
Fターム[5H505LL13]の内容
交流電動機の制御一般 (51,584) | 検出変量、検出手段 (8,979) | 速度の検出 (1,620) | 速度検出器を用いないで速度を検出するもの (581) | 電気的変量の検出によるもの (374)
Fターム[5H505LL13]の下位に属するFターム
電流検出によるもの (262)
電圧検出によるもの (38)
逆起電圧検出によるもの (41)
Fターム[5H505LL13]に分類される特許
1 - 20 / 33
線電流検出装置および電力変換システム
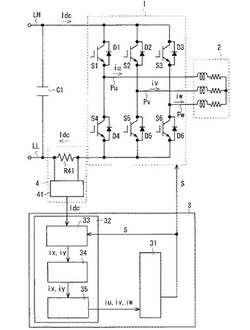
【課題】誤差を低減して線電流を得ることができる線電流検出装置を提供する。
【解決手段】二相線電流取得部33は、スイッチング素子S1〜S6のスイッチングパターンが変化するタイミングよりも前又は後の第1時点において検出された直流電流を、第1時点でのスイッチングパターンによって決定される第1相の線電流として推定し、当該タイミングに対して第1時点とは反対側であって前記第1時点との差が第1時間である第2時点において検出された直流電流を、第2時点でのスイッチングパターンによって決定される第2相の線電流として推定する。線電流補正部34は、第1相の線電流を補正して第3時点における第1相の線電流と、第3時点との差が第1時間よりも短い第2時間である第4の時点における第2相の線電流とを出力し、第1相の線電流のみを補正するときには第4時点として第2時点が採用される。
(もっと読む)
電力変換装置

【課題】同期PWM制御を有するマルチレベル電力変換装置あるいは直列多重型電力変換装置において、三角波キャリアの周波数fcの設定の自由度を増すことにより制御系の安定性を向上する。
【解決手段】交流電源電圧を直流電圧に変換し変換された直流電圧を交流電圧に変換する電力変換器を複数備え、該複数の電力変換器の交流出力を組み合わせて多レベルの交流電圧を出力する電力変換装置において、前記電力変換装置は三角波のキャリア信号と正弦波の相電圧指令を比較して前記直流電圧を交流電圧に変換する電力変換器をPWM制御するPWM変調器を備え、前記PWM変調器に入力する三角波のキャリア信号の周波数と前記相電圧指令の周波数の比は、3の奇数倍の外に、3の偶数倍、3の奇数倍および偶数倍を除く整数倍を含む。
(もっと読む)
モータ制御装置
【課題】永久磁石同期モータのセンサレス制御の安定性を向上することができるモータ制御装置を提供する。
【解決手段】相電圧設定手段は、モータ及びインバータの少なくとも何れか一方の器差を有するパラメータに基づいた電流位相誤差範囲を含む実電流位相領域を規定し、センサレス制御にてロータ位置を検出可能な安定運転電流位相領域を規定し、実電流位相領域が安定運転電流位相領域内となるように、電流ベクトル制御により設定された電流に、回転数検出手段で検出された回転数に応じた所定の位相差を加えたものを目標電流として設定する。
(もっと読む)
回転機の制御装置
【課題】永久磁石を備えるモータジェネレータ10の減磁の有無を判断するための処理手段を適合するに際し、その工数が多くなること。
【解決手段】モータジェネレータ10は、クラッチC1を介して駆動輪14に機械的に連結されて且つクラッチC2を介してエンジン16に機械的に連結されている。車両の起動スイッチがオンされた直後、クラッチC1,C2を解除した状態において、電流フィードバック制御によってモータジェネレータ10のトルクを制御し、この際の実際のトルクが要求トルクを下回ることに基づき、永久磁石の磁束が減少したと判断する。
(もっと読む)
モータ駆動装置及び圧縮機及び冷凍サイクル装置及び洗濯機及び洗濯乾燥機及び送風機
【課題】モータ駆動中の振動抑制及び振動による機器の劣化や騒音発生によるユーザ不満を解消する。
