
Fターム[5H301AA10]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の可動空間、領域、経路 (2,962) | 所定の空間、領域を自由に移動可能なもの (867)
Fターム[5H301AA10]に分類される特許
801 - 820 / 867
自律移動ロボットの移動経路生成装置

【課題】指定された目的地へ移動する際の情報処理を簡略化し得る自律移動ロボットの移動経路生成装置を提供する。
【解決手段】ロボットの移動領域内における経由候補点としてのノードの位置及び障害物の位置に関わる情報を記述した地図データ7と、ノード同士を所定の基準に基づいて互いに結ぶロボットが通行するべき直線としてのエッジを設定するエッジ設定処理部11aと、地図上でのロボットの現在位置を出力する現在位置検出部15と、ロボットの目的地を地図上にオペレータが入力するユーザ端末13と、設定されたエッジ同士を接続して現在位置から目的地に至る経路を算出するための経路演算処理部11bとを有する自律移動ロボットの移動経路生成装置において、各ノードから所定の距離内にあり且つ途中に障害物がないノードに対してのみエッジが設定されるものとする。
(もっと読む)
移動ロボット

【課題】 段差を非接触で自動的に検知し、段差に応じて乗越え方法を選択することができる移動ロボットを提供するにある。
【解決手段】 移動ロボットの本体フレーム10は、駆動車輪6,12によって走行路上で移動され、本体フレームの走路方向対して前方には、第1の従動輪30が設けられ、その後方には、第2の従動輪32が設けられている。本体フレームの走路方向の距離は、ある俯角で走行路を観察する距離センサ部28によって検出される。俯角を略一定に維持したまま第1の従動輪及び距離センサを一体的に前記本体フレーム上で上下動させる第1の上下動機構及び第2の従動輪を上下動させる第2の上下動機構が本体フレームに設けられ、距離センサ部からの距離信号に基づいて走路上の段差が検出されて本体フレームの移動とともに第1及び第2の上下動機構が上下動される。
(もっと読む)
移動ロボット装置
【課題】目標地点へ到達するまでの途中の移動地点を自動的・動的にロボット自身が決定することができる移動ロボット装置の提供。
【解決手段】移動ロボット装置は、互いに他と識別可能に配置された複数のマーカ34を画像検出しながら移動する。移動ロボット装置は、移動用情報記憶部28に、移動可能な領域の地図情報と、前記各マーカ34の前記地図情報上の位置を示すマーカ配置情報と、前記各マーカそれぞれの指向の特性を示す指向特性情報とを記憶している。ロボット装置へ移動の目標地点を与えると、まず、ロボット装置は現在の自己位置を示す現在位置情報を取得する。そして、移動用情報記憶部28の地図情報、マーカ配置情報、及び、指向特性情報と、前記目標地点と、現在位置情報とから、前記目標地点へ移動するための中間の移動地点を決定する。移動ロボット装置は、その移動地点へ移動する。
(もっと読む)
ロボット制御装置
【課題】自律移動可能な範囲を認識しつつ移動可能な経路を生成するロボット制御装置を提供する。
【解決手段】ロボット前方の人の移動を検知し、人の移動に合わせてロボットを移動させて経路教示データを得て、経路教示データに沿ってロボットが自律移動するとき、周囲物体検出部にて検出したロボット移動空間の天井又は壁位置や障害物の位置より、経路教示データに対するロボット移動可能範囲を算出して自律移動用移動経路を生成し、この自律移動用移動経路に従って、駆動装置の駆動によりロボットを自律移動させるように制御する。
(もっと読む)
自律機械
自律機械(1)は、これが作業区域の一周を完了した時点を確定する必要がある。機械は、本体(2)と環状磁性パック(21)などのマーカとを含む。制御システムは、本体を所定シーケンスに従って作業区域を移動させるよう構成される。検出器(22,33)がマーカを検出するよう配置され、検出器とマーカのうちの一方が本体上に位置している。制御システムは、マーカの検出によって、区域における所定の位置を認識するかまたはシーケンスの所定部分を実行するよう構成されている。マーカが機械の電力ケーブル(9)の上に滑動可能に配置されることが好ましい。  (もっと読む)
