
Fターム[5H301CC05]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 制御変量、指令内容 (1,997) | 移動体自体の位置、進路 (1,814) | 進路 (869)
Fターム[5H301CC05]の下位に属するFターム
Fターム[5H301CC05]に分類される特許
1 - 17 / 17
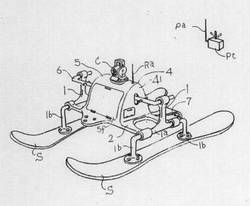
カメラ付スキーロボット
【課題】
赤外線対人検知式自動追尾型カメラを支持し、ラジオコントロール操作により、被写体スキーヤーと共に滑りながら、優れた映像を撮影することを可能とした、スキーロボットを提供する。
【解決手段】
駆動装置を内蔵する箱型のケース本体の底部には、先端が筒体となっている左右それぞれ2本の足を設け、スキー板の上面に固定されている棒状の門型支持具の水平部の棒体が前記筒体に回転自在に貫通し、該水平部の棒体の中央部から、頂部に筒部を形成する垂直支持体を垂設し、前記ケース本体の上方側面を貫通する貫通孔に貫通するコの字状の棒体が前記筒部に回転自在に嵌合し、前記ケース本体の上部に、赤外線対人検知式自動追尾型カメラを設けるとともに該ケース本体の後方部に先端が鋸刃状の鍬状体を設けてなるカメラ付スキーロボットとして課題を解決している。
(もっと読む)
搬送台車の舵取りシステム

【課題】簡易な搬送台車を対象とする有効適切な舵取りシステムを提供する。
【解決手段】任意方向に方向転換自在なキャスター2を有し、被搬送物を搭載して操作者3の後押し操作によって床面上を任意方向に移動可能とされた搬送台車(ストレッチャー1)を対象として、該搬送台車を予め定められた行先案内情報に基づいて所望の移動方向に案内するための舵取りシステムであって、搬送台車に行先案内情報を検出する検出器(センサ7)と、該検出器による検出結果に基づいて制御されて搬送台車を行先案内情報に沿って移動させる操舵輪6とを設ける。操舵輪を搬送台車の底部に格納自在に設ける。搬送台車の移動速度に応じて操舵輪を制御する。行先案内情報は床面に設けるライン8あるいは天井面に設ける画像マーカとする。補助駆動機構により後押し操作をパワーアシストするようにしても良い。
(もっと読む)
自走制御システムおよび自走制御方法
【課題】ユーザの相対位置の推定を行うことなく、ユーザに対する追従性能の向上が可能な自走システムを提供すること。
【解決手段】電波発信源を有するユーザの方向に対して自走する車両に搭載された自走制御システムにおいて、互いに重複する部分を有する所定の通信範囲をそれぞれ形成する複数の無線通信手段を備え、前記ユーザが、いずれの無線通信手段の通信範囲内に存在するかを推定し、その推定結果に基づき、車両の移動方向を決定することを特徴とする自走制御システム。
(もっと読む)
自律移動装置
【課題】 移動経路の経路余裕に応じた適切な走行制御を行うことが可能な自律移動装置を提供する。
【解決手段】 自律移動装置1は、オムニホイール13を駆動する電動モータ12と、電動モータ12の制御を司る電子制御装置30とを備えている。電子制御装置30は、障害物が存在する障害物領域が示されるグローバルマップを取得するグローバルマップ取得部31と、グローバルマップから移動経路を計画する経路計画部32と、移動経路の経路余裕を取得する経路余裕取得部33と、移動経路及び該移動経路の経路余裕を記憶する記憶部34とを備えている。また、電子制御装置30は、移動中の自己位置を検知する自己位置検知部35と、自己位置における経路余裕を記憶部34から取得するとともに、該自己位置における経路余裕に応じて電動モータ12を制御する走行制御部36とを備えている。
(もっと読む)
自立走行装置
【課題】外力Fを加えた方向に自立走行する自走車またはロボットを提供する。
【解決手段】フロア上を任意の方向に自立して走行する自立走行装置1は、走行機構部12と走行機構部12の上方に位置する走行本体部11と走行本体部11に加えられた荷重を測定する複数の荷重センサ13とを有し、走行機構部12は、駆動部15と、駆動部15を走行本体部11に対して全周施回可能に操舵する操舵部14とを有する走行ユニットを複数備えると共に、複数の荷重センサ13により検出された荷重から自立走行装置1の重心を求め、重心の変位を算出し、自立走行装置1が安定な状態を維持できるように操舵部14を制御する制御部10と、を有する。
(もっと読む)
移動体教示システム