【解決手段】この発明に係るモータ駆動装置100は、負荷を駆動するモータ3と、モータ3に電圧を印加するインバータ2と、インバータ2が出力する電圧を制御するインバータ制御手段4と、モータ3の所定の箇所に取り付けられて、モータ3の振動を検出する振動検出手段5と、振動検出手段5の出力を補正する振動出力補正手段27と、振動出力補正手段27の出力からモータ3の回転軸に対して接線方向の振動成分を分離する振動分離手段6と、振動分離手段6の出力に基づいて、振動を抑制するための信号を出力する振動抑制制御手段7と、を備え、インバータ制御手段4は、振動抑制制御手段7の出力に基づいてインバータ2にて印加する電圧を制御するものである。
(もっと読む)
電気機械の作動のための方法および駆動装置
本発明は電気機械の作動のための方法および駆動装置に関している。この電気機械は、ローターとステーターを有しており、駆動装置は駆動ユニット(2)を有している。本発明によれば、ステーターに対するローターの角度位置が、前記駆動ユニット(2)に対応付けされている回転角センサ(4)を確定される。さらに本発明の対象は駆動装置にも関している。  (もっと読む)
(もっと読む)
巻線界磁式同期機の制御装置
【課題】安価なマイコンを使用しつつ、簡単な制御系で10万rpm以上の超高速回転でも安定した駆動を実現した巻線界磁式同期機の制御装置を提供する。
【解決手段】巻線界磁式同期機1の界磁巻線1aに流れる界磁電流ifを界磁電流検出手段8で検出する一方、三相/二相座標変換手段9でトルク脈動成分を示す電圧ベクトルに対して平行な電流成分iδを抽出し、周波数補正手段20でこの抽出した電流成分iδの周波数に基づいて周波数補正量Kiδを算出し、この周波数補正量Kiδで制御目標となる周波数指令ω*を補正するが、その際、周波数補正量Kiδを求めるための制御定数を界磁電流ifの大きさによって変更する構成とした。
(もっと読む)
PMモータの位置・速度センサレス制御装置
【課題】電流検出器や電圧検出器の増設を不要にした簡易な構成で、しかも確実な脱調検出ができる。
【解決手段】モデル電圧演算部10は、PMモータ2の電圧方程式を基にしたPMモータモデルを使って、PMモータの速度指令の速度と電流指令のdq軸電流からdq軸モデル電圧vd*,vq*を求める。脱調判定部11は、モデル電圧とインバータの電圧指令vd,vqの比較によりPMモータの脱調の有無を判定する。
または、モデル電圧を演算する際にPMモータの電流指令に代えてdq軸電流検出値を用いる、さらにまたq軸成分のモデル電圧のみを使って脱調判定をする。
(もっと読む)
交流モータの制御装置
【課題】回転磁石形交流モータのロータの回転位置の検出精度を高めるとともに、電気的外乱の影響を低減できる交流モータの制御装置を提供する。
【解決手段】ロータ位置検出手段と、ステータコイル電流検出手段と、要求出力とロータ回転位置およびコイル電流に基づき制御出力信号を演算する制御手段(制御装置本体)とを備え、位置検出手段はロータの回転位置に比例するとともに電気角の1回転でゼロに戻る不連続点のある出力特性を有し、制御手段は、位置検出手段の原位置信号θiに含まれる高周波成分を除去してフィルタ出力信号Foを生成するローパスフィルタ部6と、ローパスフィルタ部6による位相遅れを補償する位相遅れ補償部5と、位置検出手段の不連続点以外でフィルタ出力信号Foを最終的な補正位置信号θoとし不連続点で原位置信号θiを補正位置信号θoとする不連続点切替部(出力切替器75)と、をもつ位置補正器21を有する。
(もっと読む)
永久磁石励磁形同期機械の回転子シャフトの位置を、電流信号と電圧信号に基づいて角度センサなしで決定する方法および装置
