
Fターム[5H301CC10]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 制御変量、指令内容 (1,997) | 移動体の作業内容 (20)
Fターム[5H301CC10]に分類される特許
1 - 20 / 20
ロボット掃除機及びその制御方法
【課題】ロボット掃除機及びその制御方法を提供する。
【解決手段】ロボット掃除機の制御方法は、第1の掃除モードに従って、前記ロボット掃除機の位置を基準にして多数の掃除領域を定義すること;及び定義された前記掃除領域別に順次掃除を行うこと;を含む。本発明のロボット掃除機及びその制御方法によると、繰り返しモードが開始され、ロボット掃除機の位置を基準にして多数の掃除領域を定義し、掃除領域別に順次掃除を行うとき、基準壁面の検出可否によってロボット掃除機が属した掃除領域を再設定し、再設定された掃除領域内で走行経路に沿って移動しながら掃除を行うので、掃除が1回も行われていない領域や掃除の重複領域を減少させることができる。また、掃除が1回も行われていない領域や掃除の重複領域を減少させることによって、ロボット掃除機の掃除効率を向上させることができる。
(もっと読む)
搬送システム、および、台車割り付け方法

【課題】搬送システムにおいて自走式台車に搭載されるバッテリーの寿命を維持する。
【解決手段】バッテリー115を搭載し荷物を搬送する自走式の台車101と、充電ステーションと、管理手段とを備える搬送システムであって、バッテリー115の放電量を示す情報である放電量情報を作成する放電量作成部116と、バッテリー115に許容される放電量を示す情報である残量情報を放電量情報に基づき作成する残量作成部117と、要求される仕事に含まれる目的地の位置を示す情報である目的地情報と台車101の位置を示す情報である現在地情報とに基づき、要求される仕事に必要な放電量を示す情報である必要量情報を作成する必要量作成部と、残量情報から必要量情報を減じて得られる差が第一閾値を上回る場合、要求される仕事を台車101に割り付ける割付部とを備える。
(もっと読む)
生産設備制御システムおよび生産設備制御方法
【課題】作業者が生産設備の電源制御の指示を認識することができる生産設備制御システムを提供する。
【解決手段】本発明の生産設備制御システム100は、設備制御部120、放送装置130、および情報収集器140を有する。設備制御部110および放送装置120は、可聴音帯域の特定周波数の信号レベルを特定周波数より低い周波数で周期的に変化させて生成された音波を送信する。情報収集器140は、音波を受信して特定周波数の信号レベルを選択的に抽出し、抽出された特定周波数の受信信号レベルの変動が設備制御部120による送信信号レベルの周期的な変化に対応する場合、特定周波数の周波数成分を解析した結果に基づいて制御対象設備150,160に対して電源制御または運転制御を実行する。
(もっと読む)
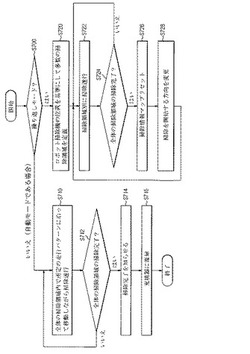
走行台車システムとその自己診断方法
【課題】
移動体システムでのトラブルの発生を予防する。
【構成】
複数の走行台車が地上側コントローラの指示により走行経路に沿って走行するシステムを自己診断する。地上側コントローラは、走行経路上の位置を一意に特定する絶対座標により、異常検出用センサによる検出を行う位置を走行台車に指定し、走行台車は、指定された位置で異常検出用センサによる検出を行い、検出位置と検出時刻を含む検出データを地上側コントローラへ報告する。
(もっと読む)
自律移動装置による荷物の受け渡し方法
【課題】自律移動装置による荷物の受け渡し方法において、簡単な構成により、作業台を床面等に常時固定していなくても荷物の受け渡しを確実に実現可能とする。
