
Fターム[5H301AA10]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の可動空間、領域、経路 (2,962) | 所定の空間、領域を自由に移動可能なもの (867)
Fターム[5H301AA10]に分類される特許
841 - 860 / 867
自走式作業ロボット
【課題】 いずれの方向から障害物に接触した場合にも適切、かつ、迅速に対応可能な自走式作業ロボットを提供する。
【解決手段】 床面を自走する走行アセンブリ1と、床に対する作業を行う作業アセンブリ2とを備えた自走式作業ロボットに関する。前記作業アセンブリ2の前面に障害物が接触したのを検知する第1の接触センサと、作業アセンブリ2の側面に障害物が接触したのを検知する第2の接触センサを設け、第1の接触センサの検知信号に基づいて、第1の退避速度で作業アセンブリ2を左右に移動させ、第2の接触センサの検知信号に基づいて第1の退避速度よりも低速の第2の退避速度で作業アセンブリ2を左右に移動させる。
(もっと読む)
巡回ロボットおよび巡回方法

【課題】空間を構成するサブ空間のセキュリティ評価を行い、最適化した巡回経路で巡回する巡回ロボットおよび巡回方法を得る。
【解決手段】巡回動作中に、サブ空間停留時間率評価部5に対して、侵入リスクを動的パラメータと固定パラメータによって入力し、動的パラメータの変化を検出して、サブ空間での停留時間率の再計算を行う。再計算された停留時間率に基づき、経路プランを再プランニングし、実行する。
(もっと読む)
自走装置
【課題】 本体の移動中にバンパーが障害物に激しく衝突したとしても、衝突を検知するセンサーが破損することのない自走装置を提供する。
【解決手段】 本発明に係る自走装置は、床面上を自走するための自走機構を具えた本体と、本体の前面を覆って設置されたバンパー6と、バンパー6を弾性支持するバンパー支持機構と、本体とバンパー6との対向位置に設置されてバンパー6の内面により押圧されてオンとなるセンサーとしてのオン/オフスイッチ7と、該オン/オフスイッチ7を一定位置に支持するためのセンサー支持部50とを具えている。該センサー支持部50は、バンパー6から離間する方向に弾性変形可能な弾性支持アーム53を具え、バンパー6の内面がオン/オフスイッチ7に衝突したとき、該弾性支持アーム53が弾性変形して、オン/オフスイッチ7を後退させる。
(もっと読む)
自走式掃除装置
【課題】 超音波発生器と超音波感知器を用いて前方および左右両側の段差検出を行う自走式掃除装置において、部品点数の削減およびコストダウンを図ることにある。
【解決手段】 装置本体の底部に、床面の掃除を行う掃除手段22と、駆動輪14により装置本体10を床面に沿って移動させる走行手段とが設けられた自走式掃除機1である。そして、装置本体底部の前方位置に設けられた第1超音波デバイス31と、装置本体底部の左側に設けられた第2超音波デバイス32と、装置本体底部の右側に設けられた第3超音波デバイス33と、前記第2超音波デバイス32と前記第3超音波デバイス33との間に設けられた第4超音波デバイス34とを備え、第1超音波デバイス31と第4超音波デバイス34、第2超音波デバイス32と第4超音波デバイス34、第3超音波デバイス33と第4超音波デバイス34、がそれぞれ対になって超音波の送信と受信とを行うことで、装置本体10の前方範囲と左右両範囲の床面の状態を検出する構成とした。
(もっと読む)
無人搬送車の障害物検知装置
【課題】 長期にわたり安定した防水対策が確保できる主に屋外で使用される無人搬送車の障害物検知装置を提供する。
【解決手段】 外殻2aを有する無人搬送車本体2の前面外側にバンパ支持機構10によって移動可能に支持されたバンパ5を取り付け支持し、無人搬送車本体2の外殻2a内にバンパ5の移動を検知するリミットスイッチ88,98等のセンサを有する電気系統部分を収容する。防水対策が要求される電気系統部分が無人搬送車本体2の外殻2aで覆われて雨水等に晒されることがなくなり、屋外で使用される無人搬送車1において長期にわたり安定した防水対策が確保できると共に、電気系統部分専用の防水対策が不要になり、製造コストの低減及びメンテナンスの簡素化が可能となってメンテナンスコストが低減できる。
