
Fターム[5H501JJ26]の内容
Fターム[5H501JJ26]に分類される特許
1 - 20 / 241
モータ制御装置
電力変換装置
電動機制御装置
モータ駆動制御装置及び集積回路装置
冷却ファン、制御方法及び電子機器
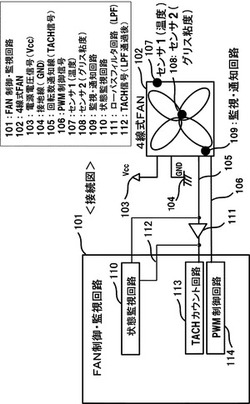
【課題】 冷却ファンなどの寿命部品における保全情報を利用する技術を提供する。
【解決手段】 寿命を予測するために必要な寿命情報を収集するセンサと、この前記寿命情報を他の情報のための信号線に重畳して送出する監視・通知手段とを備える冷却ファンと、前記信号線から前記寿命情報の成分を除くフィルタと、前記寿命情報に基づいて、冷却ファンの寿命を予測する状態監視手段とを備える電子機器。また、寿命を予測するために必要な寿命情報を収集するセンサと、前記寿命情報を他の情報のための信号線に重畳して送出する監視・通知手段とを備える冷却ファン。
(もっと読む)
制振制御装置

【課題】フィルタへの余剰トルク成分の蓄積を抑制する制振制御装置を提供する。
【解決手段】車両に設けられたモータを制振させる制振制御装置において、車両の車両情報を入力として、車両へのトルク入力と前記モータの回転速度の理想伝達特性のモデルGm(s)と、車両へのトルク入力とモータの回転速度の実伝達特性のモデルGp(s)とを用いたモデルGm(s)/Gp(s)を含むフィルタにより第1トルク目標値を算出する第1トルク目標値算出手段と、モータの回転速度を検出するモータ回転速度検出手段と、モデルGp(s)を含むフィルタを用いて、トルク指令値及び回転速度検出手段により検出された検出回転速度に基づいて、第2トルク目標値を算出する第2トルク目標値算出手段と、第1トルク目標値と前記第2トルク目標値とを加算してトルク指令値を算出する加算手段と、トルク指令値に基づいて、モータを制御するモータ制御手段とを備える。
(もっと読む)
駆動装置
【課題】モータの制御性を高くすることや車両の挙動をより適正なものとする。
【解決手段】カットオフ周波数Fc以上の周波数成分を減衰させるローパスフィルタ処理を電流センサにより検出されたバッテリの充放電電流Ibに施して得られるフィルタ後電流FIbをモータの制御に用いるものにおいて、モータの回転数Nmが昇圧コンバータを含む回路の共振回転数領域(下限回転数N1〜上限回転数N2の領域)外のときには(S110)、所定周波数Fc1をカットオフ周波数Fcに設定する(S120)。一方、モータの回転数Nmが共振回転数領域内のときには(S110)、所定周波数Fc1より小さな所定周波数Fc2または所定周波数Fc3をカットオフ周波数Fcに設定する(S130〜S150)。
(もっと読む)
共振抑制装置及び共振抑制方法
【課題】共振周波数の変化に関して注意を促す。
【解決手段】本発明のある態様は、共振抑制装置に関する。この装置は、制御系の共振を抑制するために当該制御系に設けられているノッチフィルタと、ノッチフィルタの中心周波数を制御系の共振周波数に一致させるようにノッチフィルタのフィルタ係数を更新するためのフィルタ係数調整部と、を備える。フィルタ係数の更新処理は、ノッチフィルタの既存の中心周波数を基準とする前記共振周波数の変動量が許容範囲にあるか否かを判定することと、変動量が許容範囲外にあると判定される場合には警告を出力することと、を含む。
(もっと読む)
異常検出装置
【課題】 サーボモータによって駆動される被駆動部の異常部位を特定可能な異常検出装置を提供する。
【解決手段】 本発明の異常検出装置は、サーボモータの位置情報が位置検出器から入力される入力部と、位置情報を周波数変換する周波数変換部と、周波数変換された所定周波数における振幅と被駆動部の異常を判定する閾値とを比較する比較判定部と、を有し、比較判定部は、所定周波数における振幅が被駆動部の異常を判定する閾値以上となる周波数から被駆動部の異常部位を特定する。
(もっと読む)
電動過給機の異常検出装置と検出方法
【課題】電動機の経時劣化を迅速かつより正確に検出する電動過給機の異常検出装置と異常検出方法を提供することを目的とする。
