
Fターム[5H301DD16]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体への指令の設定方法、設定手段 (1,386) | 無線により与えられるもの (358) | 光により与えられるもの (42)
Fターム[5H301DD16]に分類される特許
1 - 20 / 42
掃除ロボット
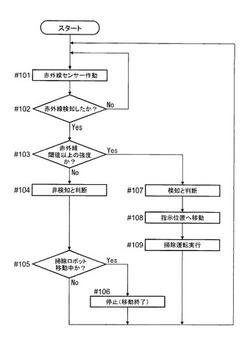
【課題】ユーザーが所望する任意の位置まで容易に誘導することができ、効率がより高い掃除運転を遂行することが可能な掃除ロボットを提供する。
【解決手段】掃除ロボット1は吸込口6と排気口7とを開口して床面上を自走する本体筐体2と、本体筐体2内に配置した電動送風機22と、電動送風機22の駆動によって吸込口6から吸い込まれた気流の塵埃を集塵する集塵部30と、赤外線を発することにより本体筐体2の設置空間の任意の位置を指定する赤外線リモコン60と、赤外線リモコン60によって指定された指示位置を検知する赤外線センサー18と、を備え、赤外線センサー18が検知した指示位置まで移動して及び/または指示位置までの移動中に掃除運転を実行する。
(もっと読む)
自動走行装置及びそのナビゲーション方法

【課題】吸引ロボット及び掃引ロボット等の床を掃除するための掃除装置であって1又は複数の光センサを具備する自動走行装置を提供する。
【解決手段】自動走行装置1が、前置増幅器と、位相敏感検波器と、中央制御部と、を有し、光センサ6、7、8により出力された信号が中央制御部により与えられた信号パターンと比較され、かつ、信号は、複数の光センサ6、7、8の構成における個々の光センサ6、7、8の方向とともに、又は、1つの光センサ6の角度方向とともに、自動走行装置1の制御に関係付けられる。
(もっと読む)
ロボットシステム
【課題】ネットワークデータブリッジおよび移動式ロボットを備えるロボットシステムが提供される。
【解決手段】ネットワークデータブリッジ202は、インターネットプロトコルネットワークに接続可能な広帯域ネットワークインターフェイスと、無線コマンドプロトコルネットワークに接続可能な無線コマンドインターフェイスと、広帯域ネットワークインターフェイス経由で受信するシリアルコマンドを抽出し、無線コマンドインターフェイス経由でブロードキャストするデータブリッジ構成要素と、を備える。また、移動式ロボット104は、ロボットを動かす駆動システムと、ネットワークデータブリッジから送信されるシリアルコマンドを受信する無線コマンド通信構成要素と、を備える。さらに、ネットワークデータブリッジは、製造者サーバおよび移動式ロボット間の通信のため、広帯域ネットワークインターフェイスを介して製造者サーバに接続可能である。
(もっと読む)
自律カバレッジロボットナビゲーションシステム
【課題】ナビゲーションビーコンにより自律モバイルロボットを隣接する有界領域に移動可能とする。
【解決手段】ナビゲーションビーコンは、第1の有界領域と、隣接する第2の有界領域との間のゲートウェイ内に配置されたナビゲーションビーコンによって、ゲートウェイマーキングエミッションを伝送するように構成されたゲートウェイビーコンエミッタを有し、自律カバレッジロボットは、ビーコンエミッションに応答するビーコンエミッションセンサ(104、106)と、ゲートウェイマーキングエミッションの検出に応えてロボットの方向を変える清掃モードで、ロボットを第1の有界領域周辺にて動かすように構成された駆動システムとを含み、駆動システムは、マイグレーションモードにおいて、ゲートウェイを通って第2の有界領域へとロボットを動かす。
(もっと読む)
自動追従式台車
【課題】追従すべき作業者を識別し、複数の作業者が同じフロアでそれぞれ台車を追従させて作業できる自動追従式台車を提供する。
【解決手段】台車1に取り付けられる受光器2R、2C、2Lと、作業者3に取り付けられて、その作業者3を特定するための所定の発光パターンで発光する発光器4と、上記受光器2R、2C、2Lで受光した発光パターンを識別することにより作業者3を識別し、その作業者3を追従するよう移動制御を行う制御手段8とを備えている。
