
Fターム[5H301AA10]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の可動空間、領域、経路 (2,962) | 所定の空間、領域を自由に移動可能なもの (867)
Fターム[5H301AA10]に分類される特許
761 - 780 / 867
ネットワーク基盤のロボット制御システム及びネットワーク基盤のロボット制御システムにおけるロボット速度の制御方法
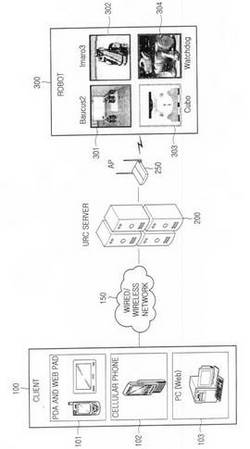
【課題】ネットワーク基盤のロボット制御システム及びネットワーク基盤のロボット制御システムにおけるロボット速度の制御方法を提供すること。
【解決手段】クライアントが上記ロボットにより撮影された映像データフレームの受信状態に応じてロボットの制御速度を計算し、計算されたロボットの制御速度を含むロボット制御メッセージを生成してロボットに送ることで、ロボットに、ロボット制御メッセージに含まれているロボット制御速度に応じて速度を変更させる。これにより、クライアントの映像データの受信状態に応じてロボットの速度を制御することから、ユーザーにクライアントの性能とは無関係に円滑にロボットの制御を行わせる。
(もっと読む)
自律型ロボット

【課題】未知の形状の領域に対して効率的な処理アルゴリズムを得る。
【解決手段】移動ロボットのためのコントロールシステムが設けられ、複数モードで動作し、所定エリアを効率的にカバーする。複数のモードには、障害物追従モード、ランダムバウンスモードが含まれる。他の実施例においては、螺旋状のようなスポットカバーレッジ、又は、その他のモードが効率を向上させるために使われる。更に、前記コントロールシステムを実行するために行動(behavior)に基づく構成が使われる。又、種々のエスケープ行動がフルカバレッジにするために使用される。
(もっと読む)
移動装置
【課題】 本発明は移動装置の一例である自律移動式清掃機の機構を簡単にし、コンパクトで安価な装置を提供することを目的としている。
【解決手段】上記目的を達成するために本発明の一例である自律移動式清掃機1は前後進用車輪9および前後進用車輪10、非円形状車輪14、センサー、制御系で構成されており前後進用電気モータ7で前後進移動用車輪9を駆動し前後方向に移動する。このとき所望の移動経路からのズレを前後進用車輪9に取り付けられたロータリーエンコーダーからの信号を基に計算し、所望の経路からのズレをなくすように前後進用電気モータ7の回転数を制御する。移動中は塵をこぼさないように適切なモップを接地させてゴミを集める。超音波距離計5が壁を感知すると今度は非円形状車輪14を駆動して横方向に移動する。この後再び前後進用車輪9を駆動し今度は後退する。以上の動作を繰り返しつつ設定された回数だけ横方向に移動すれば作業終了となる。
(もっと読む)
自律走行ロボットの位置認識システム
【課題】ロボットの位置を正確に制御し得る自律走行ロボットの位置認識システムを提供する。
【解決手段】本発明に係る自律走行ロボットの位置認識システムにおいては、磁石が挿入された床と、該床上を自律走行しながら磁石を感知し得るマグネットセンサが備えられた自律走行ロボットと、を含むことを特徴とする。
(もっと読む)
自走式ロボット
【課題】 自走式ロボットの周囲の障害物を正確に検出する。
【解決手段】 進行方向V1に対して、超音波発信器s2を中心として、等間隔に、3台の超音波発信器と4台の超音波受信器とが交互に配設されている。ここでは、進行方向V1に向かって左側から、超音波受信器r1、超音波発信器s1、超音波受信器r2、超音波発信器s2、超音波受信器r3、超音波発信器s3、超音波受信器r4の順に配設されている。また、本体部10の中心点Oを通り、進行方向V1に平行な直線である中心線LSについて、3台の超音波発信器と4台の超音波受信器とが線対称な位置に配設されている。
(もっと読む)
自律型ロボット用マルチモード処理方法及びシステム
【課題】所与の領域を効率的に処理する移動ロボットの制御システムを提供する。
