
Fターム[5H301CC07]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 制御変量、指令内容 (1,997) | 移動体自体の位置、進路 (1,814) | 進路 (869) | 3次元 (58)
Fターム[5H301CC07]に分類される特許
1 - 20 / 58
潜水ビークル
水中移動型検査装置及び水中検査設備
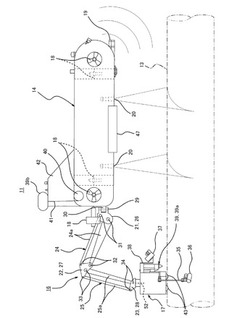
【課題】 海底構造物等の検査対象物が航走体の質量に基づく力を受けて損傷することを防止できるようにすると共に、検査対象物の検査を含む各種作業の質の向上を図ること。
【解決手段】 航走しながら海底パイプライン(検査対象物)13を検査することができる水中移動型検査装置11であって、潜水して、海底パイプライン13に対して非接触状態で検査対象物を辿りながら航走する航走体14と、この航走体14に設けられている第1可動アーム部16と、この第1可動アーム部16に設けられ、海底パイプライン13を検査するための検査用ツール部17と、航走体14が、海底パイプライン13に対して非接触状態で辿りながら航走するときに、第1可動アーム部16を作動させて、検査用ツール部17が海底パイプライン13に対して所定の目標位置関係となるように、検査用ツール部17を移動させることができる制御部とを備える。
(もっと読む)
飛行経路特定方法およびプログラム

【課題】複数の航空機が衝突を回避しつつ、迅速かつ効率的にそれぞれの目標位置に移動する。
【解決手段】飛行経路特定方法では、複数の航空機のうち任意の1の航空機が、他の航空機の目標位置と飛行経路とを受信し(S200)、他の航空機の目標位置を除く複数の目標位置から、到達までの時間が最短となる、または、到達に要するエネルギーが最小となる目標位置を選択し(S202)、自機の飛行状態に基づいて現地点から目標位置までの飛行経路を導出し(S204)、導出された飛行経路と他の航空機の飛行経路とを比較して、自機と他の航空機とが衝突するか否か判定し(S206)、衝突すると判定した場合、衝突しない飛行経路となるまで、飛行速度または飛行経路自体を変更する。
(もっと読む)
リモートコントロール方法及びリモートコントロールシステム
【課題】コスト高を招くことなく、目視できない状況下でも、移動体を直感的に操縦できるリモートコントロール方法及びリモートコントロールシステムを提供する。
【解決手段】移動体20、は、常に操縦者HMの視線方向(基準方向)と平行に、その前方を向けており、よって例えば視線方向に対して右に角度δの方向に進行したい場合、それに応じた操舵量だけ進行方向を操作する操縦装置のスティックを視線方向に対して右に角度δの方向に倒せばよい。
(もっと読む)
移動体の位置・姿勢推定システム
【課題】走行開始時の自律移動ロボットの位置・姿勢の推定にかかる時間を短縮し、高速応答の走行制御を可能とする。
【解決手段】距離センサ3の測定結果から得られた距離和データに対して、これに近似した距離和地図データ群内の距離和データを検索し、その結果に基づいて自律移動ロボットの位置・姿勢を推定するマッチング処理を行う。このとき、マッチング処理の探索条件を複数用意しておく。第1の探索条件は、走行履歴に含まれる距離和地図データの中で自律移動ロボット1が取り得る位置・姿勢の距離和地図データとする。第2の探索条件は、予め設定した経路上での自律移動ロボット1が取り得る位置・姿勢の距離和地図データとする。第3の探索条件は、通路内での位置・姿勢の距離和地図データとする。最終の探索条件は、地図データ内で自律移動ロボット1が取り得る位置・姿勢の距離和地図データとする。
(もっと読む)
人工衛星の姿勢決定装置および人工衛星の姿勢決定方法
【課題】人工衛星に搭載された複数のセンサデータを用いて、人工衛星の直流から高周波成分までの姿勢変動を広帯域に決定する。
