
Fターム[5H501GG20]の内容
Fターム[5H501GG20]に分類される特許
1 - 20 / 32
アクチュエータ制御装置及び方法
モータを制御するための方法およびシステム
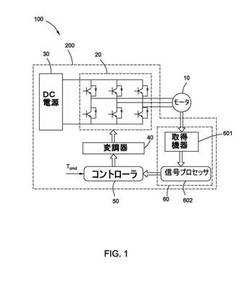
【課題】DCバス電圧利用率を確保するために、可能な限り大きなモータトルクを確保する電圧振幅および電圧位相角の適した点を迅速に決定する方法およびシステムを提供する。
【解決手段】モータ10を制御するための方法は、モータの電気信号を信号ユニット60によって入手するステップを含む。電気信号は、モータトルクおよび角速度を含む。電圧ベクトルの電圧位相角を計算機器によって計算するステップをさらに含む。コマンドトルクTcmd、モータトルク、角速度、および電圧ベクトルの電圧振幅が、計算機器の入力である。方法は、インバータ20を制御するスイッチング信号へと電圧位相角および電圧振幅を変調器40によって変調するステップをさらに含む。方法は、スイッチング信号にしたがって電圧ベクトルへと直流電圧をインバータによって変換するステップ、およびモータへ電圧ベクトルを印加するステップをさらに含む。
(もっと読む)
モータの異常診断装置

【課題】簡単な構成でモータに発生したガタ等の異常を正しく診断することができるモータの異常診断装置を提供する。
【解決手段】モータ10に駆動信号を出力するモータドライバ20と、モータの回転速度を検出する回転速度検出センサ30と、モータドライバに指令信号を出力するコントローラ22とを備え、コントローラ22は、モータの回転を周期的に変化させる異常診断指令信号を出力し、異常診断指令信号によってモータドライバを介してモータの回転が周期的に変化したときの回転速度検出センサからの回転速度検出信号を時系列的に順次取り込み、取り込まれた回転速度検出信号に基づき、異常の診断を行う。
(もっと読む)
制振制御装置及び制振制御方法
【課題】制御ループの高い安定性を確保することができる制振制御装置を提供する。
【解決手段】車両に設けられたモータを制振させる制振制御装置において、第1フィルタを用いて、車両の車両情報に基づいて、第1トルク目標値を設定する第1トルク目標値設定手段と、モータの回転速度を検出するモータ回転速度検出手段と、第2フィルタを用いて、モータ回転速度検出手段により検出された検出回転速度に基づいて、第2トルク目標値を設定する第2トルク目標値設定手段と、第1トルク目標値設定手段により設定された第1トルク目標値と、第2トルク目標値設定手段により設定された第2トルク目標値とを加算して、トルク指令値を算出する第1加算手段と、第1加算手段により算出されたトルク指令値に基づき、モータを制御するモータ制御手段とを備え、第2フィルタの制御定数は、車両の駆動系の固有振動周波数より低い周波数に基づいて設定されている。
(もっと読む)
モータ駆動装置
【課題】速度制御から位置制御への切替をシームレスに行い、機械伝達系に衝撃を与えないモータ駆動装置を提供する。
【解決手段】モータ駆動装置から前記上位コントローラ1への伝送遅れ時間の間のモータ移動量と、前記上位コントローラからモータ駆動装置への伝送遅れ時間の間のモータ移動量と、前記上位コントローラ1からモータ駆動装置への伝送遅れ時間の間のモータ移動量とを現在位置35に加算して前期の速度制御時指令位置37とし、速度制御から位置制御への切替時において、前回の前記速度制御時速度指令28から算出される位置偏差量を位置偏差24の初期値とするとともに、前記位置指令生成手段2において、前記位置偏差量を現在位置35に加算したものを位置制御時指令位置36の初期値として設定した後、前記目標位置指令21による位置制御を行うモータ駆動装置である。
(もっと読む)
モータ制御装置
【課題】動作中に振動特性が変化する制御対象に対する振動抑制制御の精度を向上できるモータ制御装置を得ること。
