
Fターム[5H301BB11]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 用途、移動体の種類 (1,798) | 掃除機 (242)
Fターム[5H301BB11]に分類される特許
1 - 20 / 242
ロボット掃除機及びその制御方法
【課題】ロボット掃除機及びその制御方法を提供する。
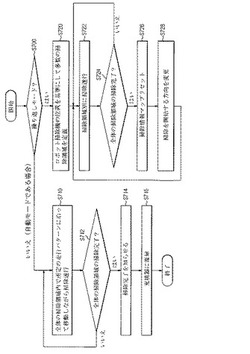
【解決手段】ロボット掃除機の制御方法は、第1の掃除モードに従って、前記ロボット掃除機の位置を基準にして多数の掃除領域を定義すること;及び定義された前記掃除領域別に順次掃除を行うこと;を含む。本発明のロボット掃除機及びその制御方法によると、繰り返しモードが開始され、ロボット掃除機の位置を基準にして多数の掃除領域を定義し、掃除領域別に順次掃除を行うとき、基準壁面の検出可否によってロボット掃除機が属した掃除領域を再設定し、再設定された掃除領域内で走行経路に沿って移動しながら掃除を行うので、掃除が1回も行われていない領域や掃除の重複領域を減少させることができる。また、掃除が1回も行われていない領域や掃除の重複領域を減少させることによって、ロボット掃除機の掃除効率を向上させることができる。
(もっと読む)
ロボット清掃機及びその制御方法

【課題】走行経路上で障害物が感知されても、それがロボット掃除機システムを構成する付加装置領域である場合は、補助掃除ユニットが突出しないように制御するロボット掃除機及びその制御方法を提供すること。
【解決手段】ロボット掃除機は、床を走行する本体、前記本体に近接する障害物を感知する障害物感知部、前記本体の下部に突出及び収納可能に装着された補助掃除ユニット、及び、前記障害物が感知されると、前記補助掃除ユニットが突出または収納されるように制御し、充電器領域を認知し、前記充電器領域では前記補助掃除ユニットが突出しないように制御する制御部を備える。
(もっと読む)
ロボット掃除機及びその制御方法
【課題】補助掃除ユニットの誤作動を検出し、該検出結果に基づいてロボット掃除機の走行を制御し、補助掃除ユニットに誤作動が発生した場合にも隅部分を効率的に掃除できるロボット掃除機及びその制御方法を提供する。
【解決手段】このロボット掃除機は、前記ロボット掃除機の下部に突出及び収納可能に装着される補助掃除ユニット100と、前記補助掃除ユニットの突出、収納または回転状態を感知する感知部300と、前記感知部の感知結果に基づいて前記補助掃除ユニットが正常に動作するか否かを判断し、前記判断結果に基づいて前記ロボット掃除機の走行を制御する制御部200と、を備える。
(もっと読む)
掃除ロボット
【課題】ユーザーが所望する任意の位置まで容易に誘導することができ、効率がより高い掃除運転を遂行することが可能な掃除ロボットを提供する。
【解決手段】掃除ロボット1は吸込口6と排気口7とを開口して床面上を自走する本体筐体2と、本体筐体2内に配置した電動送風機22と、電動送風機22の駆動によって吸込口6から吸い込まれた気流の塵埃を集塵する集塵部30と、赤外線を発することにより本体筐体2の設置空間の任意の位置を指定する赤外線リモコン60と、赤外線リモコン60によって指定された指示位置を検知する赤外線センサー18と、を備え、赤外線センサー18が検知した指示位置まで移動して及び/または指示位置までの移動中に掃除運転を実行する。
(もっと読む)
ロボット掃除機及びその制御方法
【課題】掃除領域の床面の材質または状態に応じて効率よく掃除作業を行うことができるように改善された構造を有するロボット掃除機及びその制御方法を提供する。
【解決手段】ロボット掃除機は、本体と、本体を駆動する駆動輪と、駆動輪を有する駆動輪組立体と、制御部と、を備える。制御部は、被感知体を感知して、基準位置に対する駆動輪の変位を検出し、駆動輪の変位によって床面の材質または状態を判断し、判断された床面の材質または状態によってロボット掃除機の走行を制御する。
(もっと読む)
