
Fターム[5H303GG08]の内容
位置、方向の制御 (6,897) | 位置検出器の構成 (178) | 磁気又は電磁誘導を利用する手段 (42) | レゾルバ、インダクトシン (12)
Fターム[5H303GG08]に分類される特許
1 - 12 / 12
アクチュエータ用駆動制御装置及びアクチュエータの駆動制御方法
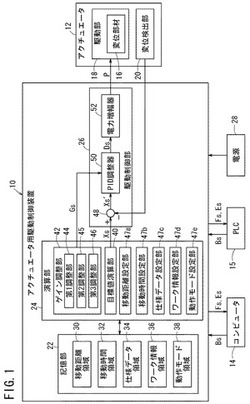
【課題】アクチュエータが備える変位部材の移動距離及び移動時間を設定するだけで、変位部材の詳細な動作を決定し、該変位部材を精度よく変位させる。
【解決手段】アクチュエータ用駆動制御装置10は、変位部材16の移動距離を設定する移動距離領域30と、移動時間を設定する移動時間領域32と、移動距離及び移動時間に基づいて任意のタイミングにおける変位部材16の変位量又は変位速度の目標値を演算する目標値演算部40と、変位部材16の変位量又は変位速度の目標値に基づいて駆動電力Pを生成して、該駆動電力Pをアクチュエータ12に送る駆動制御部26と、を備える。
(もっと読む)
モータ回転制御システム

【課題】手動による煩わしさやミスの発生を無くして、制御手段の誤差データとモータユニットとを正しく適切に対応させるモータ回転制御システムを提供する。
【解決手段】モータ21と、このモータ21の回転角度を検出するレゾルバ22とを含むモータユニット2と、このモータユニット2に対して交換自在な状態で電気的に接続され、レゾルバ22により検出される検出角度と実角度との誤差データ24を用いてレゾルバIの検出角度から実角度を特定し、特定した実角度に基づいてモータ21の回転を制御する制御手段3とを具備してなり、モータユニット2は、誤差データ24を予め記憶するモータ側メモリ23を備え、制御手段3は、実角度の特定時に用いる誤差データ24を記憶する制御側メモリ35を備え、両メモリの記憶に基づいてモータ側メモリ23の誤差データ24を取り込んで、制御側メモリ35へ記憶する。
(もっと読む)
サーボ制御システムおよび作業機械
【課題】機械要素の増加を抑えつつバックラッシュによる影響を低減できるサーボ制御システムおよび作業機械を提供する。
【解決手段】サーボ制御システム80は、回転体4に連結された第1の歯車71と、第1の歯車71と噛み合い、第1の歯車71を駆動する第2の歯車72と、第2の歯車72を駆動する旋回用電動機21と、旋回用電動機21の動作を制御する旋回駆動制御部40とを備え、旋回駆動制御部40は、旋回用電動機21の出力トルクを制限するための旋回制限部41を有しており、旋回制限部41は、旋回用電動機21の静止状態から回転動作への移行、旋回用電動機21の回転速度の減速、または旋回用電動機21の回転方向の変更を行う際に、第1の歯車71及び第2の歯車72におけるバックラッシュ幅を第2の歯車72が移動する際に要する時間に相当する所定時間が経過するまでの間、旋回用電動機21の出力トルクを制限する。
(もっと読む)
ビルトインテスト回路を内蔵したジンバル制御システム
【課題】本発明は、ジンバル制御システムにビルトインテスト回路を設け、このビルトインテスト回路によって励磁信号の有無を検出し、異常時のジンバルの損傷を防止することを目的とする。
【解決手段】本発明によるビルトインテスト回路を内蔵したジンバル制御システムは、ジンバル制御システム(2)にビルトインテスト回路(18)が内蔵され、このビルトインテスト回路(18)により、レゾルバリファレンス出力回路(13)からの励磁信号(14)の有無を検出し、この励磁信号(14)が停止した状態で三相ブラシレスモータ(7)への駆動信号(6)を停止し、ジンバルのストッパへの可動子の衝突を防止し、ジンバルの損傷防止を行う構成である。
(もっと読む)
制御データ発生装置
【課題】自動操作と手動操作が可能な操作子において、自動位置決め完了時の実位置と目標位置との誤差を、その後の手動操作に際して実効的に解消し、違和感のない制御データを発生する。
【解決手段】通常は所定のスケール特性に従う制御データを位置データに応じて発生する。操作子が目標位置Ptに自動位置決めされた直後の手動操作において変更スケール特性を適用する。変更スケール特性においては、位置決め完了時における実位置Prに対応して前記所定のスケール特性上の目標位置Ptに対応する制御データDtが出力されるように起点を設定し、該起点の位置から少なくとも目標位置に達するまでの区間を含む第1の変更区間を設定し、位置検出器12で検出された位置データに対応して発生される制御データが、起点に対応する制御データDtから該第1の変更区間の終点の位置に対応する前記所定のスケール特性上の制御データまで漸次変化するようにする。
(もっと読む)
速度検出装置および位置検出装置および位置決め装置
【課題】安価で簡易な構成によりスライダの位置検出を安定して行うことができるとともに、設計の自由度の高い位置決め装置を実現する。
【解決手段】X軸方向に位置制御されるスライダ1と、このスライダ1と対向する面に磁極の歯が形成されてスライダ1と平面モータを構成するプラテン10とを有するとともに、