【解決手段】モータ1a及び振動可能要素1bを有する制御対象1の動作を制御して、制御対象の動作を動作目標値に追従するようにモデルトルクτaを生成するフィードフォワード制御部111と、モデルトルクに応じてトルク指令τMを発生させる発生部とを備え、フィードフォワード制御部は、制御対象の振動関連情報に応じて、振動特性を表す振動パラメータθを生成する生成部と、振動パラメータに応じて、動特性を模擬した数式モデル121を変更し、モデルトルクから変更された数式モデルにより、制御対象の動作状態を含むモデル変数を演算する第1の演算部と、モデル変数が一定の追従特性で動作目標値に追従するように、振動パラメータに応じて特性を変化させた演算によりモデルトルクを演算する第2の演算部とを有する。
(もっと読む)
ピンチロールの速度制御装置及び速度制御システム
【課題】ピンチロールの速度制御において、操業中にピンチロールモータの速度制御系の不安定化によるハンチングを抑制することを目的とする。
【解決手段】ピンチロールの速度目標値と張力バランス目標値とを入力信号とし、第1のPI制御器を用いてピンチロールの補正速度目標値を出力する主幹制御部と、該補正速度目標値とピンチロールの速度実績値との第1の差分値を求め、該差分値を入力として第2のPI制御器によりピンチロールモータを駆動する電流指令値を求めるドライブ部とを具備し、主幹制御部は、張力バランス目標値と電流指令値との第2の差分値を求め、該第2の差分値を第1のPI制御器に入力し、その出力をローパスフィルタに入力し、該ローパスフィルタの出力と速度目標値とから補正速度目標値を出力する。
(もっと読む)
制御装置
【課題】 本発明は、例えばモータに自動車のエンジンの動作を模擬させたシステムにおけるモータの制御等、制御対象物の制御を行なう制御装置に関し、制御系の遅れ時間を高精度に補償した制御を行なう。
【解決手段】 制御対象物の動作速度を第1の角度に変換し、制御系の遅れ時間に相当する時間をその動作速度に応じた第2の角度に変換し、第1の角度と第2の角度とを加算して第3の角度を生成し、その第3の角度を、その制御対象物の制御対象要素を指令値通りに制御するための指令値に変換して、その指令値に基づいて制御対象物を制御する。
(もっと読む)
サーボ制御器
【課題】2自由度制御構成のサーボ制御器において、用いる位置検出器の分解能が低くてもフィードフォワード制御器からフィードバック制御器へ与える操作量に生ずるリップルを確実に低減でき、高い追従性による高精度制御を可能にするサーボ制御器を得ること。
【解決手段】指令生成器10は入力される位置指令Aをコントローラ2の分解能から位置検出器5の分解能よりも高い分解能の内部位置指令150へ変換する。フィードフォワード制御器11aは、内部位置指令150を元に微分器110、フィルタ111を用いて速度フィードフォワード成分152を生成し、それを元に微分器112、フィルタ113を用いてトルクフィードフォワード成分154を生成する。内部位置指令150の分解能は位置検出器5の分解能よりも高いので、フィードフォワード成分152,154に生ずるリップルは位置検出器5の分解能を有する内部位置指令を用いる場合よりも低減される。
(もっと読む)
モータ制御装置
【課題】高速且つ高精度に駆動対象を所望状態に移行させることが可能なモータ制御技術を提供する。
【解決手段】制御システム1のモータ制御ユニット60は、第一制御ユニット70及び第二制御ユニット80を備え、制御プロセス初期においては、第一制御ユニット70から出力される電流指令値U1をモータドライバ30に入力し、制御プロセス後期においては、電流指令値U1に代えて、第二制御ユニット80から出力される電流指令値U2を、モータドライバ30に入力する。第一制御ユニット70は、逆起電力による電流低下を加味して電流上限値Umaxを推定し、これを電流指令値U1として出力するものであり、モータ20の高速駆動を実現する。一方、第二制御ユニット80は、フィードバック制御系及びフィードバック制御系から構成され、制御プロセス後期において動作して、モータ20を高精度に駆動制御し、高精度に駆動対象を目標とする状態に移行させる。