【解決手段】自律移動装置1は、作業台2の位置を認識して所定位置まで接近した状態で作業台2に力を及ぼすことにより作業台2を動かないように固定し、その後に作業台2との間で荷物3の受け渡しまたは受け取りを行なう。作業台2として既存の机などを用いることができる。台固定機構4は、人の腕に類似の2関節アーム機構であり、不図示の駆動機構から第2アーム42に伝達される動力によって作業台2の荷物載置面21を下方に押さえつける。これにより、作業台2と自律移動装置1との相対位置が固定される。作業台2をアンカー等によって床面等に常時固定していなくても荷物3の受け渡しを確実に実現でき、作業台2の配置変更を容易に実施できる。
(もっと読む)
遠隔操作装置
【構成】遠隔操作装置10は、LRF12a,12bを含み、LRF12a,12bと同じ場所に設けられるロボット14を遠隔操作する。遠隔操作装置10はLRF12a,12bを利用して検出領域(E)内に居る人間の局所行動を検出し、その局所行動を記録する。検出領域(E)内は空間グリッド化され、その空間グリッド毎に局所行動のヒストグラムが算出される。遠隔操作装置10は、ヒストグラムから算出される類似度に基づいて空間グリッドをクラスタリングして、クラスタリング地図をLCD(22)に表示する。表示されたクラスタリング地図に含まれる任意のエリアが選択されると、ロボット14には、選択されたエリアの属性に基づいて決まる動作命令と、座標情報とが付与される。
【効果】使用者は、複数の人間の行動が視覚的に示されるクラスタリング地図を参照して、ロボット14を遠隔操作することができる。
(もっと読む)
移動型の搬送物受渡し装置
【課題】移動型の搬送物受渡し装置において、簡単な構成により、移動可能な位置に任意に配置されたステーションの固定された載置台に対して、柔軟な搬送物であっても、搬送物の受取りまたは置渡しを行うことを可能とし、かつ、ステーション間で搬送を行うことを可能とする。
【解決手段】本装置1は、搬送物Mが載置される上下動可能な、櫛歯状部材21を有した移載部2と、移載部2を上下動させる駆動部3とを備える。移載部2は、ステーションSTにおける櫛歯状部材51を有した載置台5に対して両者の櫛歯状部材21,51が互いに噛み合わせ可能なように構成されている。制御部10は、両櫛歯状部材21,51が前後方向において互いに噛み合わせ可能な位置に装置1を移動させ、さらにステーションSTに接近させて移載部2を載置台5に噛み合わせた状態とし、移載部2の上動または下動によって搬送物Mの受渡しを行う。
(もっと読む)
ロボット装置におけるスキーマの学習と使用
【課題】環境との相互作用時の挙動に優れた自律移動ロボット制御方式を提供する。
【解決手段】スキーマを使用し、該スキーマは、ロボットが設定されたゴールを達成するようにするための、パラメータで表した運動指令の系列の集合であって、該系列のためのパラメータは、該ロボットコントローラの状態変数から得られ、該ロボットコントローラへ知覚入力を供給するためのインタフェースと、スキーマ認識モジュールからの入力、または逆方向モデルモジュールからの入力、またはそれらの組み合わせを供給されるスキーマ状態メモリと、状態変数及び格納されたスキーマに基づいて、運動指令を生成する逆方向モデルと、状態変数及び格納されたスキーマに基づいて、状態変数を予測する順方向モデルと、該ロボットコントローラによって制御された該ロボットの、供給された状態変数に基づいてスキーマを選択するスキーマ認識モジュールと、を備えた。
(もっと読む)
自動搬送車及びその自動搬送車を使用する自動搬送車運行システム
【課題】様々な作業記号を明示した搬送指示ラインに沿って自動走行する自動搬送車及びその自動搬送車を使用する自動搬送システムを提供する。
【解決手段】部品等を運搬する台を載置可能なフレーム1と、フレーム1の下面に走行面を撮影可能に取り付けられる撮影機2と、撮影機2からの画像信号を受信して画像処理を行う画像処理ユニット3と、画像処理ユニット3から画像処理信号を受信し駆動車輪5を駆動させる駆動モータ6と駆動車輪5の走行方向を回転させるステアリング7とへ制御信号を送る制御ユニット4とを有する。