【解決手段】電動機によりコンプレッサを駆動して内燃機関の過給を行う電動過給機の異常検出装置であって、直流電源から前記電動機に供給される電力または電流に対して、電動機の定格回転速度を定める電動機定格回転速度導出手段(61,62)と、前記定格回転速度と実回転速度との差分が閾値以上の場合に異常検出信号を発生する異常有無判定手段(63)と、を備える。
(もっと読む)
誤差周波数成分取得装置、回転角度取得装置、モータ制御装置および回転角度取得方法
【課題】レゾルバを用いてロータ回転角度を検出する装置において、調整者の負担を軽減しつつ、誤差の小さいロータ回転角度を得られるようにする。
【解決手段】角度測定値取得部210が、モータ軸の回転角度測定値を取得し、誤差算出部220が、複数の回転角度測定値の各々に含まれる誤差を算出する。そして、周波数成分取得部230が、複数の誤差から、誤差の周波数成分の位相および振幅を求める。これによって、誤差周波数成分取得装置121は、回転角度測定値に含まれる誤差の周波数成分の位相および振幅を自動的に算出することができ、当該位相および振幅を用いて回転角度測定値に対する補正を行うことができる。従って、調整者の負担を軽減しつつ、誤差の小さいロータ回転角度を得ることができる。
(もっと読む)
電動機制御装置
【課題】駆動機構における慣性モーメント又は慣性質量、及び多慣性モデルのいずれも未知もしくは変動し得る場合でも、各種パラメータを調整することなくロバスト性の高い電動機の駆動制御を可能にする。
【解決手段】電流制御系ループにおいて、慣性変動抑制部3が第1外乱オブザーバ31を用いて推定した電動機200の外乱トルクを、第1トルク指令に加算して第2トルク指令を出力する。また、慣性変動抑制部3において外乱トルクを推定する第1外乱オブザーバ31が、電動機200の電動機速度に対応して駆動機構500の機械共振の影響を抑制した理想電動機の加減速トルク信号を出力する共振抑制モデル43を備えている。第1外乱オブザーバ31が、この理想電動機の加減速トルク信号を利用して外乱トルクを推定することで、慣性変動抑制部3は駆動機構500の機械共振に起因する振動を生じることなく駆動機構の慣性モーメントの変動を抑制する。
(もっと読む)
モータ駆動装置及びこれを備えたポンプ
【課題】高速で細かな回転数制御ができる上にスイッチングロスを低減することができるものとする。
【解決手段】モータ出力レベルについての指示が入力される指示入力部2と、前記指示入力部に入力された指示入力に応じて出力される信号レベルに応じてモータ電圧を制御するモータ電圧制御部40と、前記指示入力部から出力される信号レベルに応じて前記モータの動作をPWM制御するモータ制御部6とを有する。上記モータ電圧制御部40はPWM制御のデューティ比が所定の値以下となるときにモータ電圧を下げる。
(もっと読む)
モータ駆動装置
【課題】簡易的かつ安価な回路構成でモータのソフトスタート制御が可能なモータ駆動装置を提供する。
【解決手段】モータ駆動装置1は、モータ2を駆動する駆動電流Icの向きを制御する制御回路部10と、駆動電流Icを検出する電流検出回路3と、モータ2の回転数を定常回転数まで増加させる起動時に、駆動電流Icの増加速度を電流検出回路3と協働して抑制する電流制限調整回路20とを備えている。電流制限調整回路20は、好ましくは、起動時に駆動電流Icが流れるスイッチ回路22と、起動時にスイッチ回路22を流れる駆動電流Icを時間経過とともに増加させる時定数回路21とを含んでいる。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】演算用モータ抵抗値の算出精度を向上させることができるモータ制御装置及び電動パワーステアリング装置を提供する。
【解決手段】モータ12を制御するECU11は、モータ12に流れる電流検出値Ieを検出する電流値検出部31と、モータ12に印加される端子間電圧Vtを取得する入力電圧設定部37と、電流検出値Ie及び端子間電圧Vtに対してフィルタ処理を施すフィルタ部40と、モータ12で発生する誘起電圧Eを算出する誘起電圧推定部43と、デューティ比微分値ΔDを算出する変化量算出部41と、フィルタ後電圧値Vtfをフィルタ後電流値Iefで除算してモータ12の今回の抵抗算出値Re(n)を求める抵抗算出部72と、誘起電圧Eが基準値以下であると共に、デューティ比微分値ΔDが基準変化量以下である場合に、今回の抵抗算出値Re(n)に基づき今回の演算用モータ抵抗値R(n)を設定する抵抗設定部73と、を備える。