【解決手段】 障害物追従モード51及びランダム反跳モード48を含む複数のモードで動作することにより移動する。他の実施形態では、効率を向上させるために、螺旋運動45のようなスポット処理モードや他のモードが併用されている。さらに、制御システムを実施するため行動ベースの構成が用いられ、完全な処理範囲を保証するために様々な脱出行動が用いられる。
(もっと読む)
自走式掃除ロボット、自走式ロボットおよび自走式ロボットの走行を制御するためのプログラム
【課題】 直進走行の性能を向上させることのできる自走式掃除ロボット、自走式ロボットおよび自走式ロボットの走行を制御するためのプログラムを提供すること。
【解決手段】 予め定められた走行パターンで走行する自走式ロボットであって、基準位置からの進行方向である角度を検出するためのジャイロセンサ28と、基準位置からの走行距離を検出するための左ロータリエンコーダ22,右ロータリエンコーダ23と、本体を移動させるための左右の駆動輪と、左右の駆動輪を駆動して走行させるための左駆動輪モータ60,右駆動輪モータ61とを備える。CPU10は、走行バターンが計画路線に従い走行する直進走行パターンである場合に、ジャイロセンサ28および左ロータリエンコーダ22,右ロータリエンコーダ23からの検出量に基づいて、計画路線からのずれ量を算出し、算出されたずれ量に基づいて左駆動輪モータ60,右駆動輪モータ61の駆動を制御する。
(もっと読む)
車両
【課題】倒立振り子の姿勢制御を利用した車両において、バランサの移動により車両の姿勢を動的に制御する。
【解決手段】 ジャイロセンサで車体の傾斜を検出し、その角加速度から、搭乗部の傾斜に対するトルクT1を算出し、そのトルクを打ち消して傾斜方向と反対の方向に搭乗部を戻すためのトルクT2をバランサの移動により発生させる。すなわち、バランサを搭乗部の傾斜方向にトルクT2(>T1)で駆動することにより、トルクT2に対する反力トルクT3を搭乗部作用させる。この反力トルクT3により、搭乗部は最初に傾斜した方向と反対方向に押し戻される。搭乗部が反対方向に押し戻されることで、鉛直線に対する反対側に搭乗部が傾斜した際の角加速度をジャイロセンサで検出し、その角加速度に対応したトルクT2でバランサを反対方向に再度移動する。
(もっと読む)
自走式ロボット
【課題】 自走式ロボットを、所定の領域内で略均一に走行させる。
【解決手段】 CPU171は、機能的に、本体部10が壁面(又は、障害物)と離間している距離である離間距離を検出する検出部171aと、壁面(又は、障害物)に沿って走行させる制御モードである壁沿いモード(第1モードに相当する)での走行をさせる壁沿い走行部171bと、室内を直進と回転とを繰り返して走行させる制御モードであるランダムモードでの走行をさせるランダム走行部171cと、壁沿いモードとランダムモードとを切り換える切換部171eとを備え、切換部171eは、3回分の直進走行時間が所定の条件を満たす場合に、ランダムモードを壁沿いモードへ切り換える。
(もっと読む)
自律走行車及びその制御方法
【課題】現場に固定された検出対象物を検出することにより基準方位を読み取ってジャイロセンサの基準方位の設定を行う自律走行車において、検出対象物の設置を容易にし、正確な走行制御を行う。
【解決手段】現場に仮想として配置されるXY座標上の点として特定されている2点以上の位置にそれぞれ固定された検出対象物(リフレクタR1〜R4)をレーザ・スキャナ44によって検出して得られた情報に基づき、XY座標上の自車の方向αを算出する。これを走行ルート始点5等において行い、自車の方向αに基づきジャイロセンサの基準方位を設定する。ジャイロセンサの検出信号に基づき走行ルート4に沿った走行を制御し、リフレクタの設置数は極力少数に抑えた。
(もっと読む)
車両誘導システム、自律移動車両
【課題】 車両誘導システムにおいて、平面内で車両を無人走行させるときに、車両の自己位置を特定する必要がある。
