
Fターム[5H301AA10]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の可動空間、領域、経路 (2,962) | 所定の空間、領域を自由に移動可能なもの (867)
Fターム[5H301AA10]に分類される特許
861 - 867 / 867
輸送手段の位置、姿勢、および/または飛行方向を推定するシステムおよび方法
輸送手段の位置、姿勢、および飛行方向のうちの少なくとも1つを推定するシステムを開示する。このシステムは、輸送手段の3つの相互に直交する軸の回りの慣性角速度を示す信号を出力するように構成された少なくとも3つのジャイロスコープと、輸送手段の3つの相互に直交する軸に沿った加速度を示す信号を出力するように構成された少なくとも3つの加速度計とを含む。このシステムは、さらに、輸送手段の3つの相互に直交する軸への周囲磁場の射影を示す信号を出力するように構成された3軸磁力計を含む。このシステムは、輸送手段高度を示す信号を出力するように構成されたセンサと、輸送手段の対気速度を示す信号を出力するように構成された差圧センサとも含む。このシステムは、さらに、諸信号を受け取り、輸送手段の位置、姿勢、および飛行方向のうちの少なくとも1つを推定するように構成されたデバイスも含む。 (もっと読む)
自律移動ロボットの航法システム及びこの航法システムに利用される絶対座標を提供するフロア材
本発明は移動手段が装着された本体を有する自律移動ロボットの航法システムを提供する。本発明の航法システムは所定大きさを有するフロア面にお互いに所定の離隔距離を有するように形成されて、お互いに異なる固有座標値を有する二次元バーコードと、前記本体の下部所定位置に設置されてフロア面の二次元バーコードを読むようになされたバーコードリーダーと、前記本体に設置されてバーコードリーダーと電気的に連結されてバーコードリーダーが読んだ二次元バーコードの固有座標値によってメモリーに保存された所定の設定領域内での絶対座標を認識して、プログラムされた移動アルゴリズムに認識した絶対座標を適用して本体が移動できるように移動手段を制御する制御部とを含む。 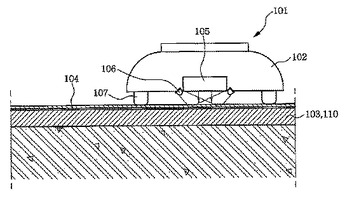 (もっと読む)
(もっと読む)
自律ロボットのドッキング方法
ロボット装置を基地局とドッキングさせるための方法は、オンボードバッテリにおいて低エネルギー準位を検出するステップと、前記ロボットを、前記ステーションによって放射された2つの赤外線ビームの間に検出された重複に対して方向を合わせるステップと、前記ロボットおよび前記基地局における充電端子の間の接触を検出するステップと、オンボードバッテリに充電するステップと、掃除機かけなどのロボットのタスクを再開するステップとを含む。前記ロボットと前記基地局との間の不注意による接触を防止するために回避信号を放射するためのシステム、および前記ロボット装置を前記基地局と正確にドッキングさせるために帰還信号を放射するためのシステムも開示される。 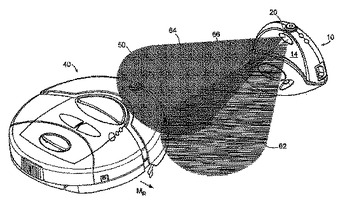 (もっと読む)
(もっと読む)
自走式クリーナ

【課題】 床への設置面積が小さく容易に小回りを行い、また、全体的な重量バランスがよく安定性に優れ、しかも、狭い隙間を確実に掃除する。
【解決手段】 自走クリーナ1の底面に第1の吸引口6を形成し、この吸引口6の長手方向側面に沿って案内部10を設け、この案内部と第1の吸引口との間に連通部12を設ける。案内部内に管体11の摺動部13を摺動自在に配置し、この摺動部の先端に第2の吸引口14aを設けたノズル部14を設ける。摺動部の後端部側を閉塞し、その後端部から延長部材15を延出させ、この延長部材にラックギアを形成する。また、摺動部の後端部側における第1の吸引口側には開口部13aを設ける。そして、モータ16の回転を延長部材に伝え、延長部材を押し出したときはノズル部を自走クリーナから突出させて狭い隙間の掃除を行い、また、延長部材を引き上げたときにはノズル部を自走クリーナ内に収納する。
(もっと読む)
双操舵飛しょう体の制御装置

【課題】 同位相双操舵を行なう制御装置に関し、舵角が飽和した時にも加速度制御の応答性を高く保ち、優れた飛しょう性能を維持できる飛しょう体制御装置を提供する。
【解決手段】 入力された加速度指令信号、加速度信号及び角速度信号から前翼舵角指令信号及び後翼舵角指令信号を算出し、前翼舵角指令信号を後翼舵角指令信号で修正した修正前翼舵角指令信号を前部操舵装置に、後翼舵角指令信号を後部操舵装置に出力するオートパイロット、修正前翼舵角指令信号が既定値を越えたとき、修正前翼舵角指令信号、既定値、及び調整係数から算出した調整指令信号を後翼舵角指令信号から引き後翼舵角を低減させる後翼抑制装置を設けた。これにより、前翼舵角が飽和し始めたとき後翼抑制装置により後翼の戻しができ、後翼のリフトの低減による前翼のリフト分の増大により、モーメントを発生させて高迎角にし、高応答性となり飛しょう性能が向上した。
(もっと読む)
自立移動装置
【課題】 掃除機本体の下部に対応する障害物だけでなく上部に対応する障害物も検知して適切な走行輪の制御ができる掃除装置を提供する。
【解決手段】 掃除機本体12の前側に上側バンパ24および下側バンパ25を設ける。掃除機本体12の上部に対応する高さの障害物の上側バンパ24による検知で、制御回路が走行輪15を制御して障害物への衝突を回避する。掃除機本体12が乗り越え可能な高さより高い障害物の下側バンパ25による検知で、制御回路が走行輪15を制御して障害物への衝突を回避する。掃除機本体12が乗り越えられない障害物を下側バンパ25で検知する。掃除機本体12の上端が衝突する障害物を上側バンパ24で検知する。掃除機本体12が入り込めない隙間への衝突や、障害物の乗り越えで生じる掃除機本体12の転倒をより的確に防止できる。掃除機本体12を床面上で適切に自立移動できる。制御回路にて適切に走行輪15を制御できる。
(もっと読む)
作業車両に於けるポジション制御装置
【課題】 車体のエンジン始動時に作業機昇降用のアクチュエータの駆動を禁止する牽制装置を設けた作業車両に於いて、牽制装置の作動を解除するタイミングを改善して確実な牽制解除を実行する。
【解決手段】 ポジションセンサの計測値とリフトアーム角センサの計測値が一致する設定点(A)を中心として、その上方に所定範囲の上部制限領域(+B)を設けるとともに、その下方に上部制限領域と同一幅の下部制限領域(−B)を設けておく。牽制装置が作動しているときに、リフトアーム角センサの計測値が設定点(A)にあり、ポジションセンサの計測値(C1)が上部制限領域(+B)の外にある場合、または下部制限領域(−B)の外にある場合は、この制限領域の外から一方の制限領域を通り抜けて他方の制限領域に入ったときに、牽制装置の作動を解除する。
(もっと読む)
861 - 867 / 867
[ Back to top ]