(もっと読む)
動的システムを制御するためのシステムおよび方法
動的システムの速度および姿勢を制御するための制御システムは、所望の速度コマンドを受信し、オイラー角コマンドの形式で速度誤差を姿勢制御装置システムに出力するように構成された速度制御装置を備える。制御システムは、さらに、姿勢制御装置システムを含む。姿勢制御装置システムは、オイラー角コマンドを受信し、オイラー角コマンドに基づいて所望の四元数を出力するように構成された変換器を備える。姿勢制御装置システムは、さらに、所望の四元数および動的システムの推定速度および姿勢を示す推定四元数を受信し、動的システムに関連する姿勢誤差を出力するように構成された姿勢誤差生成器を備える。姿勢制御装置システムは、さらに、姿勢誤差を受信し、姿勢誤差に基づいて誤差コマンドを動的システムに出力するように構成された姿勢制御装置も備える。 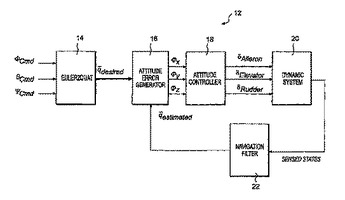 (もっと読む)
(もっと読む)
自走式掃除機
【課題】 コストの高騰を抑制するとともに、未清掃エリアの清掃を確実に行うことが可能な自走式掃除機の提供を課題とする。
【解決手段】 本体BDが位置する現在位置の座標(Xc、Yc)、および、マッピングが行われることにより記憶された未清掃エリアの座標(Xn、Yn)から、下記式(1)を用いて得られる数値(L)の最小値を算出し、最小値とされた数値(L)にかかる未清掃エリアを特定するとともに、同未清掃エリアまで本体BDを走行させて清掃を行うように構成されている。
L=(Xc−Xn)2+(Yc−Yn)2…式(1)
(もっと読む)
ロボットシステム
【課題】 外部環境に影響されずに、ロボットの位置を正確に認識でき、システムの構成に必要とする費用を最小化できるロボットシステムを提供すること。
【解決手段】 本発明は、位相情報を有する光を送出する光送出部と、超音波を送出する超音波送出部を有する位置情報送出ユニットと;前記光を受信する光受信部と、前記超音波を受信する超音波受信部と、前記光受信部を通じて受信した前記光の前記位相情報と前記超音波受信部を通じて受信した前記超音波と、に基づき、前記位置情報送出ユニットに対する相対位置を測定する位置測定部を有するロボットと;を含むことを特徴とする。これにより、外部環境に影響を受けることなく、ロボットの位置を正確に認識できて、システムの構成に必要とする費用を最小化できる。
(もっと読む)
移動型家電機器、移動型家電機器制御方法及び記録媒体
【課題】障害物を回避しつつ壁に沿って移動する移動型家電機器を提供する。
【解決手段】動力を利用して移動する移動部100と、移動方向の横方向に存在する壁を感知する壁センサー部210と、移動方向前方に存在する障害物を感知する障害物センサー部230と、壁センサー部210が感知した壁に関する情報に基づいて壁から所定距離を維持しながら移動型家電機器1000を移動させ、障害物センサー部230が感知した障害物に関する情報に基づいて移動型家電機器1000に障害物を回避させる制御部500を備える移動型家電機器1000である。
(もっと読む)
災害救助ロボット、及び災害救助支援システム
【課題】 居室内に予め設置され、平常時にインターフォンとして機能し、災害時に災害救助機能を有する災害救助ロボットを利用した災害救助支援システムを提供することを課題とする。
【解決手段】 支援システム1は、複数の居室9にクローラ機構部をコンパクトに格納した状態で設置された複数のロボット2と、該ロボット2と無線通信ネットワーク10を介して種々の情報を送受可能に形成され、災害の発生時には、ロボット2を遠隔制御し、居室9に取り残された要救助者11の探索及び発見に利用可能な支援コンピュータ3とによって主に構成されている。ここで、平常時及び災害時に取得され、支援コンピュータ3に記憶された居室情報20等を利用し、要救助者11の早期の発見が可能となる。
(もっと読む)
自走式移動車
【課題】 本体に設けられた撮像センサが検出した画像に基づいて本体の移動が制御される自走式移動車において、撮像センサが占めるスペースの省スペース化を図ることで、自走式移動車の一層の小型化を実現することができる自走式移動車を提供する。