(もっと読む)
無人運転走行車両
【課題】任意の位置から自動走行開始位置へ自動で移動可能である。
【解決手段】測位システムを備え、運転者が乗車しないで自動走行する無人運転が可能な車両であり、自動走行コースの自動走行開始位置を設定する自動走行開始位置設定手段900と、自動走行開始位置を基点とする所定範囲を演算する所定範囲演算手段901と、現在の車両位置から走行開始位置までの走行経路を演算する走行経路演算手段902と、現在の車両位置が所定範囲内か否かを判断する判断手段903とを備える。
(もっと読む)
移動ロボット呼出装置及びその方法
【課題】 ロボット掃除機のような移動ロボットを使用者が直接持って所望の場所に移す必要なく、使用者が特定場所から移動ロボットを呼び出したとき、該移動ロボットが前記特定場所に自ら移動するようにすることで、使用者の便宜性を向上し得る移動ロボット呼出装置及びその方法を提供する。
【解決手段】 移動ロボット呼出装置は、遠隔制御機に設置され、使用者によって呼出信号が入力されると、移動ロボットを呼び出すためのRF信号及び赤外線信号を発生する発生部と、前記移動ロボットに設置され、前記RF信号が受信されたとき、前記赤外線信号を受信した赤外線受信器の位置に基づいて前記遠隔制御機の方向を計算し、該計算された方向に前記移動ロボットを回転させた後、前記移動ロボットを直進させる制御器と、を含んで構成される。
(もっと読む)
自律走行ロボット
【課題】 作業環境中に配置した標識を利用して、走行する経路によらず自己位置推定の誤差を補正できる自律走行ロボットを提供すること。
【解決手段】 本体を走行させる走行手段8a,8b,9a,9bと、作業環境中の本体位置を推定する自己位置推定手段22と、作業環境中の標識位置を記憶する地図記憶手段23と、作業領域中の標識を認識する標識認識手段3bと、壁に沿ってならい走行中に壁際に配置された標識を標識認識手段で認識した際に、前記地図中の本体位置に前記地図記憶手段に記憶されている標識位置を代入することにより自己位置推定の誤差を補正する誤差補正手段S4とを具備したことを特徴とする。
(もっと読む)
移動ロボット
【課題】ロボット本体ユニットに複数の車輪ユニットを取り付けて走行面上を移動及び/又は旋回する移動ロボットにおいて、簡単な構造で人体を検出する。
【解決手段】ロボット本体ユニット20に複数の車輪ユニット51〜53を取り付けて走行面2上を移動及び/又は旋回する移動ロボット1において、ロボット本体ユニット20の全周囲に亘って人体の有無を検出する第1のセンサ(焦電型赤外線センサ)27と、人体を検出した時に人体の方向を特定する第2のセンサ(サーモパイル)28と、人体までの距離を測定する第3のセンサ(距離センサ)22とをロボット筐体21に取り付けたことを特徴とする移動ロボット1を提供する。
(もっと読む)
距離測定装置および自律走行装置
【課題】検知範囲を広げるために所定の視野角θを有する距離測定手段を可動させることで可動部の複雑化や、障害物を乗り越える際の衝撃による動作の不安定性があり、また距離測定手段そのものを多数配置する必要があり、その制御が複雑かつ高価であった。
【解決手段】超音波を送信及び受信する複数の超音波振動子2,3と、送信用超音波振動子2を駆動する駆動手段4cと超音波を水平方向の全方位に反射させる全方位反射手段4aから構成される送信手段4と、前記送信手段4から送信された超音波が障害物で反射した超音波を受信するまでの時間を計時する計時手段6と、前記計時手段6が計時した時間から前記被測定物までの距離を算出する距離算出手段7とで構成され、広範囲に超音波を送信し広い範囲の障害物を検知できる距離測定装置とすることができる。
(もっと読む)
自律走行移動体
【課題】 走行空間内の壁際や隅についても探索走行ができ、自律走行移動体を用いて作業を行うことができるとともに、走行空間内を探索移動するために必要な検知手段や検出手段の数をできるだけ減らし、小型化することが可能な自律走行移動体を提供することである。