(もっと読む)
モータの駆動装置、駆動方法および入力装置
【課題】所望の振動波形を実現するモータの駆動装置およびこれを用いた入力装置を提供する。
【解決手段】入力装置100は、タッチパネル(入力操作部)1と、入力判定部2と、モータの駆動装置(駆動装置)3と、モータ4と、振動部5とを備えている。また、駆動装置3は、目標波形生成部11と、加速度センサ(振動検出部)12と、波形整形部13と、増幅部(駆動信号生成部)14とを有する。振動部5の実際の振動波形を検出する加速度センサ12を設け、実振動波形が目標振動波形に近づくよう、フィードバック制御を行う。そのため、より正確に目標とする振動波形を実現できる。
(もっと読む)
直列弾性アクチュエータの力およびインピーダンスのロバスト制御のための構成
【課題】力誤差を計算することなく、または、直接的に弾性SEA素子をひずみゲージで測定することなく、SEAにより付与されるトルクを制御するためのSEA構成に関する。
【解決手段】SEA構成30は、弾性バネ36の一端部に連結されるモーター32と、弾性バネの反対側の端部に連結される負荷38とを有する。モーターはバネを通じて負荷を駆動する。モーターのシャフトおよび負荷の向きは、位置センサにより測定される。位置センサからの位置信号は、埋め込みプロセッサ44に送られ、モーターシャフトに対する負荷の向きを決定し、バネ上のトルクを決定する。埋め込みプロセッサは、リモートコントローラ46から参照トルク信号を受け取る。埋め込みプロセッサは、所望のジョイントトルクについて高速サーボループを動作させる。リモートコントローラは、インピーダンスまたは位置決め目標物により高次の目標物に基づいてジョイントトルクを決定する。
(もっと読む)
位置制御装置
【課題】速度制御系をマイナーループに、位置制御をメジャーループに持つ位置制御では、高応答にするための調整が困難となっている。
【解決手段】位置制御部にフィードフォワード部を設ける。位置制御部に入力されるステップ状の角度指令θrefと制御対象物の角度検出θdetから比の伝達関数を次式で求める。
θdet/θref={KIω(FFθ+KPθ)}/{Jdys3+(KPω+Ddy)
s2+KIωs+(KIω*KPθ)}
フィードフォワード部のパラメータFFθを、上式の分子多項式の零点=分母多項式の定数項としてKIω(FFθ+KPθ)=KIω*KPθからFFθ=0
として求める。
(ただし、KPθは位置制御部の比例パラメータ、KPω,KIωは速度制御部の比例及び積分パラメータ、Jdyはモータ慣性、Ddyは回転損失s)
(もっと読む)
サーボ制御装置
【課題】送り機構のボールスクリューが経年変化や温度変化で伸縮してボールスクリューの軸方向に沿う剛性が変化しても、このような剛性変化を補償して、テーブルの位置を正確にサーボ制御する
【解決手段】制御部100は、サーボモータ40をフィードバック制御して、負荷であるテーブル02をサーボ制御する。逆特性モデル300は、機械系の動的誤差を補償する速度補償信号V300を求めて、フィードフォワード補償制御をする。剛性変化補償部400は、ボールスクリュー30のネジ部31の軸方向に沿う剛性が変化したら、この剛性変化に応じて、逆特性モデル300の補償制御用伝達関数に含まれているネジ部の軸方向に沿う剛性値を変化させる。
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置およびそれを備えた車両用操舵装置を提供する。
【解決手段】仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は、制御上の回転角である制御角θCに従う座標系である。制御角θCとロータ角θMとの差(負荷角θL)に応じたアシストトルクが発生する。一方、検出操舵トルクTを指示操舵トルクT*に近づけるように、PI制御部23によって、加算角αが生成される。加算角αが制御角θCの前回値θC(n-1)に加算されることにより、制御角θCの今回値θC(n)が求められる。ゲイン変更部40は、PI制御部23の比例ゲインKPを、γ軸指示電流値Iγ*が大きいほど小さくなる特性に従って可変設定する。