【解決手段】姿勢センサ(1)と低周波角速度センサ(2)と高周波角速度センサ(3)とが搭載された人工衛星から、各センサの観測データを取得し、人工衛星の姿勢決定値を出力する装置であって、姿勢センサによる姿勢観測値と、低周波角速度センサによる低周波角速度観測値を用いて低周波姿勢決定値を求める低周波姿勢決定部(5)と、低周波角速度センサによる低周波角速度観測値と、高周波角速度センサによる高周波角速度観測値とをミキシングして、姿勢決定の対象区間内の周波数域において平坦なゲイン特性と位相特性を有する広帯域角速度を求める相補フィルタ部(6)と、低周波姿勢決定値と広帯域角速度とを用いて広帯域姿勢決定値を求める広帯域姿勢決定部(7)とを備える。
(もっと読む)
曲線ターンを辿るように複数のローターを有する回転翼無人機を操縦する方法
【課題】無人機が通常のターン経路上を飛行することを可能にする無人機の制御モードを提供する。
【解決手段】無人機10の各モーターは、姿勢及び速度の両方で無人機を操縦するために、異なる速度で回転するように制御可能である。遠隔制御装置16は、曲線経路に沿ってターンするコマンドを生成し、このコマンドは、左又は右ターン方向パラメーターと、ターンの曲率半径を規定するパラメーターとを含む。無人機は、上記コマンドを受信し、並びに、無人機の線形速度成分、傾斜の角度、及び角速度の瞬間測定値を取得する。受信したコマンド及び取得された測定値に基づいて、無人機のモーターを制御する制御ループの設定点値が生成され、これら設定点値は、地面に関連する座標系に対して無人機の水平線形速度及び傾斜を制御して、無人機に所定の接線速度uで曲線経路を辿らせる。
(もっと読む)
飛行体の飛行制御システム
【課題】簡便に而も高精度に飛行体の高さ位置の測定を可能とし、無人飛行時の飛行体の飛行高度を適正に制御可能とした飛行制御システムを提供する。
【解決手段】飛行体と、該飛行体に設けられた航行手段8,9,10,11と、位置測定部17と、前記航行手段を制御する飛行制御部18と、前記位置測定部と前記飛行制御部とを制御する主演算制御部19とを具備し、前記位置測定部は飛行体の地上座標を測定するGPS装置23と、飛行体下方のデジタル画像を撮像する鉛直カメラ13とを有し、該鉛直カメラにより撮像した2地点の画像と、前記GPS装置により測定した2地点の地上座標と、前記鉛直カメラの焦点距離に基づき前記飛行体の高度を測定し、前記主演算制御部は測定された高度に基づき前記飛行制御部を介して前記航行手段を制御し、前記飛行体を所定の高度で飛行させる。
(もっと読む)
自律移動ロボットの動作計画方法、自律移動ロボットの動作計画方法を利用した自律移動ロボットの制御方法、自律移動ロボットの動作計画装置、自律移動ロボットの動作制御装置、自律移動ロボットの動作計画プログラム、自律移動ロボットの制御プログラム
【課題】流速および流れの向きが不確定な環境中において、自律移動ロボットが目標位置に十分な精度で到達することを可能ならしめる動作計画を行う。
【解決手段】部分観測マルコフ決定過程(POMDP)のうち、行動主体の状態についての確率分布が状態のエントロピーにて表現可能であるという仮定に基づくAugmented MDPにおける動的計画法を応用する。本発明では、自律移動ロボットの状態が、デカルト座標、方位角、当該デカルト座標の確率分布についてのエントロピー、当該方位角の確率分布についてのエントロピーを含んで表現されており、デカルト座標と方位角からなる位置座標を確率的に計算する。
(もっと読む)
ジャイロスコープアレイを使用して角速度を減らすための方法とシステム
【課題】ジャイロスコープアレイを使用してビークルの角速度を減らす方法および装置を提供する。
【解決手段】ジャイロスコープアレイのジャイロスコープをディザリングし306、ジャイロスコープをディザリングすると共にジャイロスコープのジンバルモータを通る電流を得て308、ジャイロスコープをディザリングすると共に得られたジンバル・モーターを通る電流に基づくビークルの角速度を減少するジンバルレートコマンドを決定し314、前記ジンバルレートコマンドに基づいてジャイロスコープのジンバル・モーターを作動させる318、ことを特徴とする。