【解決手段】 自律走行移動体1は、移動体本体10と、移動体本体10を走行させる駆動輪12と駆動モータ14と、駆動モータ14を制御する制御部20と、移動体本体10を走行させるための走行情報が入力され、かつ、入力された走行情報に基づいて駆動モータ14を制御するための制御情報を制御部20に与える操作ユニット50とを備える。
(もっと読む)
移動体の自己位置特定方法
【課題】GPSを使用できずしかも地図を入手し難い場所であったとしても、高精度で移動体の自己位置を特定することができ、例えば、ビルで火災が発生した場合に、災害地点までの高精度マップを作成可能な移動体の自己位置特定方法を提供する。
【解決手段】自走可能な移動体1の移動開始地点の慣性座標系も位置を決定して、これを中心にした局所慣性座標を定義する。移動体1に搭載したCCDカメラ3の画像から第1の目標L1を選定し、第1の目標L1までの距離をレーザ測距装置4で測定し且つ角度センサ6で第1の目標L1の方向を特定して、第1の目標L1の局所慣性座標を求めた後、第1の目標L1を基準にして移動体1を移動させ、適宜位置で且つ第1の目標を基準にして特定した最後の自己位置でCCDカメラ3の画像から第2の目標L2を選定し、以降、移動体1を移動させる毎に逐次更新した新しい目標を基準にして移動体1の自己位置を求める。
(もっと読む)
自律走行装置とそのプログラムおよび記録媒体
【課題】使用者のノウハウを機器の制御に具現化した、より一層、信頼性の高い最適制御を行うことができる自律走行装置を提供することを目的とする。
【解決手段】機器の状態を状態図として記憶する状態図記憶手段22と、機器の状態を検知する複数のセンサ10、13、19と、各センサのセンサ値を状態図記憶手段22の状態図に射影できるようにマップ計算結果として出力する自己組織化マップ計算手段21と、自己組織化マップ計算手段21によるマップ計算結果と状態図記憶手段22が記憶する状態図とから機器の制御信号を決定する状態図制御手段23とを有する。これにより、マップ計算結果と記憶する状態図との位置関係から機器の状態を把握し、その情報に基づいて機器の制御信号を決定するので、使用者のノウハウを機器の制御に具現化した、より一層、信頼性の高い最適制御を行うことができるものである。
(もっと読む)
自走ロボット
【課題】 安価な構成で人体を追尾し撮像する。
【解決手段】 自走ロボット110は、第1センサ112〜第4センサ118と、カメラ130と、第1センサ112〜第4センサ118およびカメラ130を同時に移動させる駆動装置162と、第1センサ112〜第4センサ118およびカメラ130が停止したことを検出するロータリエンコーダ164と、熱源があることを第1センサ112〜第4センサ118のいずれか1つが検出すると、熱源を検出したセンサがあった方向にカメラ130が向くように、駆動装置162を制御し、停止後ものを撮像するように、カメラ130を制御し、停止後3秒が経過するまで、熱源を検出するか否かに関わらず、第1センサ112〜第4センサ118を固定するように駆動装置162を制御する制御部126とを含む。
(もっと読む)
障害物検出装置および障害物検出方法
【課題】最小限の検出手段を用いて確実に障害物を検出することのできる障害物検出装置および障害物検出方法を提供することを目的とする。
【解決手段】障害物直線距離検出器102は、動輪付台車101の移動方向に向かって左側に配設され、一方、障害物直線距離検出器103は、障害物直線距離検出器102に対し動輪付台車101の移動方向に向かって右側に位置するように配設されている。障害物直線距離検出器102の右側障害物検出領域152の検出軸152Aと、障害物直線距離検出器103の左側障害物検出領域151の検出軸151Aとを交差させるようにして、障害物を検出(障害物までの距離を測定)する。このため、障害物直線距離検出器102,103の検出精度を損なうことなく、2つの障害物直線距離検出器を用いて、確実に障害物までの距離を測定することができる。