これにより、台車1に取り付けられた受光器2R、2C、2Lは、作業者3に取り付けられた発光器4で発光された作業者3を特定する発光パターンを受光して作業者3を識別し、識別した作業者3を追従するよう移動制御を行う。
(もっと読む)
搬送用走行体の走行制御方法
【課題】地上側から作業区間WA内の全ての搬送用走行体1に対して走行可信号を確実に伝送する手段のコストダウン、実施の容易化を図る。
【解決手段】各搬送用走行体1には、作業区間WA内において前後に隣り合う搬送用走行体1間でデータ通信を行うデータ通信手段13,14と、地上側通信装置との間でデータ通信を行う機上側通信装置15が設けられ、前記作業区間WAの一端部には、通過する搬送用走行体1の前記機上側通信装置15に走行可信号を送信する地上側通信装置18a,18bが配設され、この地上側通信装置18a,18bから受信した走行可信号を、作業区間WA内を走行する他の全ての搬送用走行体1に前記データ通信手段13,14を介して伝送し、作業区間WA内の各搬送用走行体1を、受信した走行可信号に基づいて作業速度で自走させる。
(もっと読む)
搬送用走行体の走行制御方法
【課題】走行速度可変の自走式搬送用走行体1を作業区間WAに一定の作業速度VLまで減速させた状態で進入させること。
【解決手段】各搬送用走行体1には、前後に隣り合う搬送用走行体1間でデータ通信を行うデータ通信手段13,14が設けられ、作業区間WAの上手側走行経路中には、計測起点P1が設定され、作業区間WAへ高速で接近する後ろ側搬送用走行体1Zとその前方の作業速度VLで走行する前側搬送用走行体1Yには、計測起点P1からの走行距離に相当する現在位置情報を持たせ、後ろ側搬送用走行体1Zでは、自体の現在位置情報と前記データ通信手段を介して受け取った前側搬送用走行体1Yの現在位置情報とに基づいて前側搬送用走行体1Yとの間の距離を演算させると共に当該距離の漸減変化に基づいて減速制御を行わせ、前記距離が設定値に達したドッキング完了時に後ろ側搬送用走行体1Zが作業速度VLで自走しているように制御する。
(もっと読む)
走行車システム
【課題】走行車の走行経路レイアウトの自由度を上げる。
【解決手段】走行車システム1は、走行車10と、走行時給電装置60と、停車時給電装置70と、を備える。走行車10は、受電コア51と受電コア51に巻かれたピックアップコイル53とを含む受電ユニット23と、受電ユニット23を介して受けた電力を蓄えるバッテリ27と、を有する。走行時給電装置60は、走行車10の走行時に、受電ユニット23に対向して非接触にて受電ユニット23に給電する一対の給電線63を有する。停車時給電装置70は、受電ユニット23に対向する給電コイル79を有し、走行車10の停止時に非接触にて受電ユニット23に給電する給電部75を有する。
(もっと読む)
物品搬送装置
【課題】低コストの簡易な制御手段であっても制御できるように制御条件を簡素化することができる物品搬送装置を提供すること。
【解決手段】複数台のトラバーサ4a,4b,4cが同一のレール5に沿って走行されるとともに、このレール5の複数箇所に設けられるコンベヤ14〜18にて、各トラバーサ4a,4b,4cにコンテナ2が移載されるようになっており、所定の制御条件に基づいて、トラバーサ4a,4b,4cをコンベヤ14〜18に移動させる制御を行う制御手段が設けられる物品搬送装置1であって、制御条件によって、各コンベヤ14〜18が各トラバーサ4a,4b,4cの配置に対応させて予めグループ化されており、制御手段は、各トラバーサ4a,4b,4cが対応するグループS1〜S3のコンベヤ14〜18に向かう動作を互いに同期させる制御を行う。
(もっと読む)
自走車
【課題】指等の入力指示体の最低限の動きで操作情報を入力することができる自走車を提供すること。
【解決手段】電動車椅子1において、車椅子本体10に対する操作入力に赤外光を利用した光学式の操作入力装置100を用いているため、指Ob1の小さな動きで操作入力を行なうことができる。このため、操作レバーを手動操作できない者や、音声入力できない者であっても、車椅子本体10を操作することができる。また、電動車椅子1には、赤外光を利用した光学式の障害物検出装置200を設けたため、安全な走行を実現することができる。
(もっと読む)
無人搬送車の交差点制御装置及び交差点制御方法