環境地図を用いた掃除ロボット
【課題】簡単に操作でき、自動的に環境内を掃除する掃除ロボットを提供する。
【解決手段】本発明は、コンピュータ18により駆動制御する走行制御部34と、車輪センサ36と、環境との接触を検出する接触センサ38を有し、環境を掃除する掃除ロボットにおいて、環境地図を保存する環境地図記憶部25と、オドメトリ情報から得られるロボット座標を保存するロボット座標記憶部21と、多数のパーティクルの座標を保存するパーティクル座標記憶部22と、前記環境地図とパーティクル軌道を保存するパーティクル掃引地図記憶部23と、前記多数のパーティクルの尤度を演算して最適軌道を導出する最適軌道導出手段と、前記最適軌道を前記掃除ロボットの軌道として保存するロボット掃引地図記憶部23と、小尤度のパーティクルを消去するリサンプリング手段と、前記掃除ロボット及び前記パーティクルを回転反射させる反射手段を有する掃除ロボットである。
(もっと読む)
ロボット本体の嵌まり込みを防止する移動ロボット及び移動ロボット制御方法
【課題】 隙間に嵌まり込まれることを判別し、このような嵌まり込み状態から容易に脱出できる移動ロボットと、隙間を有する障害物の境界線を推定して移動する移動ロボット制御方法を提供する。
【解決手段】 移動ロボットは、ロボット本体の上部に付着されて移動ロボットの嵌まり込みを判別する嵌まり込み判別装置を有し、移動ロボットの上部に位置する障害物と衝突する接触部、接触部によって回転または直線運動をする接触作動部、接触作動部の回転または直線移動を感知して障害物の隙間への移動ロボットの嵌まり込みを認識する感知部、嵌まり込みを感知し本体を回転移動する駆動制御部を含む。
(もっと読む)
ロボット掃除機及びその制御方法
【課題】停止せずに走行方向を変更するために停止せずに掃除領域を掃除するのにかかる時間を減少させることができる、ロボット掃除機及びその制御方法に関する。
【解決手段】ロボット掃除機は、掃除領域を走行しながら確保した位置データに基づいて、掃除を行う区域を設定し、前記掃除を行う区域を掃除できるように掃除経路を予め設定し、前記掃除経路にジグザグ走行経路が含まれると、ジグザグ走行経路に沿って移動中に、曲線走行して方向を転換することによって、走行方向の転換時に、掃除領域を掃除するのにかかる時間を減少させることができる。
(もっと読む)
自動走行装置及びそのナビゲーション方法
【課題】吸引ロボット及び掃引ロボット等の床を掃除するための掃除装置であって1又は複数の光センサを具備する自動走行装置を提供する。
【解決手段】自動走行装置1が、前置増幅器と、位相敏感検波器と、中央制御部と、を有し、光センサ6、7、8により出力された信号が中央制御部により与えられた信号パターンと比較され、かつ、信号は、複数の光センサ6、7、8の構成における個々の光センサ6、7、8の方向とともに、又は、1つの光センサ6の角度方向とともに、自動走行装置1の制御に関係付けられる。
(もっと読む)
清掃ロボットの制御システムおよび制御方法
【課題】標示体を特定の領域に固定する必要がない掃除ロボットの制御システムおよび制御方法を提供する。
【解決手段】少なくとも1つの標示体と、当該標示体の位置を検出および記録して記録結果を生成し、かつ当該生成された記録結果をロック(lock)するロック機能を備える清掃ロボットとを含む清掃ロボットの制御システムであって、当該ロック機能が起動されると、当該清掃ロボットは当該記録結果に基づいて清掃動作を実行し、当該ロック機能が起動され、かつ当該標示体が取り除かれたとき、当該清掃ロボットは、当該標示体の取り除かれる前の位置に基づいて当該清掃動作を実行する。
(もっと読む)
電気掃除機
【課題】床面上の障害物へのサイドブラシの引っ掛かりにより走行不能となることを防止できる電気掃除機を提供する。