スライダ1のX軸方向の位置に応じた信号を出力するレゾルバ30と、スライダ1のX軸方向の加速度を検出する加速度センサ31とを備えた位置検出装置300を備え、
位置検出装置300がレゾルバ30と加速度センサ31の出力に基づいてスライダ1の位置を求めることを特徴とする位置決め装置。
(もっと読む)
位置決め装置
【課題】特定のエリアでは高い位置決め精度を確保しつつ、全体として比較的安価な位置決め装置を提供する。
【解決手段】 位置制御されるスライダ1と、このスライダ1と対向する面に磁極の歯が形成されてスライダ1と平面モータを構成するプラテン10とを備えた位置決め装置において、
スライダ1の位置を検出するレゾルバ30a〜30c(以下レゾルバ30とする。)と、
プラテン10の特定のエリアAにおけるスライダ1の位置をレゾルバ30よりも高い精度で検出するレーザ干渉計20a,20b(以下レーザ干渉計20とする。)と、
スライダ1の位置に応じてレゾルバ30またはレーザ干渉計20のいずれかの位置検出装置を選択する切替スイッチ100cと、
位置指令値および切替スイッチ100cで選択された位置検出装置で検出される位置検出値に基づいてスライダ1の位置制御を実行する位置制御部102と、
を備えたことを特徴とする位置決め装置。
(もっと読む)
位置決め装置
【課題】安価で簡易な構成によりスライダの位置検出を安定して行うことができるとともに、設計の自由度の高い位置決め装置を実現する。
【解決手段】互いに直交するX軸およびY軸の少なくとも1軸方向に位置制御されるスライダ1と、このスライダ1と対向する面に磁極の歯が形成されてスライダ1と平面モータを構成するプラテン10とを備えた位置決め装置において、
スライダ1の1軸方向の位置を検出するレゾルバ2と、
このレゾルバ2のスライダ1の進行方向側に隣接して配置されたレゾルバ2a,2bと、
このレゾルバ2a,2bの出力に基づいてレゾルバ2の出力を補正する補正部と、
この補正部からの出力に基づいてスライダ1の位置を算出する位置算出部と、
を備えたことを特徴とする。
(もっと読む)
位置決め装置
【課題】安価な構成により高精度でかつ短時間に原点復帰を行うことができる位置決め装置の実現を実現する。
【解決手段】X軸方向およびY軸方向に位置制御されるスライダ200,300と、このスライダ200,300と対向する面に磁極の歯が形成されてスライダ200,300と平面モータを構成するプラテン10とを備えた位置決め装置において、
スライダ200,300に設けられ、スライダ200,300のプラテン10に対する位置を検出するX軸レゾルバおよびY軸レゾルバと、
X軸レゾルバおよびY軸レゾルバで得られる位置検出信号に基づいて、スライダ200,300をプラテン10上に設定された原点位置にサーボ制御する原点復帰制御部402と、
を備えることを特徴とする。
(もっと読む)
ジンバル軸受の摩擦を制限するようにフレックスピボットを有するジンバルサーボシステム用軸受組立体
ジンバルサーボシステムへの使用に適した支承組立体が提供される。支承組立体は、ハウジングと、第1のシャフトと、第1のシャフトがハウジングに対して軸線回りに回転するように第1のシャフトをハウジングに回転可能に結合する軸受と、ペイロードに結合されるようになった第1の端部を有する第2のシャフトと、フレックスピボット要素とを有し、このフレックスピボット要素は、第2のシャフトがフレックスピボット要素を介して第1のシャフトに対して回転するよう第1のシャフトの端部を第2のシャフトの第2の端部に回動可能に結合する。第2のシャフトの回転に応答して、フレックスピボット要素は、第1のシャフトの軸線回りに所与の角度回動するようになっている。回動角度は、第1のシャフトに対する第2のシャフトの変位を反映し、軸受の摩擦外乱に対応する。  (もっと読む)
(もっと読む)
位置決め装置
【課題】 位置決め完了後のフィードバック位置の1パルス変動を抑制するとともに、現在の高逓倍回路にも適用することができる完全静止技術を実現することができる位置決め装置を提供する。
【解決手段】 位置検出器の2相アナログ信号からパルス信号を生成するパルス生成器(5)と、パルス信号をカウントし位置信号を生成する位置カウンタ(6)と、位置指令と位置信号に基づいて制御対象を制御する位置制御部(1)と、を備えた位置決め装置において、2相アナログ信号から速度信号を生成する速度信号生成部(7)と、速度信号と位置信号に基づいて位置補正信号を生成し、位置信号に加算して補正位置信号を生成する位置信号補正部(8)と、を備えた。
(もっと読む)
平面位置決め装置
【課題】 レーザ測長器等の絶対位置測定手段を外部に配置することなく、ライダの原点絶対位置情報を取得することができる平面位置決め装置を実現する。
【解決手段】 X軸方向及びY軸方向に多重化された推力発生用モータコアを有するスライダを、プラテンの上面でX軸方向またはY軸方向にスライドして位置決め制御する平面位置決め装置において、
前記スライダの原点復帰時に、前記多重化されたモータコアのコア巻線を、前記プラテンに形成された歯と前記モータコアに形成された歯との相対位置を検出するレゾルバ型位置検出手段のセンサーとして使用する。
(もっと読む)
1 - 12 / 12
[ Back to top ]