【課題】交差点内の障害物を直接検出して、交差点における進入、退出の制御を行う無人搬送車の交差点制御装置及び交差点制御方法を提供する。
【解決手段】交差点Xを、エリアA、B1、C1、D1、E1、B2、C2、D2、E2に分割すると共に、各エリアにおける障害物の有無及び変化を検知する光エリアセンサ22を交差点Xに設け、交差点Xに進入してきたAGV11を、エリアB2に待機させると共に、光エリアセンサ22を用いて、全エリアにおける障害物の検知を行い、エリアA、B1、C1、D1、E1に障害物が無い場合、待機させたAGV11に交差点Xへの進入許可を与える。
(もっと読む)
無人搬送システム
【課題】搭載メモリを増やすことなく、停止位置数、分岐点数を増やすことができる無人搬送システムを提供する。
【解決手段】搬送ルート1を、2つの搬送路群1L、1Rと2つの搬送路群1L、1Rが共用する1つの共用路1cとから形成すると共に、共用路1Cから2つの搬送路群1L、1Rへ分岐する最初の分岐点B1以降において、分岐路W1L〜W25L、W1R〜W25R及び停止位置ST001〜ST050、ST101〜ST150を、2つの搬送路群1L、1R同士で互いに同じ位置関係になるように配置し、最初の分岐点B1においては、HS20からの指示により、2つの搬送路群1L、1Rのいずれか一方にAGV10を進行させ、各搬送路群1L、1Rにおいては、共に、同じ内部データを用いて、左右いずれか一方の分岐路へAGV10を進行させる。
(もっと読む)
リモートコントロール装置
【課題】ジョイスチックでコントロールするリモートコントロール走行体の走行に関して、操縦器と走行体の位置関係による角度誤差を少なくすること、制御可能な角度範囲をひろげる。
【解決手段】操縦器1から見た走行体2の位置の方位γと、操縦器1から見た走行体2の向きβ、操縦器1の操縦による目標角αを得て、これらのデータα、β、γを演算した値で走行体2の向き変更駆動手段を駆動する。それによってすべての位置関係で正確な制御ができるようになる。
(もっと読む)
搬送システム制御装置、搬送システムの制御方法およびプログラム
【課題】無人搬送台車(AGV)をより高い充電残量で待機させておくことが可能な搬送システム制御装置、搬送システムの制御方法およびプログラムを提供する。
【解決手段】本発明に係る搬送システム制御装置に対して、生産ラインにおける物品の生産状況に関する情報である生産状況関連情報を取得する生産状況関連情報取得部と、AGVの充電量に関する情報を含む搬送台車関連情報を取得するとともに、AGVが実行すべき作業に関する指示を伝送し、AGVの稼働状況の制御を行う無人搬送台車制御部と、生産状況関連情報および搬送台車関連情報に基づいて、無人搬送台車の稼働状況予測シミュレーションを行ってAGVの搬送負荷を予測し、搬送負荷の予測結果に基づいて、AGVに対して割り付ける作業を決定する稼働スケジュール決定部と、を設けた。
(もっと読む)
無人飛行物体を着陸させるために、プラットフォーム、特に海軍プラットフォームへの接近段階の間、無人飛行物体を誘導するシステム
本発明は、無人飛行物体を着陸させるために、プラットフォーム、特に海軍プラットフォーム(1)への接近段階の間、無人飛行物体を誘導するシステムにおいて、前記プラットフォームは、水平面からの所定の角度区域にわたって光誘導ビームの配列(2)を放射する滑空角指示装置を備えるとともに、前記無人飛行物体に前記誘導ビームを追従させるために、前記無人飛行物体は、画像解析手段(7)と、前記無人飛行物体の自動操縦手段(9)に指令するための命令の演算手段(8)とに接続されたビーム捕捉カメラ(6)を備えることを特徴とする。  (もっと読む)
(もっと読む)
無人搬送台車の制御装置、その制御システム及びその制御方法、並びに、プログラム
【課題】無人搬送台車を用いた搬送を効率的に行うことができるようにする。