【解決手段】電気掃除機11は、床面Fに接地するブラシ毛32bを備えるサイドブラシ18を、本体ケース12の下部の吸込口の前方に旋回可能に有する。電気掃除機11は、本体ケース12よりも下方に自律走行の妨げとなる敷物Rがあるかどうかを検出する障害物検出手段21を有する。電気掃除機11は、本体ケース12よりも下方に自律走行の妨げとなる敷物Rがあることを障害物検出手段21により検出したときにサイドブラシ18を上方へと退避させる制御手段を有する。
(もっと読む)
汚れ検出手段を組み込んだ清掃走行経路ガイド方法
【課題】汚れ検出手段を組み込んだ清掃走行経路ガイド方法を提供することを課題とする。
【解決手段】汚れ検出手段を組み込んだ清掃走行経路ガイド方法であって、自動清掃装置で実行され、清掃経路を生成して自動清掃装置に未清掃領域の清掃をガイドするために用いられ、未清掃領域内で複数の格子を定義できる。該方法は、まず未清掃領域において自動清掃装置を移動させて汚れを清掃し、また、掃除したゴミ量を継続して検出することで、現位置格子の汚れ具合を取得する。現位置格子の汚れ具合が閾値を超えた時、格子を汚れ格子としてマークする。アルゴリズムを実行し、マークした汚れ格子に基づき、全ての汚れ格子を通過できる最短経路を探索して清掃経路とする。最後に、清掃経路に基づき自動清掃装置が移動して各汚れ格子を通過させ、順番通り各汚れ格子を清掃することである。
(もっと読む)
ロボットシステム
【課題】ネットワークデータブリッジおよび移動式ロボットを備えるロボットシステムが提供される。
【解決手段】ネットワークデータブリッジ202は、インターネットプロトコルネットワークに接続可能な広帯域ネットワークインターフェイスと、無線コマンドプロトコルネットワークに接続可能な無線コマンドインターフェイスと、広帯域ネットワークインターフェイス経由で受信するシリアルコマンドを抽出し、無線コマンドインターフェイス経由でブロードキャストするデータブリッジ構成要素と、を備える。また、移動式ロボット104は、ロボットを動かす駆動システムと、ネットワークデータブリッジから送信されるシリアルコマンドを受信する無線コマンド通信構成要素と、を備える。さらに、ネットワークデータブリッジは、製造者サーバおよび移動式ロボット間の通信のため、広帯域ネットワークインターフェイスを介して製造者サーバに接続可能である。
(もっと読む)
ロボットシステム
【課題】ロボットシステムの各構成要素のバッテリー寿命が全体的なシステムの操作性に影響を与える。
【解決手段】省電力ロボットシステム200は、移動式ロボット104および少なくとも1つの周辺装置のある環境下に置かれる、ネットワークデータブリッジ202を含む。ネットワークデータブリッジ202は、インターネットプロトコルネットワークに接続可能な広帯域ネットワークインターフェイス210と、無線コマンドプロトコルネットワークに接続可能な無線コマンドインターフェイス204と、該インターネットプロトコルから該広帯域ネットワークインターフェイス210を介して受信されるシリアルコマンドを抽出し、移動式ロボット104および周辺装置に受信されるように、狭帯域無線インターフェイスを介して該シリアルコマンドをブロードキャストするデータブリッジ構成要素202と、を備える。
(もっと読む)
自走式装置の位置の決定方法
【課題】電動駆動走行車(3)を有する自走式装置(1)の位置の決定方法を提供する。
【解決手段】装置(1)が障害物検出装置(A)を備え、さらに占有された予め計算された装置(1)の最初の位置からの多数の可能な位置および方位(パーティクル(小部分)6)が計算され、および装置(1)に対応した走行後の次に占有される第2の位置に関して、光学ユニットの測定結果に基づき確率を考慮した所定の選択アルゴリズムに従って、予め発生されたパーティクル(6)の1つが装置(1)の新たな位置として占有される自走式装置(1)の位置の決定方法である。
(もっと読む)
同時の位置決定およびマップ作成方法
【課題】自走式床集塵装置を自動位置決めするための演算負荷が少なくてすむ同時の位置決定およびマップ作成方法を提供する。
