
Fターム[5H505EE01]の内容
交流電動機の制御一般 (51,584) | 電動機の制御方法 (6,264) | 正逆転制御を行うもの (76)
Fターム[5H505EE01]に分類される特許
1 - 20 / 76
電動弁駆動システム
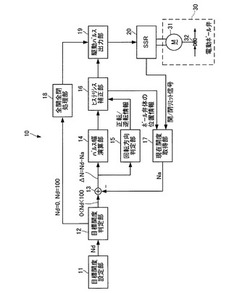
【課題】無駄なエネルギー消費を抑制し、簡単な構成で電動弁を駆動することができる電動ボール弁駆動システムを提供する。
【解決手段】電動ボール弁駆動システム10は、目標開度Ndを設定する目標開度設定部11と、目標開度Ndとボール弁32の現在開度Naとを入力して両者間の開度差分ΔNを求める加算部13と、開度差分ΔNに基づいて単相誘導電動機31を駆動する駆動パルス幅を演算するパルス幅演算部14、ボール弁32のヒステリシス相当駆動時間を求めて駆動パルス幅を補正するヒステリシス補正部16と、求めた駆動パルス幅を有する駆動パルスをSSR20に出力する駆動パルス出力部19と、駆動パルスを単相誘導電動機31に出力し、単相誘導電動機31を駆動するSSR20と、を備える。
(もっと読む)
電動機の駆動制御方法

【課題】モータに所定以上の負荷が作用したまま負荷保持動作に移行している間、各相コイルの発熱温度を均一化するように駆動制御する電動機の駆動制御方法を提供する。
【解決手段】制御回路7はモータコイル3に通電状態で、かつモータ負荷が所定負荷以上で負荷保持状態に移行し、当該負荷保持状態に移行している間、任意のロータ回転位置から所定電気角±((180/n)°;nは相数)だけ正逆回転する動作を繰り返す。
(もっと読む)
インバータホイストの駆動制御装置及びインバータホイストの駆動制御方法
【課題】電源電圧が低下した場合や電動機の電圧特性により定格速度で出力電圧が飽和した場合でも、比較的簡易な処理で荷重の落下を回避し、安定したベクトル制御が可能なインバータホイストの駆動制御装置及びインバータホイストの駆動制御方法を提供する。
【解決手段】電源電圧低下などによる出力電圧飽和(過変調)を検出したとき、運転速度指令を、所要トルクを出力することができる周波数まで低減することで、誘導電動機2の運転速度を低減する。これにより、低速から高速までの全領域において、ホイストとしての機能を損ねることなく、安全でかつベクトル制御の持つ性能を十分に活用することが可能となる。
(もっと読む)
単相誘導モータの駆動制御装置
【課題】サーマルプロテクタが開動作したことを正確に判定することが可能な単相誘導モータの駆動制御装置を提供する。
【解決手段】交流電源(1)の電圧を監視して、対応する第1の電圧(V1)を出力する第1の電圧監視手段(15)と、進相コンデンサ(7)の両端電圧を検出して、対応する第2の電圧(V2)を出力する第2の電圧監視手段(17)と、第1、第2の電圧(V1、V2)を比較する比較回路(49)と、を備える。第1の電圧監視手段(15)及び第2の電圧監視手段(17)は、サーマルプロテクタ(11)が作動していないとき及び交流電源(1)がオフされたときに第1、第2の電圧(V1、V2)が第1の大小関係(V1>V2)を満たし、サーマルプロテクタ(11)が作動したときに第1、第2の電圧(V1、V2)が第1の大小関係とは異なる第2の大小関係(V1<V2)を満たすように構成される。
(もっと読む)
電動パワーステアリング装置
【課題】センサレス制御を行う場合において、操舵フィーリングの低下を抑制する。
【解決手段】不感帯処理部112は、誘起電圧演算部111で算出した演算誘起電圧e’を入力し、不感帯変更部113から出力される不感帯指定信号Sにしたがって、操舵トルクTrの大きさが設定トルクTr0よりも大きい場合には、不感帯処理マップを参照して演算誘起電圧e’の不感帯処理を行い、操舵トルクTrの大きさが設定トルクTr0以下の場合には、演算誘起電圧e’の不感帯処理を行わない。従って、保舵時において操舵ハンドルが振動しない。また、操舵ハンドルを切り出すときには、推定電気角が固定されないため、操舵操作の引っ掛かり感がなくなる。
(もっと読む)
電動パワーステアリング装置
【課題】センサレス制御を行っているときに、モータの脱調を良好に検出する。