(もっと読む)
軌道追従制御装置、方法及びプログラム
【課題】制御対象物の状態変数の一階微分(例えば速度DX(t)/Dt)を計測及びフィードバックすることなく、スライディング制御を実現する。
【解決手段】スライディング制御の式の中で登場する定数λの値をfとする。また、定数λの値を、制御対象物の状態変数X(t)(例えば位置)、制御対象物の目標とする状態Xd(t)(例えば目標位置)を用いて制御対象物の目標とする状態の一階微分(例えば目標速度DXd(t)/Dt)に応じて適宜修正する。これにより、スライティング制御の式の中で登場する制御対象物の状態変数の一階微分(例えば速度DX(t)/Dt)の項を消すことができ、制御対象物の状態変数の一階微分(例えば速度DX(t)/Dt)を計測及びフィードバックすることなく、スライディング制御を実現することができる。
(もっと読む)
自律移動装置
【課題】状況に応じてタスクの実行に適した行動をとることが可能な自律移動装置を提供する。
【解決手段】自律移動装置1は、目的地まで自律的に移動する際に所定のタスクを実行する自律移動装置であり、環境地図311を記憶する記憶部31と、周囲の障害物情報を取得するレーザレンジファインダ20と、周囲の障害物情報から未知の障害物情報を特定する未知情報特定部32と、未知の障害物情報が特定された場合に、該未知の障害物に関連した動き情報、相対位置情報、属性情報からなる複数の判断情報を取得する判断情報取得部33と、判断情報に基づいて、タスクの実行をキャンセル又は続行する旨の行動シナリオ以外の行動シナリオであってタスクを実行するために定義された行動シナリオを含む、複数の行動シナリオの中から一つの行動シナリオを選択するシナリオ選択部34とを備える。
(もっと読む)
姿勢制御スラスタを使用してミサイルの飛行を制御する方法
ミサイルの飛行を制御する方法は、ミサイルの角度の変化率に基づく係数が閾値を超えたときを感知するために、ピッチレートジャイロスコープのようなジャイロスコープを使用することを含む。閾値を超えると、1つ以上の補償スラスタを使用して、角度の変化率を下げることが決定され得る。補償スラスタを使用すると、残留角運動速度が修正され得る。残留角運動速度は、意図した針路にミサイルを置くために使用される軌道修正操縦に起因する。更に、軌道修正操縦後にもたらされる、例えば、ミサイルのメインロケットモータによって与えられるスラストの調整不良によってもたらされる、ミサイルの機首方位における誤差を補償するために、補償スラスタが使用され得る。ピッチとヨーの方向における角度の変化を補償するために、複数の補償スラスタが使用され得る。 (もっと読む)
パドル電流測定値フィードバックのみを使用したジャイロなし遷移軌道太陽捕捉
【課題】宇宙船が自身を操作して、太陽電池パネルを最大の太陽曝露回転姿勢に方位転換させることができるように、パドル電流測定値フィードバックのみを使用した、ジャイロなし遷移軌道太陽捕捉のシステム及び方法を提供する。
【解決手段】太陽電池パドル電流フィードバックのみを姿勢制御のための唯一の閉ループフィードバックセンサとして使用して宇宙船操作を制御することを含む。宇宙船の回転軸方位及び回転速度を制御するために、回転コントローラが使用される。回転コントローラは、宇宙船の回転軸方位を慣性固定方向と一致させ、モーメンタムベクトルを利用して所定の回転速度で回転するように命令する。さらに、宇宙船本体の角速度及び宇宙船の姿勢を推定する方法は、太陽電池アレイ電流及び宇宙船のモーメンタムの組み合わせを、太陽電池パドル電流フィードバックを唯一の閉ループフィードバックセンサとするコスト関数として利用する。
(もっと読む)
水中航走体の自律制御方法及び自律制御型水中航走体
【課題】 巡回経路上に障害物が存在していても、緊急回避動作回数を低減させる。