【解決手段】装置1が送/受光ユニットからなる障害物検出装置を備え、さらに占有された予め計算された装置の最初の位置からの多数の可能な位置および方位(パーティクル(小部分)6)が計算され、および装置1対応した走行後の次に占有される第2の位置に関し、光学ユニットの測定結果に基づき確率を考慮した所定の選択アルゴリズムに従って、予め発生されたパーティクル6の1つが装置1の新たな位置として占有される同時の位置決定およびマップ作成方法である。さらに改善するために前記パーティクル6の計算が装置1の所定の走行方向rおよび走行距離ないしは走行速度により決定される立体角αおよび間隔範囲aに関して制限される。
(もっと読む)
小型自律カバレッジロボット
【課題】筐体が長方形の前方部と半円形の後方部とを有し、清掃機構が壁の隅部または壁のへりに及ぶことによって、その長方形の部分が壁の隅部または壁のへりに接するように動くことができる自走式カバレッジロボットを提供する。
【解決手段】衝突に応じて、進行方向および進行方向と直角にまじわる方向に移動可能であるバンパーと、バンパー内に配置される近接センサと、バンパーの移動を検出する複数の衝突センサと、差動駆動される右および左駆動車輪を備える駆動システムと、駆動軸に平行な横軸に沿って配置されるフリーホイールと、ローラブラシを備える清掃アセンブリと、を備え、バンパーは、清掃アセンブリの3つの側面の周囲に配置され、清掃アセンブリは、フリーホイールの前方において、清掃面上で片持ち構造で保持され、近接センサと多方向衝突センサは、ロボットが駆動軸周りに回転する際に、筐体の側面に平行な壁を検出する構成とした。
(もっと読む)
移動型ロボット清掃機
【課題】効率的なカバレッジの処理ため、複数のモードで動作させることが可能な移動型ロボット清掃機を提供することを目的とする。
【解決手段】 移動型ロボット清掃機であって、円形のロボット本体を前進/回転させる駆動機構と、ロボット本体に接する障害物を検出する衝突センサと、ロボット本体の支配側の障害物を検出する追従センサと、床面の埃を収集する清掃ヘッドと、衝突センサと追従センサからの出力に基づいて駆動機構を制御するコントローラとを備え、該コントローラは、直線モードとバウンスモードを切り替えることができ、直線モードでは、衝突センサが障害物を検出するまでロボット本体を直線に沿って前進させ、バウンスモードでは、衝突センサが障害物を検出した場合に回転させて障害物から遠ざけ、その後、直線モードにて変更後の向きに前進させるよう制御する構成とした。
(もっと読む)
自走式装置
【課題】非接触作動および/または接触作動する、物体を検出するためのセンサ機構を備えた自走式装置で、吸込/掃除ロボットのような床を清掃しつつ異常事態にアラームを発生する。
【解決手段】好ましくは装置の個々の機能の相乗効果を利用して当該タイプの装置をさらに改良するために、物体の検出が、場合により、前記物体の運動または形状に関する、前記物体に関して記憶されているデータとの比較において偏差を有する(通常でない)と評価された前記物体の検出が、例えば音響アラームのためのトリガ(発生要因)として利用可能であり、またはこれに関する検査のために伝送可能であることが提案される。
(もっと読む)
自律型カバレッジロボット
【課題】移動中に遭遇する障害物を回避することが可能な自律型カバレッジロボットを提供することを目的とする。
【解決手段】自律カバレッジロボットであって、方位設定および速度設定に従ってロボットを操縦するように構成された駆動システムと、前方向における障害物とのロボットの衝突に応答する衝突センサと、ロボット前方における潜在的な障害物に応答する近接センサと、を備え、駆動システムは、方位設定に従ってロボットを前進させ続ける間に、潜在的な障害物の検出を示す近接センサからの信号に応答して、速度設定を低減するように構成され、駆動システムは、障害物との接触を示す衝突センサから、および障害物の周囲を追従し、障害物からロボットを離れるように向けるための近接センサから受け取った信号に応答して、方位設定を変更するように構成されることを特徴とする。
(もっと読む)
1 - 20 / 242
[ Back to top ]