【解決手段】脱調判定部117は、操舵トルクセンサ21により検出した操舵トルクTrの大きさが予め設定された設定トルクより大きく、かつ、γ軸誘起電圧演算部116で算出したγ軸誘起電圧の大きさが予め設定された設定電圧より大きいときに、モータが脱調している判定する。モータの脱調が判定されたとき、加算量ガード処理部118は、電気角加算量Δθの上限値を設定する電気角加算量ガードΔθgを徐々に低減する。これにより、推定電気角θebの進む速度が遅くなり、モータが同期する。
(もっと読む)
電動車両の電動機駆動システム
【課題】電動車両の電動機駆動システムにおいて、必要な運転性を確保しつつ、システムの電力損失抑制による燃費改善を図る。
【解決手段】直流電圧変換のためのコンバータおよびコンバータの出力電圧を交流電圧に変換するインバータを含んで構成される電動車両の電動機駆動システムにおいて、制御装置は、電動車両がトルク高応答を必要とする車両状態であるかどうかのトルク応答要求判定を実行する(S100)。さらに、制御装置は、トルク高応答が必要であるドライバビリティ優先モードでは(S110のYES判定時)、正弦波PWM制御が適用される範囲に、コンバータの電圧指令値を設定する(S200)。一方、トルク高応答が必要な状態ではない燃費優先モードでは、交流電動機の運転状態に基づいて、電動機駆動システム全体での電力損失が最小となるように、コンバータの電圧指令値を設定する(S150)。
(もっと読む)
駆動制御装置
【課題】 インバータ内部でショート故障が発生した際に効率的なモータの駆動継続が可能な駆動制御装置を提供する。
【解決手段】 制御部が、各FET11〜16、21〜26の「ショート故障」を検出する。ショート故障とは、FET11〜16、21〜26が常時ONとなってしまう故障である。制御部は、FET11〜16、21〜26のいずれかの「ショート故障」を判定すると、6つの遮断スイッチ71〜76のうちで対応する3つをOFFとする。例えば、一方のインバータ10のFET(Su+)11に「ショート故障」を判定した場合、一方のインバータ10に対応する3つの遮断スイッチ71〜73をOFFにするという具合である。また、制御部は、他方のインバータ20については制御を継続する。
(もっと読む)
電動機駆動方法
【課題】3相PWMインバータを用いて交流電動機および直流電動機の双方を駆動可能なものにおいて、交流電動機と直流電動機との切り替えを容易に行うことのできる電動機駆動方法を提供することを目的とする。
【解決手段】第1ステップとして3相PWMインバータ3の3相出力線63,64,65に直流電流を発生させ、3相出力線63,64,65の各相に流れる電流の総和が零であるかどうかを確認する。次に、第2ステップとして任意の2相の出力線63,64に直流電流を発生させ、この出力線63,64に流れる電流の和が零であるかどうかを確認し、第3ステップとして第2ステップで出力電流の和が零であると確認できた2相の出力線63,64とは別の1相の出力線65に流れる電流が零であるかどうかを確認する。上記第1〜3ステップの結果に基づいて、3相PWMインバータ3の3相出力線63,64,65に接続された電動機種別を判別する。
(もっと読む)
モータ制御装置
【課題】回転角センサの故障時に、回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】センサ故障判定部40は、レゾルバ8の出力信号の異常を検出すると、第2モードから、第1モードに、モータ制御モードを切換える。第1モードでは、仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。制御角θCとロータ角θMとの差(負荷角θL)に応じたアシストトルクが発生する。一方、検出操舵トルクTを指示操舵トルクT*に近づけるように、PI制御部23によって、加算角αが生成される。制御モードが切り換えられたときの制御角の初期値は、当該切換時点において必要なモータトルクに応じた負荷角と、レゾルバの故障検出直前のレゾルバの検出値と、レゾルバの故障が発生してからその故障がセンサ故障判定部によって検出されるまでの間のロータの回転量との和により求められる。
(もっと読む)
モータ制御装置
【課題】回転角センサを用いない新たな制御方式でモータを制御する。