(もっと読む)
搬送車システム
【構成】 複数の搬送車が走行する走行ルートに沿ってロードポートを設け、コントローラから搬送車へ搬送指令を割り付けると共に、割付済みの搬送指令を他の搬送車に移し替える。搬送指令を他の搬送車に移し替える際に、荷すくいするロードポートに他の搬送車が停止可能か否かを判別し、停止可能な際にのみ搬送指令を移し替える。
【効果】 搬送指令を移し替えた搬送車が、搬送指令とは異なる方向に分岐することがなくなる。
(もっと読む)
搬送制御装置及び搬送システム
【課題】例えば半導体装置製造用の各種基板などの荷を搬送する搬送車に夫々備えられており、地図情報に従って当該搬送車を軌道上で如何に搬送させるかを決める搬送制御装置において、当該搬送車の停止時間をなるべく短くする。
【解決手段】搬送制御装置は、地図要素を含む基準地図データを格納する第1格納手段(5b)と、地図要素に対して修正が加えられる場合に、修正用地図データを受信する通信手段と、受信された修正用地図データを格納する第2格納手段(5a)と、所定のトリガーを受けて、格納されている修正用地図データを取り出して、取り出された修正用地図データで、格納されている基準地図データを置き換える更新手段(4)と、格納されている基準地図データに従って、軌道上で搬送車が如何に搬送するかを決め、決められた通りに搬送するように搬送車を制御する制御手段(4)とを備える。
(もっと読む)
搬送車システム
【構成】 搬送指令で荷すくいするロードポートに最初に到着予定の搬送車が実荷で、かつ荷すくいするロードポートへの到着前に荷下ろし予定の場合、最初に到着予定の搬送車の後方所定距離内に空荷の搬送車が存在する際に、空荷の搬送車に搬送指令を割り付け、後方所定距離内に空荷の搬送車が存在しない際に、最初に到着予定の搬送車に搬送指令を割り付ける。
【効果】 最初に到着予定の搬送車が荷すくいする間、後方の空荷の搬送車が停止する無駄を解消できる。また荷すくいするロードポートの下流側では、空荷の搬送車が先行し、実荷の搬送車が後行するので、荷すくいに空荷の搬送車を割り当てることができる。
(もっと読む)
走行車システム
【構成】 コントローラから走行車に搬送指令を割り付け、物品の搬送と受け渡しとを行う。コントローラは、走行車からの搬送指令の完了報告の受信前に、次の移動先を指示し受け渡しを指示しない移動予約を走行車に送信し、完了報告を受信すると次の搬送指令を送信する。走行車は搬送指令を完了するとコントローラへ報告し、移動予約を受信すると、実行中の搬送指令の完了後に移動予約で指示された移動先へ走行する。
【効果】 走行車がコントローラからの指令を待って停止する期間が無く、また走行車が搬送指令を2重に持つタイミングが生じない。
(もっと読む)
ロボットクローラのための可変プリミティブマッピング
高レベル(オペレータ入力)プリミティブ42、64から低レベルプリミティブ46、70への可変マッピングを用いることによって、ロボットクローラ10の種々の動作モードが与えられる。そのマッピングは、ロボットクローラ10によって検知される環境データ74、94の関数であり、それにより、動作モードを環境に合わせることができるようになる。 (もっと読む)
物品取扱いシステムおよび物品取扱いサーバ
【課題】生活空間において、物品を管理したり操作したりする作業を支援するシステムを提供する。
【解決手段】カメラなどのセンシング手段1は、家庭などの生活空間における物品や、人を含む移動体の状況をセンシングする。物品管理・操作サーバ2はセンシング手段1の情報から、各物品について、現在位置、操作者などを含む属性情報を物品データベース3に管理する。そしてサーバ2は、操作手段4から入力されたユーザの指示を受け、この指示を、物品データベース3を参照して制御コマンドに変換し、生活支援ロボット5に送信する。
(もっと読む)
移動監視ロボット
【課題】 巡回経路上の重点的な監視場所と、そうでない場所を推測困難として、警備能力を向上する。