【解決手段】 撮像センサ9は、床面Fを撮像可能な撮像部10を含むセンサ本体9aを自走車としての掃除機本体内に配置しており、導光ケーブル13が床面Fからの光を撮像部10に導いている。掃除機の下部に延びる導光ケーブル13は、占有スペースが小さく、掃除機の小型化に寄与する。導光ケーブル13は、発光部からの光を導いて床面Fに照射する照射用導光ケーブルを、撮像用導光ケーブルと互いに同軸に、好ましくは撮像用導光ケーブルの周囲に配置することで、内包された同軸導光ケーブルとすることができる。センサ本体9aには、撮像部10が撮像した画像データを処理し変位量を算出する信号処理部設けることができる。
(もっと読む)
移動ロボットの物体位置認識装置及びその方法
【課題】 ロボット掃除機などの移動ロボットが物体と衝突した時、物体の位置を正確に認識することができ、衝突回避動作に要する時間を減少させることができる移動ロボットの物体位置認識装置及びその方法を提供する。
【解決手段】 移動ロボットの物体位置認識装置は、移動ロボットのバンパー50の第1領域を感知し移動ロボットのバンパーが物体と衝突した時バンパーの第1移動距離値L1を測定する第1光学センサ10と、バンパーの第2領域を感知しバンパーが物体と衝突した時バンパーの第2移動距離値L2を測定する第2光学センサ20と、測定したL1とL2に基づいて移動ロボットの移動方向を制御するための制御信号を発生するマイクロコンピュータ30と、マイクロコンピュータ30の制御信号によって移動ロボットを移動させる駆動部40とを備える。
(もっと読む)
自走式機器およびそのプログラム
【課題】複数の監視カメラやセンサを家庭内に設置することなく、容易に監視対象の追跡を行うことが可能な自走式機器を提供することを目的とする。
【解決手段】機器本体1の現在位置を判定する現在位置判定部8と、監視対象の位置を検出する監視対象位置判定部11と、現在の時間を判定する時間判定部12と、監視対象位置判定部11において判定された監視対象の位置情報と時間判定部12で判定された時間情報とを記憶する記憶部13と、記憶部13において格納されている監視対象の位置情報と時間情報から次の移動先を予測する移動先予測部14とを備えた。これにより、監視対象が予め設定された監視範囲を超えて移動した場合に、監視対象の現在位置を予測することが可能となり、複数の監視カメラやセンサを家庭内に設置することなく、容易に監視対象の追跡を行うことが可能である。
(もっと読む)
移動体の自己位置同定装置および移動体の自己位置同定方法
【課題】特別な構造体やマーカを設置することなく移動体の自己位置を同定することが出来、そのための作業の負荷を軽減できる自己位置同定装置およびその同定方法を提供する。
【解決手段】移動体1に備えた全方位カメラ2と、周囲のエッジ位置情報を入力するデータ入力部3と、データ入力部3を介してエッジ位置情報を入力するコンピュータ4を備え、コンピュータ4は、エッジ位置情報を記憶するエッジマップ記憶部5と、全方位カメラ2からの視覚情報をもとにエッジを検出するエッジ検出部6と、エッジ検出部6からのエッジ情報をもとに移動体1の位置、姿勢を同定する演算部7を備え、撮像画像から周囲の柱や壁などの垂直成分エッジ8の方向を算出し、記憶したエッジマップ上から算出された方向でエッジが観測される位置及び姿勢を探索することで、移動体1の自己位置同定を行う。
(もっと読む)
超音波センサを備えた移動機械
【課題】超音波センサを備えた移動機械において、広い視野を少ない個数の超音波センサでカバーするとともに、障害物検知の時間間隔の短縮を実現する。
【解決手段】移動機械は、送波素子21及び送波素子21から送波されて超音波反射物体22によって反射される超音波を受波する所定の波長間隔以下で1次元又は2次元に配列された複数の受波素子31を有して水平方向に対して所定の角度を持つように移動機械本体に備えられた超音波センサ2と、走行移動するための走行制御手段とを備えて自律的に移動する。障害物検知手段35は、送波素子21による送波と受波素子による受波とを間欠的に行って、超音波反射物体22までの距離と方向とを求め、距離画像生成手段36、2次元イメージ生成手段37、検知画像生成手段38が生成する画像を用いて障害物を検知する。移動機械は、検知結果を基に障害物との衝突を回避しつつ自律的に移動する。
