法
【課題】車両本体が持ち上げられたときに車輪が不意に回転される事態を防止する。
【解決手段】本発明による平行2輪車は、車両本体(乗員が立つ部分)1と、車両本体1に同軸上に取り付けられた1対の駆動ユニット2A及び2Bと、乗員がつかまるT字型のハンドル3と、車両本体1の前後(Y軸周り)の傾き検出装置4とからなる。さらに本発明では、ハンドル3の端部に空転制御設定装置5が設けられる。また車両本体1には、図示しないが、車両の制御を行う制御装置と空転制御装置が設けられている。そして運搬モードでは、空転制御設定装置5からの信号によって制御装置に内蔵された空転制御装置が発動される。これによって、空転制御装置からは、例えば、速度を0にする、または位置を固定にするような制御トルクが、駆動ユニット2A及び2Bに供給される。
(もっと読む)
車両の制御装置
【課題】予め定められた経路上を移動する車両を制御する制御装置であって、経路途中のどの場所でも一時停止でき、移動の開始や停止に関して人間による指令操作は不要な車両の制御装置を提供する。
【解決手段】点線で示された車両2からのポーリング信号が到達可能な通信可能範囲内に携帯機3が位置するときには、車両2は携帯機3から返信された識別信号を受信し、これにより車両2は停止状態となる(a)。次に、携帯機3を携帯した操作者が車両2の通信範囲外に出たら(b)、車両2は携帯機3からの識別信号を受信しなくなるので車両2が移動経路4上を動き出す。車両2が移動したことによって、再び携帯機3が車両2の通信可能範囲内に入ったら(c)、再び車両2は携帯機3からの識別信号を受信することとなって車両2は停止状態となる。そして携帯機3を携帯した操作者が再び車両2の通信範囲外に出たら(d)、車両2は携帯機3からの識別信号を受信しなくなるので車両2が移動経路4上を動き出す。
(もっと読む)
車両
【課題】緊急停止時に車体を特定方向に確実に傾斜させることで、緊急停止時における乗員の不安感や不便さを解消するのと共に、逆側の車体傾斜制限機構が不要となるので、車両の軽量・小型化が可能であり、その結果、使い勝手がよく、かつ、安全に使用することができるようにする。
【解決手段】回転可能に車体に取り付けられた駆動輪と、移動可能に前記車体に取り付けられた可動質量と、可動質量を特定方向に付勢する付勢手段と、可動質量を固定する固定手段と、駆動輪に付与する駆動トルクを制御して車体の姿勢を制御する車両制御装置とを有し、車両制御装置は、車体の姿勢制御実行時に可動質量を固定し、また、車体の姿勢制御停止時に可動質量を解放するように、固定手段を制御する固定解放制御手段とを備える。
(もっと読む)
船舶用位置保持制御装置
【課題】風や潮流等による外乱がある場合にも船舶の定点保持を実現させる。
【解決手段】船舶の船舶座標系での現位置と目標保持位置26との前後方向偏差を位置偏差演算部30で演算し、その演算される前後方向偏差に基づいて、発生させるべき前後方向推進力をPID制御演算部32において演算する。また、船舶の船舶座標系での現位置と目標保持位置26との横方向偏差を位置偏差演算部30で演算すると共に、船舶に作用する外乱の方向を外乱推定演算部34で推定し、その演算される横方向偏差及び推定される外乱の方向に基づいて、発生させるべき回転方向モーメントを演算する。
(もっと読む)
自律移動ロボットシステム
【課題】自律移動ロボットシステムにおいて、簡単な構成により、自律移動ロボットが危険な領域に進入することがなく安全で自律的な移動動作を制限されず移動可能とし、そのような稼働環境を容易かつ低コストで実現可能とする。