【解決手段】切換制御部40は、モータ3の回転角速度ωに応じて第1モードと第2モードとの間で制御モードを切り換える。第1モードでは、仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は、制御上の回転角である制御角θCに従う座標系である。一方、操舵トルクTがフィードバックされ、指示操舵トルクT*に操舵トルクTを近づけるように、加算角αが生成される。この加算角αが制御角θCの前回値θC(n-1)に加算されることにより、制御角θCの今回値θC(n)が求められる。第2モードでは、検出操舵トルクTに応じて二相指示電流値Idq*が設定されるとともに、誘起電圧推定部27などの働きによってロータの回転角が推定される。この推定により求められた推定回転角θEを用いてモータ3の制御が行われる。
(もっと読む)
モータ制御装置
【課題】回転角センサを用いない新たな制御方式でモータを制御する。
【解決手段】仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は、制御上の回転角である制御角θCに従う座標系である。制御角θCとロータ角θMとの差(負荷角θL)に応じたアシストトルクが発生する。一方、検出操舵トルクTがフィードバックされ、検出操舵トルクTを指示操舵トルクT*に近づけるように、加算角αが生成される。加算角αが制御角θCの前回値θC(n-1)に加算されることにより、制御角θCの今回値θC(n)が求められる。加算角αは、加算角リミッタ24による制限を受ける。検出操舵トルクTが飽和状態となると、初期化部29により、加算角α等の初期化が行われる。検出操舵トルクTの飽和に応答して初期化が行われたときは、検出操舵トルクTの絶対値が所定のしきい値以下となるまで、初期化処理が禁止される。
(もっと読む)
モータ制御装置
【課題】回転角センサを用いない新たな制御方式でモータを制御する。
【解決手段】仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は、制御上の回転角である制御角θCに従う座標系である。制御角θCとロータ角θMとの差である負荷角θLに応じたアシストトルクTAが発生する。一方、操舵トルクTがフィードバックされ、指示操舵トルクT*に操舵トルクTを近づけるように、加算角αが生成される。この加算角αが制御角θCの前回値θC(n-1)に加算されることにより、制御角θCの今回値θC(n)が求められる。角速度演算部27は、三相検出電流IUVWのゼロクロス点間の間隔に基づいて、回転角速度ωを求める。補正部28は、指示操舵トルクT*の変化に応じて回転角速度ωに補正を施す。角速度適応制御部29は、回転角速度ωに基づき、PI制御部33のゲインを変更する。
(もっと読む)
モータ制御装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は、制御上の回転角である制御角θCに従う座標系である。制御角θCとロータ角θMとの差は負荷角θLである。この負荷角θLに応じたアシストトルクTAが発生する。一方、指示操舵トルクT*に操舵トルクTを近づけるように、加算角αが生成される。この加算角αが制御角θCの前回値θC(n-1)に加算されることにより、制御角θCの今回値θC(n)が求められる。指示電流値増加判定部27は、検出操舵トルクT、指示操舵トルクT*およびリミッタ24の動作状況に応じて、γ軸指示電流値Iγ*に対する補正値を生成する。指示電流値補正部37はその補正値でγ軸指示電流値Iγ*を一時的に増加補正する。
(もっと読む)
モータ制御装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は、制御上の回転角である制御角θCに従う座標系である。制御角θCとロータ角θMとの差は負荷角θLである。この負荷角θLに応じたアシストトルクTAが発生する。一方、操舵トルクTがフィードバックされ、指示操舵トルクT*に操舵トルクTを近づけるように、加算角αが生成される。この加算角αが制御角θCの前回値θC(n-1)に加算されることにより、制御角θCの今回値θC(n)が求められる。リミッタ24は、制限値設定部28によって設定される制限値ωmaxに基づいて加算角αを制限する。制限値ωmaxは、モータ回転角速度に応じて可変設定される。