【課題】 移動体を動かす事なく目標位置情報の教示が可能であり、また教示者が教示と同時に目標位置情報の確認および編集を容易に行う。
【解決手段】 教示装置は、ランドマークを計測するランドマーク計測部と、ランドマークの計測結果から環境内での教示装置位置を算出する位置算出部と、教示装置位置を教示者に提示する位置提示部と、教示装置位置を移動体の目標位置として編集する位置編集部と、位置編集部で編集された目標位置を記憶する位置記憶部と、位置記憶部に記憶された目標位置を移動体に送信する位置送信部とを備え、移動体は、位置送信部から送られた目標位置を受信する位置受信部と、位置送信部から送られた目標位置を受信する位置受信部と、位置受信部にて受信した目標位置に従って移動を実行する移動実行部とを備える。
(もっと読む)
走行体が適用される建物、建物用の走行体及び建物用の走行体システム
【課題】高さ位置が相互に異なる床が存在する建物において、単一又は少数の走行体での対応を可能とする建物、その建物用の走行体及び建物用の走行体システムを提供する。
【解決手段】住宅10は、二階床部14によって上下に仕切られた一階スペース11と二階スペース12とを備えており、さらにこれら一階スペース11及び二階スペース12に隣接させて吹き抜けスペース16が設けられている。当該住宅10には、移動ロボット30が適用されており、移動ロボット30は各スペース11,12,16の床部13,14上を走行して特定の作業を行う。当該構成において、吹き抜けスペース16には昇降用軌道としてポール21が設けられており、移動ロボット30は当該ポール21を介して昇降することで各スペース11,12,16間を移動する。
(もっと読む)
工場内線路合流点近傍での台車接触事故防止装置
【課題】製鉄所などの工場内線路の本線から側線への合流点近傍における台車の接触事故を、確実かつ低コストで防止できる装置を提供する。
【解決手段】本線Aから線路を分岐させて側線Bへ合流させるための転てつ器1と、分岐点Dより後方の本線A近傍に設けられ、本線B上を走行中の台車F上から手動操作することにより転てつ器1を転換させる転てつ梃子2と、合流点Dより後方の側線B上または側線B近傍に設けられ、合流点Dに向かう台車Gの通過により、転てつ器1を線路分岐なしの状態に転換するとともに、その状態で鎖錠する転てつ器鎖錠スイッチ3と、合流点Dより前方の側線B上の台車同時立入禁止区域Hに台車Gが在線しているとき、転てつ器1を線路分岐なしの状態で鎖錠する転てつ器鎖錠回路4と、分岐点D近傍であるが台車F上からは手動操作できない位置に設けられ、前記鎖錠を解除する手動の転てつ器鎖錠解除ボタン5と、を備えた工場内線路合流点近傍での台車接触事故防止装置。
(もっと読む)
騒音低減装置
【課題】移動可能で遮音性能が高く、道路工事等に適した騒音低減装置を提供する。
【解決手段】騒音低減装置1は、車輪2を備えたベースフレーム3上に遮音壁4を搭載し、その一面に収音マイク5を配置し、他の面にスピーカを取付けている。ベースフレームにはアクティブ騒音制御回路及び増幅器と電源部、走行モータを内蔵している。任意の台数の騒音低減装置を連結してアスファルトフィニッシャ11の側方に配置し、アスファルトフィニッシャの進行に同期させて走行させる。アスファルトフィニッシャが生じる騒音は、収音マイクにて収音され、騒音とは逆位相の音響がスピーカから放射されて、アスファルトフィニッシャの側方へ伝播する騒音が低減される。
(もっと読む)
安全管理装置
【課題】簡易かつ安価な設備により、入坑者の安全性を確保することを可能とした、走行台車の安全管理装置を提案する。
【解決手段】坑内への入坑者Pが携帯する発信機3と、走行台車Cに取り付けられて、走行台車Cの進行方向前方であって20m以内にいる入坑者P1を検知し作動するパッシブセンサ1と、走行台車Cに取り付けられて、走行台車Cの周囲であって半径10m以内にいる入坑者P2が携帯する発信機3から発信された信号3aを受信して作動する受信機2と、走行台車Cの運転席に取り付けられて、パッシブセンサ1が作動することにより点灯する第一の警告灯と、受信機2が作動することにより点灯する第二の警告灯とを備えた安全管理装置。
(もっと読む)
搬送システム
【構成】 処理装置群Aのロードポート24を次の搬送先とする際に、その直上流側のエリアのバッファ群32−1,次に上流側のエリアのバッファ群32−2の順となる頻度で、直上流側を優先して上流側からバッファを割付ける。