【解決手段】システム10は、ロボット1と稼働環境に設置されたマーク2とを備え、ロボット1は、記憶手段5に記憶された情報および制御パラメータに基づいて走行経路を生成する経路生成手段6と、走行経路に沿って移動手段71を制御して自己の位置を移動させる移動制御手段7と、安全確認用のマーク2を検出するためのマーク検出器8とを備え、マークは、ロボット1が安全に移動可能な領域においてのみマーク検出器8によって検出されるようにロボット1の稼働環境に設置されており、移動制御手段7は、マーク検出器8によってマーク2が検出される間は移動を継続し、マーク2が検出されないときは移動を停止して安全を確保する。
(もっと読む)
車両
【課題】車両の走行速度に依らず、いつ倒立制御を停止しても車体を安定した状態に維持することを可能とし、異常時における緊急停止に即時に対応することができ、高い走行性能や利便性を備え、かつ、安全に使用することができるようにとする。高い走行性能や利便性を備え、且つ、安全に使用することができるようにする。
【解決手段】車両制御装置は、車両の走行速度に応じて減速度の時間変化を予測する減速度予測手段と、減速度予測手段によって予測された減速度の時間変化に応じて、前記姿勢制限手段の位置や形状を制御する姿勢制限制御手段とを備える。
(もっと読む)
車両
【課題】センサの計測値を取得することができない場合には、車体の傾斜状態及び駆動トルクから駆動輪の回転状態を推定することによって、駆動輪の回転状態を取得することができない状況下であっても倒立姿勢での走行を維持することができるようにする。
【解決手段】回転可能に車体に取り付けられた駆動輪12と、該駆動輪12に付与する駆動トルクを制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、前記車体の傾斜状態及び前記駆動トルクによって前記駆動輪12の回転状態を推定する回転推定手段を備える。
(もっと読む)
車両
【課題】センサの計測値を取得することができない場合には、駆動輪の回転状態及び駆動トルクから車体の傾斜状態を推定することによって、車体傾斜状態を取得することができない状況下であっても倒立姿勢での走行を維持することができるようにする。
【解決手段】回転可能に車体に取り付けられた駆動輪12と、該駆動輪12に付与する駆動トルクを制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、前記駆動輪12の回転状態及び前記駆動トルクによって前記車体の傾斜角を推定する傾斜推定手段を備える。
(もっと読む)
自律移動ロボットの動作計画装置、方法、プログラム及び記録媒体並びに自律移動ロボットの動作制御装置及び方法
【課題】より安全で、より動作計画が破綻しづらい自律移動ロボットの動作計画を行う。
【解決手段】衝突判定部4が、互いに異なる複数の一時的な流れが生じた場合に、各状態にある上記自律移動ロボットが各行動に基づいて移動した場合に障害物に衝突するかどうかを判定する。衝突確率計算部6が、衝突すると判定された一時的な流れが生じる確率の総和である衝突確率を計算する。報酬決定部7が、衝突確率を考慮して報酬を決定する。動的計画部2が、報酬に基づいて動的計画を行う。
(もっと読む)
移動ロボット、走行計画マップ生成方法、管理システム
【課題】走行計画マップを自動的に生成及び更新可能な移動ロボット、移動ロボットの走行計画マップ生成方法、移動ロボットの管理システムを提供すること。
【解決手段】移動ロボットは、操縦モード時に操縦者が移動ロボットを操縦する操縦部10と、移動ロボットの現在位置を推定する位置推定部12と、移動ロボットの現在速度を検出する速度検出部14と、操縦モード時に、位置推定部12の推定結果と速度検出部14の検出結果を含む移動ロボットの走行履歴情報を収集する走行履歴情報収集部15と、走行履歴情報に基づいて、移動ロボットの走行計画マップ17を生成し、更新する走行計画マップ生成更新部16と、走行計画マップ17を用いて、移動ロボットの走行経路を計画する走行計画部18と、計画した走行経路に追従するように、移動ロボットの走行を制御する走行制御部19を備える。
(もっと読む)
321 - 340 / 867
[ Back to top ]