(もっと読む)
電動機制御装置と予測制御方法
【課題】機械にあわせてフィードフォワード量を調整して指令に追従させ、制御演算を簡易にして、加減速時のオーバシュートを減らし、一定速度時の追従性を高めた電動機制御装置と予測制御方法を提供する。
【解決手段】位置指令をサンプリング時間毎に保存する位置指令差分バッファ部(21)と、位置指令差分バッファ部の位置指令と電動機位置の位置偏差に基づいて速度指令を生成する予測演算部(22)とを備え、位置指令差分バッファ部は、速度フィードフォワードのみ使用する場合は2段し、トルクフィードフォワードを使用する場合は4段とした。
(もっと読む)
駆動装置及び電子機器
【課題】フィードバック制御からオープンループ制御に切り替える際に脱調を防止又は低減する駆動装置及び電子機器を提供する。
【解決手段】ステッピングモータのロータの回転位置を検出する位置センサ30a、30bを設け、高精度な位置決めが可能なオープンループ制御と高速駆動が可能なフィードバック制御とを切り替える駆動装置は、フィードバック制御からオープンループ制御に切り換える前に、フィードバック制御における現在の進角α0をオープンループ制御において脱調が発生しない目標の進角α4に変更する。
(もっと読む)
粘性摩擦同定装置を備えたモータ制御装置
【課題】モータ速度がノイズを多く含む場合にもノイズの粘性摩擦同定精度に与える影響を除去することができ、微小動作のみで粘性摩擦同定をすることができる粘性摩擦同定装置を備えたモータ制御装置を提供する。
【解決手段】入力指令が複数の周波数成分を含む周期信号であって、粘性摩擦同定装置107が、前記入力指令の複数の周波数成分におけるトルク指令と、前記入力指令の複数の周波数成分における前記モータ位置とに基づいて、粘性摩擦同定値を演算するものである。
(もっと読む)
慣性モーメント同定器を備えたモータ制御装置
【課題】 柔軟な負荷の連結した制御対象に対し産業用機械の慣性モーメント同定を、小ストロークで精度良く短時間に実施するとともに、簡単な数式により廉価で性能のやや劣るドライバを用いた産業用機械のモータ側および負荷側の慣性モーメント同定と、その同定結果を用いた動作制御をすることができるモータ制御装置を提供する。
【解決手段】 慣性モーメント同定器107は、入力指令の特定の周波数である指令周波数を算出し出力する指令周波数演算器108と、トルク指令のフーリエ係数であるトルク指令フーリエ係数を算出し出力するトルク指令フーリエ係数演算器109と、モータ位置のフーリエ係数であるモータ位置フーリエ係数を算出し出力するモータ位置フーリエ係数演算器110と、前記指令周波数および前記トルク指令フーリエ係数並びに前記モータ位置フーリエ係数に基づいて、慣性モーメント同定値を算出し出力する慣性モーメント演算器111と、を備える。
(もっと読む)
モータを用いた駆動系の捩り振動制振制御方法
【課題】機差に応じた補正を行って効果的な捩り制振を行う方法を提供する。
【解決手段】動力源から車輪に到る駆動系にモータが含まれるとともに、その駆動系を捩り振動系としてモデル化した捩り振動モデルにおける捩り振動を抑制するために予め用意した数式モデルに基づいて前記モータをフィードフォワード制御することにより前記駆動系における捩り振動を抑制する、モータを用いた駆動系の捩り振動制振制御方法において、前記捩り振動系における前記モータを除いたいずれかの回転角度を基準とし、その基準となる回転角度の変化量に対する前記モータの回転角度の変化量の比の設計値と実測値との偏差Δαを求め、その偏差に基づいて、前記数式モデルにおける捩り変位を抑制する係数の設定値を補正する。
(もっと読む)
1 - 20 / 32
[ Back to top ]