【効果】 物品の次の処理先となるエリアの渋滞を防止する。
(もっと読む)
搬送装置の設備監視方法
【課題】搬送システムの実稼動中に走行時の加速度を計測することで早期に異常箇所を特定し、搬送システムの停止や事故を未然に防ぐようにした搬送装置の設備監視方法を提供すること。
【解決手段】搬送車2が走行レール1上を走行する搬送装置において、x軸、y軸、z軸の3軸方向を独立して計測する2組の加速度センサS1、S2を搬送車2に設置し、搬送車2が走行する際の加速度センサS1、S2の各軸ごとの加速度を計測し、計測値に基づいて設備の状態を判断する。
(もっと読む)
搬送台車システム
【課題】走行ルートに複数の選択枝があるような場合に、走行ルートの渋滞状況を的確に把握して、最も早く到着することができる走行ルートが選択できる搬送台車システムを提供する。
【解決手段】搬送台車システム10では、各台車1に、走行速度に基づく走行状況をコントローラ3に報告する走行状況報告手段1bを設け、コントローラ3に、各台車1の走行状況報告手段1bからの報告を集約して渋滞情報を生成する渋滞情報生成手段3bを設けた。
(もっと読む)
移動経路地図作成方法
【課題】 計算負荷が小さく、簡単な操作で以って移動経路地図を作成することができ、且つ精度が高く、いかなる走行環境下であっても確実に移動経路地図を作成することのできる移動経路地図作成方法を提供する。
【解決手段】 移動体の走行環境内にて該移動体を移動させながら移動経路上の移動体の位置座標を節点として教示し、隣接する節点同士を連結して移動経路地図を作成する移動経路地図作成方法であって、走行環境の上方に前記移動体の自己位置標定に用いられる複数のランドマークが配置され、前記移動体から撮像されたランドマーク画像を基に移動体の位置座標を測定し、該位置座標を前記節点として登録するようにし、前記移動体にて前記ランドマーク画像による自己位置標定が困難な走行環境下では、前記移動体を任意の距離移動させたときの移動状態量(オドメトリ)を基に該移動体の位置座標を測定するようにした。
(もっと読む)
移動ロボット装置
【課題】目標地点へ到達するまでの途中の移動地点を自動的・動的にロボット自身が決定することができる移動ロボット装置の提供。
【解決手段】移動ロボット装置は、互いに他と識別可能に配置された複数のマーカ34を画像検出しながら移動する。移動ロボット装置は、移動用情報記憶部28に、移動可能な領域の地図情報と、前記各マーカ34の前記地図情報上の位置を示すマーカ配置情報と、前記各マーカそれぞれの指向の特性を示す指向特性情報とを記憶している。ロボット装置へ移動の目標地点を与えると、まず、ロボット装置は現在の自己位置を示す現在位置情報を取得する。そして、移動用情報記憶部28の地図情報、マーカ配置情報、及び、指向特性情報と、前記目標地点と、現在位置情報とから、前記目標地点へ移動するための中間の移動地点を決定する。移動ロボット装置は、その移動地点へ移動する。
(もっと読む)
搬送車、制御装置及び搬送車の制御方法
【課題】搬送車同士の追突を防ぎつつ、搬送路上の搬送効率を向上させる搬送車を提供する。
【解決手段】搬送路に沿って走行する搬送車10は、他の搬送車へ運転状態情報を送信する送信部12と、他の搬送車から送信される運転状態情報を受信する受信部11と、受信部11によって受信された運転状態情報のうち、自車の直前を走行する搬送車の運転状態情報を少なくとも保持する情報保持部16と、自車の直前を走行する搬送車の運転状態情報に基づいて、自車の速度を決定し、当該速度に制御する速度決定・制御部13とを備える。
(もっと読む)
浮遊移動体の制御システム
この発明の目的は、波浪や潮流等による外乱下にあっても、浮遊移動体を所定位置に精度良く静止させたり、或いは目標軌道に精度良く追従させたりすることが可能な浮遊移動体の制御システムを提供することにある。
上記目的を達成可能な本発明の浮遊移動体の制御システムは、浮遊移動体10の制御システム1であって、上記浮遊移動体が、浮遊移動体の一部を占める、単一剛体とみなし得る本体部Bと、浮遊移動体に対して推力を発生する効果器部Eと、本体部と効果器部を力学的に結合する部分であり、効果器部から本体部に作用する推力を実測できるよう構成された推力伝達ゲートGとからなっており、上記推力伝達ゲートGからの推力測定値を用いて効果器部Eに対する推力指令を得る様にしたことを特徴とするものである(図4)。
(もっと読む)
1 - 17 / 17
[ Back to top ]