(もっと読む)
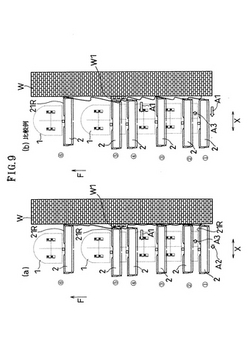
移動作業機の自動化構造
【課題】 高い処理能力を要することなく、高い精度で高速化に対応できる移動作業機の自動化構造を提供する。
【解決手段】 移動作業機1の位置を検出する位置検出手段3と、移動作業機1の作動を制御する制御手段49とを備え、移動作業機1の作業領域A0に複数の制御領域A1〜A8を設定するとともに、各制御領域A1〜A8に対応する複数の制御プログラムを備え、制御手段49が、位置検出手段4の検出に基づいて移動作業機1の各制御領域A1〜A8への到達を検知するのに伴って、到達した制御領域A1〜A8に対応する制御プログラムを実行して移動作業機1の作動を制御するように構成した。
(もっと読む)
自走式掃除機
【課題】多くのセンサ類を必要としていたため、高コストであった。
【解決手段】一つの撮像素子61cの前方に二軸の光学系61a,61bを配置し、同撮像素子61cについては画素群を略中央で左右に二つの撮像領域61c1,61c2に分けた、任意の撮像対象についてずれが生じている二つの画像を取得可能なカメラ61を備えることで、清掃走行時においては障害物の検出が可能となり、セキュリティモード時においては人体検知と同検知した人体の撮像が可能となるため、障害検出や人体検出のために専用の各種センサを備えていた従来と比較して、何ら機能を低下させることなく、生産コストを大幅に抑制することができる。
(もっと読む)
自律走行ロボット
【課題】作業領域別に異なる作業内容が指示でき、1つの作業領域に複数の作業内容が指示でき、しかも、作業内容を指定して所定の作業位置へ自律走行ができる。
【解決手段】赤外線信号を赤外線受信器4が受信すると、受信信号を解析し、走行コマンドであることを認識すると、走行コマンドに応じた走行制御を行う。そして、自己位置計測手段が逐次自己位置を計測する。登録コマンドが作業位置の登録コマンドであることを判断すると、自己位置計測手段が取得した現在の自己位置を作業位置情報として位置情報記憶手段により記憶部へ記憶する。また、作業内容の登録コマンドを受信したことを認識すると、登録コマンドに該当する作業内容を作業内容記憶手段により記憶部に記憶する。記憶部に登録した作業内容を選択すると、この選択した作業内容に対応した作業位置情報に基づいて所定の位置に案内し、この位置にて登録した作業内容を実行する。
(もっと読む)
自走式機器およびそのプログラム
【課題】移動目的点の位置に変更が生じても新たな移動目的点に到達することができる自走式機器を提供することを目的とする。
【解決手段】移動目的点位置受信手段9により走行中に移動目的点の位置を受信し、移動目的点の位置に変更が生じたときに、走行経路計画手段14で走行経路を再計画して走行するようにしたものである。これにより、走行中に移動目的点の位置を受信し走行経路を再計画することで、移動目的点の位置に変更が生じても新たな移動目的点に到達することができる。
(もっと読む)
浮遊体の誘導装置および方法
【課題】 ロボットに実質的に追従して移動し、前記ロボットの誘導に使用される俯瞰映像の撮影などを行う浮遊体を誘導するための構成を、簡単に実現する。
【解決手段】 無線通信を利用して浮遊体11を誘導する場合には、ロボット21との互いの位置関係を認識する手段や無線通信手段など、複雑な構成が必要になるのに対して、本発明では、ロボット21に、上方に予め定めるビーム幅Wで光束を放射する光放射手段22を搭載し、浮遊体11側に設けた3つ以上の受光素子によるその光束の受光具合によって、該浮遊体11側に設けた移動制御手段が、相互に逆方向に回転する回転翼や前後左右への移動を実現するためにその迎角を変化する機構およびそれらの駆動制御手段を備えて成る移動機構を制御する。したがって、光束が各受光素子に入射するか否かから移動機構を制御するだけでよく、浮遊体11に搭載可能な簡単な構成で実現することができる。
(もっと読む)
841 - 860 / 867
[ Back to top ]