(もっと読む)
モータ駆動制御回路及び電動パワーステアリング装置
【課題】安価に製造可能なモータ駆動制御回路及び電動パワーステアリング装置の提供を目的とする。
【解決手段】本発明のモータ駆動制御回路40では、3相の給電ライン42U,42V,42Wにそれぞれ設けられた非常用スイッチ素子59の両端の電位差からU,V,Wの各相の電流Iu1,Iu2,Iv1,・・・を検出すると共に、モータ駆動回路43と直流電源91の負極(GND)との間に非常用スイッチ素子59より正確に電流を検出可能なシャント抵抗45を1つ設けておき、各非常用スイッチ素子59による電流Iu1,Iu2,Iv1・・・の検出結果とシャント抵抗45による電流Isの検出結果とから生成した補正係数Ku1,Ku2,Kv1,・・・によって、各非常用スイッチ素子59による電流検出結果を補正する。これにより高精度な相電流検出素子を1つだけにすることができ、モータ駆動制御回路40を安価に製造することができる。
(もっと読む)
エレベーターの制御装置
【課題】半導体素子を含む電力変換装置を備えたエレベーターの制御装置において、前記半導体素子の寿命を延ばす。
【解決手段】エレベーターかご9を運転する交流電動機6を駆動制御するインバータ4を有するエレベーターの制御装置で、エレベーターかご9の負荷を検出するかご負荷検出装置11と、かご負荷検出装置11により検出されるかご負荷とエレベーターの複数の運転パターンによって交流電動機6の加速度を指定する加速度指定テーブル7とを備え、加速度指定テーブル7に指定された交流電動機6の加速度は、インバータ4に含まれる半導体素子のジャンクション温度リップルあるいはベース板温度リップルにより規制される。
(もっと読む)
モータ駆動制御装置、及び電動パワーステアリング装置
【課題】一シャント方式であっても簡易な構成とし、且つ電動モータの出力制限を防ぐ。
【解決手段】電動モータ7に対する電流指令値Irefjを算出し、算出した電流指令値Irefjと電動モータ7の抵抗推定値R^とに基づいて電圧指令値Vjを算出し、算出した電圧指令値Vjに基づいて電動モータ7を駆動する。また、電動モータ7に通電される全電流推定値I^を演算すると共に、一つの電流検出器26で全電流検出値Idctを検出し、これら全電流推定値I^と全電流検出値Idctとに基づいて、電動モータ7の推定抵抗値R^を推定し、この推定抵抗値R^により、電圧指令値Vjの算出に用いる推定抵抗値R^を更新する。
(もっと読む)
同期電動機制御装置
【課題】同期電動機が高速回転中にでも回転角周波数と磁石軸を正確に推定して始動できる制御装置を提供する。
【解決手段】同期電動機の電流を角周波数ωで回転し直交するγδ軸成分に分けて各成分の電流指令に追従するように各成分の電圧指令を出力する電流制御器11と、電圧指令に基づいた電圧を同期電動機に印加する電力変換器からなる同期電動機制御装置において、電流指令を零とした状態で電圧指令の静止座標から見た回転角周波数と電圧指令のγ軸成分に所定ゲインを乗じたものとの和を回転座標の回転角周波数ωとして出力する座標軸周波数調整器13を具備する。
(もっと読む)
走行機構用制御装置及びこれを用いた建設機械
【課題】バッテリと電動機の間の電線が切断された場合に、電動機により駆動される下部走行体の走行機構を適切に停止させることができる走行機構用制御装置の提供。
【解決手段】本発明は、バッテリに接続される電動機により駆動される下部走行体の走行機構を備える建設機械において、前記電動機の作動を制御する走行機構用制御装置であって、前記バッテリと前記電動機の間の電線に流れる電流の状態を検出する検出手段と、前記電動機の回転速度を表す情報を検出する回転速度情報検出手段が接続され、前記検出手段の検出結果に基づいて前記電線の切断が検出された場合に、前記電動機を短絡状態に切り替えると共に、前記電動機を短絡状態に切り替えた後、前記回転速度情報検出手段の検出結果に基づいて前記電動機の回転速度が所定値以下となったと判定した場合に、メカニカルブレーキを作動させて前記電動機の回転を停止させることを特徴とする。
(もっと読む)
1 - 20 / 76
[ Back to top ]