(もっと読む)
追尾方法、追尾装置、追尾システム及び追尾プログラム
【課題】 追尾対象物と追尾装置との間が遮られても良好な追尾を実現する。
【解決手段】 姿勢センサ装置100には姿勢センサ101が設けられ、この姿勢情報が姿勢情報処理装置102に供給されて絶対位置情報の検出が行われる。また、時刻タイマ105及び個人認証IDコード記憶部106からの時刻情報及びID情報が姿勢情報処理装置102に供給される。そしてこれらの絶対位置情報、時刻情報及びID情報が無線送受信機107を通じて追尾装置200に送信される。さらに追尾装置200には姿勢センサ201が設けられると共に、制御装置202が設けられる。そして無線送受信機205で姿勢センサ装置100からの各情報が受信される。また、追尾装置200には車輪を駆動するためのモータ206、207が設けられ、制御装置202からの制御信号がモータドライバ208、209に供給されてモータ206、207の回転が制御される。
(もっと読む)
店舗ロボット
【課題】 スーパーマーケット等の店舗において買い物客による商品購入の利便性を向上させることのできる店舗ロボットを提供する。
【解決手段】 本発明の店舗ロボット1は、商品を収容するカゴ2と、このカゴを自立走行駆動させる移動手段6と、カゴ周囲の障害物を検出する障害物センサー5と、カゴの使用者を認識すると共に、使用者との距離を算出する使用者認識手段4とを有し、使用者認識手段によって算出された距離に基づいて、使用者に追従するよう移動する。
(もっと読む)
移動機器
【課題】移動機器の姿勢変動に影響を受けずに移動機器の周囲に存在する障害物の状況をはじめとする外部環境を確実に検知する。
【解決手段】移動機器の周囲に存在する障害物を検知する障害物検知センサー6を揺動可能なステージ11に設置し、このステージ11を揺動させて障害物検知センサー6のピッチング方向の姿勢を制御するアクチュエータ7を設けることで、障害物検出センサー6の揺動方向の姿勢を、移動機器本体1の揺動方向の姿勢と分離して独立に制御できるようにしたことにより、障害物検知センサー6の姿勢を移動機器本体の姿勢変動に影響を受けずに望ましい姿勢に保つことができ、外部環境を確実に検知することが可能となる。
(もっと読む)
自律移動装置、並びに物体及び自己位置検出システム
【課題】自律移動装置において、自律移動装置が移動する環境に置かれた物体の位置や形状及び自律移動装置の自己位置の認識を精度が高く、簡単な構成で安価に実現すること。
【解決手段】自律移動装置1は、自律移動装置以外の物体が存在する環境の中で自律的に移動するように用いられ、物体及び自己位置検出システム6と移動手段4とを備える。物体及び自己位置検出システム6は、環境の中に設置した物体の表面形状や位置の情報を記録したデータベース21と、位置測定手段3で取得された物体の表面形状とデータベース21に記憶された物体の表面形状とを照合し、その照合が一致した場合にデータベース21に記憶された物体の情報を走行計画手段23へ送信すると共に、その照合が不一致の場合に位置測定手段3で取得された物体の情報を走行計画手段23へ送信する照合手段20と、照合手段20から送信された物体の情報に基づいて自律移動装置1の走行経路を計画する走行計画手段23とを備える。
(もっと読む)
車両駐車装置及び車両駐車方法
【課題】簡素な装置構成によって駐車目標位置に車両を駐車させる。
【解決手段】制御部8が、車両の駐車目標位置と、車両の駐車目標位置から運転者の降車位置までの間の車両の走行軌跡とをそれぞれ駐車位置記憶部3及び走行軌跡記憶部4に記憶し、リモートコントローラ9から制御信号を受信した際、記憶されている走行軌跡に沿って車両を駐車目標位置に移動させる。これにより、複雑な演算処理を行う必要性が無くなり、演算負荷を低減させることができるので、簡素な装置構成によって駐車目標位置に車両を駐車させることができる。
(もっと読む)
801 - 820 / 867
[ Back to top ]