【解決手段】 指標装置10は、交差するように配置された細長形状のコイル12、14と、コイルに電流を供給する電源18を含む。この指標装置10は、自律移動車両20の無人走行開始位置に設けられる。自律移動車両20は、コイル12、14から発生する磁束を検出する磁気センサ26と、磁気センサ26の初期位置からの回転角を検出するジャイロセンサ30とを備える。自律移動車両20は、走行開始前にコイル12、14の交点付近で一回転する。制御部28は、この一回転の間に磁気センサ26がコイル12、14の上方を通過したときの回転角を記録し、これら回転角に基づいて、自律移動車両20の位置および方位を特定する。
(もっと読む)
走行ロボットの位置感知装置及びこれを備えたロボット掃除機
【課題】走行ロボットの位置感知装置に係り、特に、走行における障害物との距離を感知する上で、外部の妨害光線が障害物として誤認されることを防止しうる走行ロボットの位置感知装置及びこれを備えたロボット掃除機を提供する。
【解決手段】走行ロボットの位置感知装置は、光を反射させた障害物との距離に従って異なる位置に光を結像させるように構成された受光素子と、障害物から反射されて前記受光素子に入射する光を、直進するように放出させ、前記受光素子に入射される外部の妨害光線による虚像の障害物が前記有効感知範囲外に位置するようにその妨害光線に対して角度を与えて光を放出する発光素子と、前記受光素子に入射した光の結像位置から前記障害物との距離を演算する信号処理装置と、前記位置感知装置で感知された距離の走行時変化を考慮してその距離に障害物が存在するかを判断する誤信号処理装置と、を備える。
(もっと読む)
作業ロボット
【課題】人との接触防止を確実にするとともに、壁際ギリギリまでの作業を可能にし、作業性能の向上を実現する作業ロボットを提供する。
【解決手段】障害物までの距離を測定する距離測定手段と、障害物が移動物体か静止物体かを判別する判別手段と、走行を停止すべき障害物までの距離の閾値Dxを算出する閾値算出手段と、前記距離測定手段により測定された距離計測値Mi が前記閾値Dxに達した時に走行を停止させる走行制御手段と、を備え、前記閾値算出手段は前記判別手段による判別の結果に基づいて、障害物が移動物体であると判別された場合に前記閾値Dxを減少させ、一方、障害物が静止物体であると判別された場合に前記閾値Dxを増大させて、前記閾値Dxを算出することを特徴とする。
(もっと読む)
粒子の衝突回避の予約方法および装置
【課題】従来の衝突回避方法には、▲1▼衝突判断や評価方法が曖昧、▲2▼対象を単独または少数に限って個別に扱うため多数の対象と同時に衝突回避できない、▲3▼側方や後方、障害物の陰、上下から接近する対象を無視している、▲4▼相手の速度や重量など、物理的情報を想定または無視しているなどの問題がある。また、▲5▼操縦者に警告するのみで過大な責任を求めたり、逆に、操縦感覚と無関係に自動減速・停止するなど、操縦者の存在が軽視されている。
【解決手段】車両などと対象を粒子群で表し、運動状態に比例して安全に制動および回転可能な3次元的な空間を粒子に与え、この空間と相手粒子との仮想衝突計算を3次元仮想空間で行い、仮想衝突反力を自らにのみ加えて制動および回転行動を取るよう粒子運動を制御する方法と、制御信号を制御系と操縦系に与える中間力覚制御により、機械系と操縦者の双方を制御しながら常時・動的に衝突を回避するシステム。
(もっと読む)
自律走行体システム
【課題】複数の距離センサの校正を自律走行体の向きを変えずに短時間で行う。
【解決手段】バッテリー及びこのバッテリーの充電用受電端子10aを設けた略円形の自律走行体1と、この自律走行体の受電端子と接触する充電用送電端子37aを設け、この送電端子から送電してバッテリーを充電する充電台31とからなり、充電台は、前部が略半円形状の側壁体36と、側壁体の壁面から校正に必要な所定距離だけ離れるように駆動輪3a,3bの位置決めを行う凹部35a,35bとを設け、自律走行体1は、複数の超音波送信部5a〜9aと、複数の超音波受信部5b〜9bと、送信部からの超音波パルスが側壁体に反射して超音波受信部が受信するまでの時間を計時する第1の計時手段53と、この計時手段の計時情報に基づいて算出した距離x0と設定された距離xとのズレを校正する第1の校正手段54を設けている。
(もっと読む)
ロボット装置、ロボット装置の移動方法、および、プログラム