【解決手段】 移動監視ロボット2は、所定の移動経路に沿って移動手段で自律移動して警備情報を収集する。移動監視ロボット2の記憶部21は、移動経路上において必ず停止する位置である重要監視位置を予め記憶している。停止位置テーブル処理部22は停止位置生成部に相当し、移動経路に沿って移動を開始する前に移動経路上において停止する所定数の停止位置をランダムに生成する。移動制御部13は、自己の現在位置に基づき、現在位置が重要監視位置または停止位置と一致すれば当該位置に所定時間停止するように移動手段11を制御する。
(もっと読む)
移動体操作システム
【課題】操作を容易にし、しかも、移動体に対して常に正しい移動指示を行う。
【解決手段】遠隔操作端末は赤外線LEDから偏光板を介して赤外線を発信するとともに超音波発信器から超音波を赤外線と同じタイミングで発信する。移動体は遠隔操作端末からの赤外線を、それぞれ異なる偏光角度を持った偏光板13,14を介してホトディテクタ11,12で受光するとともに超音波を超音波受信器10で受信する。CPU30は赤外線を受信してから超音波を受信するまでの時間をカウンタ31にカウントさせる。そして、このカウントした時間から遠隔操作端末との距離を測定し、この距離がメモリ32に初期設定されている所定の距離に常に一致するように移動体を走行制御する。また、2つのホトディテクタの受光出力のピーク値を検出し、そのピーク値の関係から遠隔操作端末との方向角度を検出し、その方向角度が例えば0°になるように移動体を制御する。
(もっと読む)
自律走行移動体
【課題】 走行空間内の壁際や隅についても探索走行ができ、自律走行移動体を用いて作業を行うことができるとともに、走行空間内を探索移動するために必要な検知手段や検出手段の数をできるだけ減らし、小型化することが可能な自律走行移動体を提供することである。
【解決手段】 自律走行移動体1は、移動体本体10と、移動体本体10を走行させる駆動輪12と駆動モータ14と、駆動モータ14を制御する制御部20と、移動体本体10を走行させるための走行情報が入力され、かつ、入力された走行情報に基づいて駆動モータ14を制御するための制御情報を制御部20に与える操作ユニット50とを備える。
(もっと読む)
無人搬送車の充電制御方法
【課題】 無人搬送車10が充電器13から充電を行っている間に、無人搬送車11と無人搬送車10との間に充電器が無い場合、無人搬送車11は、無人搬送車10が充電を終わるまで待機することとなり、作業能力の低下を招いている。
【解決手段】 無人搬送車10の進行方向がSlで次の充電ポイントまでに1台も他の無人搬送車が無くまた次の充電ポイントの充電器14が充電中で無い場合に上位コンピュータ2は充電終了の指示を給電用コンピュータ3に指示し、終了の指示を受けた給電用コンピュータ3は充電器13に対し充電終了を指示する。充電終了の指示を受けた充電器13は無人搬送車10に対し充電終了の指示を発行し無人搬送車10は現在の充電を終了し、次の充電ポイント14に向かう。
(もっと読む)
作業車両に於けるポジション制御装置
【課題】 車体のエンジン始動時に作業機昇降用のアクチュエータの駆動を禁止する牽制装置を設けた作業車両に於いて、牽制装置の作動を解除するタイミングを改善して確実な牽制解除を実行する。
【解決手段】 ポジションセンサの計測値とリフトアーム角センサの計測値が一致する設定点(A)を中心として、その上方に所定範囲の上部制限領域(+B)を設けるとともに、その下方に上部制限領域と同一幅の下部制限領域(−B)を設けておく。牽制装置が作動しているときに、リフトアーム角センサの計測値が設定点(A)にあり、ポジションセンサの計測値(C1)が上部制限領域(+B)の外にある場合、または下部制限領域(−B)の外にある場合は、この制限領域の外から一方の制限領域を通り抜けて他方の制限領域に入ったときに、牽制装置の作動を解除する。
(もっと読む)
1 - 20 / 20
[ Back to top ]