【解決手段】障害物を検知する障害物センサを具備する無人搬送台車(AGV)120が走行路を走行する際に、当該無人搬送台車(AGV)120の動作を制御する制御装置100において、搬送を行う前に、無人搬送台車(AGV)120に走行路を走行させて当該走行路の各地点において無人搬送台車(AGV)120と通信を行って、走行路の各地点間の走行区間ごとに、障害物センサのオン/オフに係る検知状態の情報を取得する。そして、実際の搬送を行う際に、制御装置100は、無人搬送台車(AGV)120に対して、搬送を行う前に取得した障害物センサのオン/オフに係る検知状態の情報に基づいて、障害物センサがオンとなる走行区間については障害物センサの検知に基づく動作を不能とする制御を行う。
(もっと読む)
搬送用自走車の充電管理方法及びシステム
【課題】ラインへの施工が簡単で、充電完了AGVが多くなっても0になっても、メインルート、充電ルートは常に一定台数に管理できてメインルートの運搬に遅れを生じさせることはなく、ラインの円滑な稼動を妨げることのないAGVの充電管理方法を提供する。
【解決手段】自動充電場10が設置されたメインルートMRを周回走行する、バッテリ駆動の複数台のAGV1の充電管理方法であって、AGV1がメインルートMRに設けられたバッテリ電圧チェック用マーカ8aを検出してAGV1のバッテリの電圧測定をする第1工程と、測定されたバッテリ電圧が要充電レベルまで低下している場合にAGV1を自動充電場10に設置された充電ルートCRに変更進入させて充電位置で停止させ、そのバッテリに自動充電機10によって自動充電させる第2工程と、自動充電されたAGV1を自動充電場10内の待機場14に送って待機させ、また待機場14で待機しているバッテリ充電済みAGV1をメインルートMRに復帰進入させる第3工程とを備える。
(もっと読む)
自走式装置誘導システム
【課題】自走式装置と、当該自走式装置を誘導する充電装置又は発光装置と、を備える自走式装置誘導システムにおいて、効率よく自走式装置を充電装置又は発光装置まで誘導することにある。
【解決手段】自走式装置(セキュリティロボット4)に、正面側受光センサCにより光信号Mが受光されるようにセキュリティロボット4を回転させる回転制御プログラム483eを実行したCPU481と、一周期分の光信号Mの受光開始から受光終了までの間に予め設定された複数の判定タイミングで光信号Mの受光状態を判定する判定プログラム483dを実行したCPU481と、を備え、回転制御プログラム483eによって、判定プログラム483dを実行したCPU481により複数の判定タイミングのうちの少なくとも一の判定タイミングで光信号Mを受光していると判定された正面側受光センサCについては、光信号Mを受光しているものと判断するよう構成した。
(もっと読む)
走行車システム
【課題】複数台の走行車が走行制御する走行車システムにおいて、システム全体として走行中の振動対策を行なう。
【解決手段】予め定められた走行レール2を走行する複数の無人搬送車10と有する無人搬送車システム1において、前記無人搬送車10は、振動値を検出する振動検出器21と、現在の走行位置を検出する走行位置検出センサー22と、前記振動検出器21及び前記走行位置検出センサー22によって、所定値(gd)以上の振動値が検出される走行位置を後続する無人搬送車10に通信する通信手段25と、先行する無人搬送車10の前記通信手段25によって所定値(gd)以上の振動値が検出される走行位置を通信されたときは、該位置を走行する時に走行速度を減速せしめる所定レベル減速制御(S100)と、を備える無人走行車システム1。
(もっと読む)
走行車システム
【課題】走行車同士の衝突を確実に防止すると共に、走行車システムの小型化および製造コスト削減に寄与する技術を提供する。
【解決手段】走行車4・4・・・は、当該走行車4の現在位置を把握する走行位置把握手段23と、上位コントローラ5と通信するコントローラ間通信手段21と、当該走行車4の前後を走行する他の走行車4と直接通信する走行車間通信手段22と、走行車間通信手段22による通信の有無を把握する通信有無把握手段24と、を備え、当該走行車4の前方走行車の位置を前記両通信手段21・22により受け取ると共に、走行車間通信手段22による通信があるときには、該走行車間通信手段22による通信により受け取った走行車位置情報を衝突防止制御に用い、走行車間通信手段22による通信がないときには、コントローラ間通信手段21による通信により受け取った走行車位置情報を衝突防止制御に用いる構成とする。
(もっと読む)
1 - 20 / 42
[ Back to top ]