【解決手段】 ウェイポイント制御により巡回経路に沿って設けた各ウェイポイントを巡回させる自律制御型水中航走体が、1つのウェイポイントの場所から次に辿る順序のウェイポイントの場所を目標地点として移動する経路上で、水中航走体に装備した障害物検出ソナーにより経路上の障害物が検出されると、水中航走体を障害物のない方向へ移動させる緊急回避動作を行い、回避終了時の水中航走体の位置に、巡回経路の次の周回以降に経由させるための新たなウェイポイントを追加する。これにより、障害物が検出された周回の次の周回以降は、水中航走体を、追加されたウェイポイントを経由させることで、障害物に差し掛かることなく巡回させる。
(もっと読む)
自律航走体運動モニタ用ディスプレイ装置
【課題】自律航走体の運動状態を直観的にすばやく正確に把握できる自律航走体運動モニタ用ディスプレイ装置を提供する。
【解決手段】直方体における隣接する3面を構成するように互いに直交して配置された第1平面ディスプレイ13、第2平面ディスプレイ14及び第3平面ディスプレイ15を有するマルチディスプレイ12と、時間的に変化する自律航走体の運動状態を、各ディスプレイに表示させる処理装置30とを備える。処理装置30は、各ディスプレイ13〜15の画面上に自律航走体の姿勢を示す情報を表示させる。処理装置30は、各ディスプレイ13〜15の画面上に自律航走体の位置、移動軌跡及びウェイポイントを示す情報を表示させてもよい。
(もっと読む)
自律移動装置
【課題】構造体により限定された作業空間内で移動する自律移動装置の移動可能な領域が拡大されて作業領域が拡大され、隣接した作業領域へ作業装置を容易に移動させることができる自律移動装置を提供する。
【解決手段】本発明による自律移動装置は、メインフレーム、メインフレームの上部に結合される複数の上部ウインチ及びメインフレームの下部に結合される複数の下部ウインチを含み、作業空間内に位置する移動プラットフォームと、一端部は構造体の下側にそれぞれ結合され、他端部は上部ウインチにそれぞれ連結されて長さが調整可能な複数の第1ワイヤと、一端部は構造体の上側にそれぞれ結合され、他端部は下部ウインチにそれぞれ連結されて長さが調整可能な複数の第2ワイヤと、を含むことを特徴とする  (もっと読む)
(もっと読む)
移動経路計画装置、移動体制御装置及び移動体
【課題】移動体の経路計画効率の向上を図ることが可能な移動経路計画装置を提供する。
【解決手段】移動体の進行方向を撮影する撮影手段と、前記撮影手段から得られる撮影画像を基に所定の画像処理を行うことにより、前記撮影画像に存在する通行痕跡を検出する画像処理手段と、前記画像処理手段によって検出された通行痕跡を基に前記移動体の移動経路を計画する経路計画手段とを備える。
(もっと読む)
水中移動体の制御装置
【課題】水中移動体の位置および姿勢を精度良く制御する水中移動体の制御装置を提供することにある。
【解決手段】指令速度−指令推力変換手段24は、コントローラ13から入力した速度指令値を指令推力へと変換する。PID制御器27は、変換された指令推力と、3軸周りの角速度と3軸方向の加速度から、XYZ方向の推力制御量を算出する。スラスタ推力配分手段28は、XYZ方向の推力制御量を各スラスタが発生するスラスタ推力に変換する。スラスタ推力−モータ電圧変換手段29は、スラスタ推力を各スラスタの駆動モータの指令電圧へと変換し、スラスタ21,22,23に供給し、水中検査装置9を動作させる。初期キャリブレーション手段30は、指令値−指令推力変換手段24とスラスタ推力−モータ電圧変換手段29で用いる変換ゲインを予め同定し、同定した変換ゲインを各手段24,29に設定する。
(もっと読む)
物体の特徴情報を抽出するための装置と方法、及びそれを利用した特徴マップ生成装置と方法
【課題】 移動ロボットの位置認識のための特徴マップ生成及び周辺の特徴情報抽出技術を提供する。
【解決手段】 光を放出する3D距離センサーを用いて取得された情報から反射関数を含む特徴情報を抽出し、これに基づいて特徴マップを生成させるために周辺の環境変化にあまり敏感ではない特徴マップを生成させることができ、特徴マッチング時の成功率を高めうる。
(もっと読む)
1 - 20 / 58
[ Back to top ]