本発明は、電気機械の少なくとも1つの記録された入力信号に基づいて電気機械の回転子軸の位置情報を決定するための方法および装置に関する。ここでは、記録された入力信号が電気機械のモデルに供給され、供給された入力信号に基づいて回転子軸の位置情報がモデルにより決定され、モデルが電気機械の非線形の飽和効果をシミュレートする。電気機械のモデルは拡張されたカルマンフィルタであり、ここでは電気機械の非線形飽和作用が多項式によって記述される。  (もっと読む)
(もっと読む)
交流電動機の制御装置
【課題】矩形波電圧制御において矩形波電圧の位相変更の際にオフセット電流の発生を抑制可能な交流電動機の制御装置を提供する。
【解決手段】スイッチングエリアがA1のとき(S10にて「A1」)、制御装置は、トルク偏差に応じたフィードバック演算により算出される位相変更量だけ位相を進める(S20)。一方、スイッチングエリアがA1に続くA2のとき(S10にて「A2」)、制御装置は、S20において進められた位相変更量だけ位相を遅らせる(S30)。また、スイッチングエリアがA2に続くA3のとき(S10にて「A3」)、制御装置は、S20において進められた位相変更量だけ再び位相を進める(S40)。
(もっと読む)
モータ制御装置
【課題】低速域用位置検出と高速域用位置検出との切換えを適切に行うことにより、正確なロータ位置の推定を可能とし、モータを効率的に制御できるようにする。
【解決手段】位置推定部21は、電動モータ3の回転位置を求める。位置推定部21は、低速域用位置推定部41と、高速域用位置推定部42と、切換判定部43と、切換部44とを備えている。低速域用位置推定部41は、電動モータ3が低速域で回転しているときに低速推定回転位置θ^Lを生成する。高速域用位置推定部42は、電動モータ3が高速域で回転しているときに高速推定回転位置θ^Hを生成する。切換部44は、低速推定回転位置θ^Lおよび高速推定回転位置θ^Hのいずれかを選択し、推定回転位置θ^として出力する。切換判定部43は、低速域と高速域との重複領域である切換速度領域において、回転速度ωと回転加速度αとの符号の異同に応じて、切換部44に切換えを指令する。
(もっと読む)
交流電動機の制御装置
【課題】矩形波電圧制御からPWM制御への切替遅れを抑制可能な交流電動機の制御装置を提供する。
【解決手段】制御モード切替部490は、矩形波電圧制御部400による矩形波電圧制御からPWM制御部280によるPWM制御への切替判定に所定の切替判定トルクから算出される電流位相を用いて、矩形波電圧制御からパルス幅変調制御への切替を行なう。ここで、制御モード切替部490は、トルク指令値Trqcomに対するトルク偏差ΔTrqの絶対値が所定値以下のとき、切替判定トルクにトルク指令値Trqcomを用い、トルク偏差ΔTrqの絶対値が所定値よりも大きいとき、トルク指令値Trqcomに所定値を加えた値を切替判定トルクに用いる。
(もっと読む)
電動機の磁極位置推定装置
【課題】演算負荷の増大を抑制しつつ、磁極位置の推定精度の低下を防止する。
【解決手段】電動機の磁極位置推定装置は、モータ11が発生する誘起電圧が回転速度によって変化することを利用してdq座標系に対するγδ座標系の位相差Δθeを推定する磁極位置誤差推定部46と、位相差Δθeから磁極位置推定値θeを演算する回転速度−磁極位置演算部47とを備え、磁極位置誤差推定部46は、モータ11の簡易的な電圧方程式をキャリア信号の1周期Tsによるサンプリング時間で0次ホールドにより離散化して得た離散時間状態方程式により、モデル電流を算出し、このモデル電流とモータ11に通電される実電流との電流偏差に基づき、位相差Δθeを推定する。
(もっと読む)
抵抗値補償機能を有した電動機制御装置
【課題】 巻線抵抗値の変動を通常運転への支障を生じることのない短時間で把握することで、電動機の低速回転時の性能を改善する。