【課題】 ユーザからの指示に応じて、適切な移動方法で移動を行うロボット装置の提供。
【解決手段】 自律的に動作を行うロボット装置は、自装置の移動を行う移動部4と、目標物の位置情報を定期的に取得する目標物位置取得部38とを備える。移動方法判断・指示部35は、ユーザから移動に係る指示を入力し、移動先を固定の位置情報で指定できるものであるか否かを判断し、指定できると判断した場合には、位置移動制御部36による制御を行い、指定できないと判断した場合には、目標物位置取得部38から定期的に位置情報を取得する追跡移動制御部37による制御を行って、移動部4を動作させる。
(もっと読む)
生活支援システム及びその制御用プログラム
生活支援システム(100)は、物品に関する情報を実環境に直接表示可能な情報提示装置(124)と、ロボット(102)の移動領域を生成する移動領域生成手段(125)と、ロボット(102)の把持可能領域を生成する把持可能領域生成手段(126)と、利用者から物品までの誘導情報を計算する誘導情報生成手段(127)とを備えている。生活支援システム(100)は、移動領域生成手段(125)と把持可能領域生成手段(126)と誘導情報生成手段(127)とで求まった情報を、情報提示装置(124)で表示する。これにより、家屋等の物品等を管理すると共に、該物品の属性情報あるいは物品の円滑移動のための情報等を、利用者に対してより直感的に提示する生活支援システムを提供する。  (もっと読む)
(もっと読む)
充電式走行システム
【課題】 コストの高騰を抑制しつつ確実に自動充電を行うことが可能な充電式走行システムの提供を課題とする。
【解決手段】 充電装置100の本体部101と給電部102とに、それぞれ赤外線の反射率の異なる色(黒色形成部BK、白色形成部WT)が形成されており、これにより、前横壁センサ36F(36FRまたは36FL)のセンサ出力値が変化することを利用して給電部102の幅を計測し、この計測結果が予め記憶されている給電部102の幅(w)と一致した場合には、充電を行うべき充電装置100であると判定するように構成されているため、充電装置100側に特別な装置を設ける必要がなくなるとともに、確実に充電装置を発見し、自動充電を行うことが可能となる。
(もっと読む)
移動体用の障害物検出装置
【課題】姿勢安定装置のような機構を不要とし、かつハフ変換に比較して処理負荷を軽減することができる移動体用の障害物検出装置を提供する。
【解決手段】距離画像センサ11は、移動体本体2に搭載され移動体本体2が走行しようとする面を含む空間領域を斜め下向きに撮像する。基準画像記憶部15には、移動体本体2が平面上を走行する際に距離画像センサ11で生成されることが予測される角度範囲内の平面の距離画像が所定の刻み幅で候補基準画像として格納される。差分画像生成部12は、基準画像記憶部15に格納された複数の候補基準画像のうち距離画像センサ11で生成された距離画像との差分画像を生成し、基準距離画像選択部13は、差分画像において一致領域の面積が最大になる候補基準画像を基準距離画像として選択する。判断部14は、この基準距離画像に対する差分画像の一致領域以外を障害物が存在する領域とする。
(もっと読む)
障害物検出装置
【課題】距離画像を用いて走行可能な経路か衝突を回避しなければならない障害物かを判別し、しかも処理負荷が小さく高速な処理を可能な障害物検出装置を提供する。
【解決手段】距離画像センサ11は、自律移動装置2が走行しようとする面を含む空間領域を斜め下向きに撮像し画素値が距離値である距離画像を生成する。差分画像生成部13は、距離画像センサ11で得られた距離画像と基準面の距離画像との差分画像を生成する。さらに、高さ画像生成部14は、差分画像のうち差分値が規定の距離閾値以上である領域について距離画像を基準面に投影し基準面からの高さ値を画素値とした高さ画像を生成する。第1および第2の2値化部15a,15bは高さ画像を2段階の閾値で2値化し、2つの2値画像を生成する。判断部16は、各2値画像において基準面からの高さ値が閾値以上である領域の面積を比較することにより障害物か否かを判断する。
(もっと読む)
761 - 780 / 867
[ Back to top ]