(もっと読む)
モータ制御装置およびこれを備える電動パワーステアリング装置
【課題】算出するモータの抵抗値と実際のモータの抵抗値との差をより短い期間で小さくすることのできるモータ制御装置、およびこれを備える電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、ステアリングの操舵状態が保舵状態のとき、過去に算出したモータ抵抗値Rmに応じて算出されるフィルタ値Rfを用いたフィルタ処理により、モータ抵抗値Rmを算出する。また、前回の保舵状態において算出したフィルタ値Rfである前回フィルタ値Rfoldを今回の保舵状態において算出されるモータ抵抗値Rmに反映する補正係数Gを、回転状態のときの電流積算値に基づいて変更する。
(もっと読む)
フィードバック制御系の振動検出装置及び振動検出装置を備えたモータ制御装置
【課題】モータまたは負荷の慣性モーメントの値がずれても振動状態を精度良く検出し、素早く異常を察知して騒音や機械系の損傷等を防止することができるフィードバック制御系の振動検出装置および振動検出装置を備えたモータ制御装置を提供する。
【解決手段】負荷を連結したモータを制御対象とする制御装置の振動検出装置であって、制御装置は、制御対象をフィードバック制御してモータを制御する制御器部と、制御装置の出力の上下限ピーク値とそれらの発生時刻に基づいて、振動の発生を判断する振動状態判断部と、を備えた。
(もっと読む)
電力変換装置
【課題】新たな部品を追加することなくモータの巻線間のサージ電圧を抑えられる電力変換装置を提供する。
【解決手段】インバータ回路10の浮遊容量C11と、インバータ回路10とモータM1を接続する配線の寄生インダクタンスL10と、モータM1の巻線のインダクタンスLm1と、モータM1の浮遊容量C10とによって構成されるLC共振回路の共振周波数が、インバータ回路10の出力可能な周波数のうち、所定周波数範囲以外の周波数となるように、寄生インダクタンスL10及び浮遊容量C11の少なくともいずれかが調整されている。寄生インダクタンスL10と、浮遊容量C10を利用して、従来のようなフィルタ回路を構成する。そのため、新たな部品を追加することなくコモンモード電流を抑えることができる。しかも、LC共振回路の共振によるコモンモード電流の増大を抑えられる。従って、車両駆動用モータM1の相巻線間のサージ電圧を抑えられる。
(もっと読む)
制振制御装置及び制振制御方法
【課題】制御ループの高い安定性を確保することができる制振制御装置を提供する。
【解決手段】車両に設けられたモータを制振させる制振制御装置において、第1フィルタを用いて、車両の車両情報に基づいて、第1トルク目標値を設定する第1トルク目標値設定手段と、モータの回転速度を検出するモータ回転速度検出手段と、第2フィルタを用いて、モータ回転速度検出手段により検出された検出回転速度に基づいて、第2トルク目標値を設定する第2トルク目標値設定手段と、第1トルク目標値設定手段により設定された第1トルク目標値と、第2トルク目標値設定手段により設定された第2トルク目標値とを加算して、トルク指令値を算出する第1加算手段と、第1加算手段により算出されたトルク指令値に基づき、モータを制御するモータ制御手段とを備え、第2フィルタの制御定数は、車両の駆動系の固有振動周波数より低い周波数に基づいて設定されている。
(もっと読む)
車両用駆動制御装置
【課題】駆動系の機械共振を適切に抑制する。
【解決手段】アクセル開度および速度に基づく要求駆動力に応じて走行用モータに対するトルク指令を出力するトルク指令生成部41と、トルク伝達系の固有振動周波数成分を減衰させるようにして、トルク指令に減衰フィルタ処理を行なって処理後のトルク指令を出力するトルク指令ノッチフィルタ42と、処理後のトルク指令に応じたトルクを発生させるように走行用モータを制御する動力指示部と、調整パラメータ演算部43とを備え、調整パラメータ演算部43は、走行用モータの回転数が所定回転数以下かつトルクが所定トルク以上である場合にトルク指令ノッチフィルタ42の減衰フィルタ処理の減衰特性を同定する。
(もっと読む)
1 - 20 / 241
[ Back to top ]