【解決手段】 抵抗指標演算11は、所定電圧指令Vd*と、前記電圧指令Vd*に応じて電動機4を流れ電流検出2にて検出された電流値に基づき、電動機4の抵抗値に相応する抵抗指標を演算する。また抵抗指標演算11は、既知の抵抗値に対応する抵抗指標基準を演算する抵抗指標基準演算部を具備する。抵抗変動率演算部13は、指標演算部11により演算される現在の抵抗指標と前記抵抗指標基準から、抵抗変動率を演算する。抵抗値設定部12は、前記抵抗変動率と前記既知の抵抗値に基づき、電動機4のトルク制御に必要となる抵抗値を演算して提供する。抵抗値設定部12により演算された抵抗値に応じて、制御部9に供給される電圧指令が設定される。
(もっと読む)
モータ制御装置
【課題】同期PWMにおける同期数の切り換えを適切に行う。
【解決手段】同期PWM判定器46は、同期PWM制御における同期数を決定し、同期PWM位相制御器48は、同期数に応じて三角波キャリアの周波数を決定するとともに、同期数切り換えのタイミングを決定する。PWM制御部40は、電圧指令の位相に対し三角波キャリアの位相を同期させる同期PWM制御を実施する。特に、三角波キャリアが所定の位相の時点での電圧指令値の位相を検出し、非同期状態から同期状態に変更するときまたは同期数を変更する同期切り換えを行うに当たって、切り換え前後の三角波キャリアの所定位相における電圧指令の位相の差が所定の範囲内であることを切り換え条件とする。
(もっと読む)
回転電機制御システム及び車両駆動システム
【課題】直流電源の出力を昇圧する機能を有した回転電機制御システムにおいて、昇圧の開始時に生じる過渡的な電圧上昇に伴って直流電源に過電流が発生することを抑制する。
【解決手段】直流電源と回転電機との間に介在されて直流電源の出力を交流に変換する周波数変換部と、直流電源と周波数変換部との間に介在されて昇圧指令値に基づいて直流電源の出力を昇圧する電圧変換部と、周波数変換部及び電圧変換部を制御する制御部とを備え、前記回転電機の前記目標トルク及び前記回転速度がそれらの相関関係に基づいて設定された所定の移行境界を越えたことを条件として、制御部が非昇圧制御から昇圧制御へ移行させる制御を行うに際して、移行の際に過渡的に生じる上昇電力を直流電源が出力可能な許容電力から差し引いた電力である昇圧可能電力KSを基準とし、回転電機の消費電力が昇圧可能電力KS以下となる領域に移行境界K3が設定される。
(もっと読む)
回転電機制御システム及び車両駆動システム
【課題】消費電力が大きい状態においてバッテリの電圧を昇圧して回転電機を駆動させても、バッテリが過電流とならないように消費電力を抑制可能な回転電機制御システムを提供する。
【解決手段】車両を駆動するための回転電機に電力を供給する直流電源と回転電機との間に介在され、少なくとも回転電機が力行する際に直流電源の出力を交流に変換する周波数変換部と、直流電源と周波数変換部との間に介在され、回転電機の目標トルク及び回転速度に応じて設定される昇圧指令値に基づいて直流電源の出力を昇圧する電圧変換部と、周波数変換部及び電圧変換部を制御する制御部とを備え、制御部は、回転電機の消費電力が所定の電力制限値を超えた場合に昇圧指令値の上昇を制限する。
(もっと読む)
回転機の制御装置、及び回転機の制御システム
【課題】モータジェネレータ10に対する指令電圧とキャリアとの大小比較に基づき、インバータ34のスイッチング素子を操作するに際し、1電気角周期に対するキャリア周期の比の変化に起因してモータジェネレータ10の制御性が低下すること。
【解決手段】キャリア生成部36では、回転速度ωに応じて定まる電気角周波数に同期数を乗算したものをキャリア周波数として設定する。位相補正部38では、同期数が増加する場合、指令電圧vdr、vqrの位相を遅角補正すべく、フィードバック制御部28a,28bの積分項を補正し、同期数が減少する場合、指令電圧vdr、vqrの位相を進角補正すべく、フィードバック制御部28a,28bの積分項を補正する。
(もっと読む)
モータ制御装置
【課題】コストの大幅な増加を伴うことなく、回転角検出手段の故障時に正確に推定された回転角を用いてモータを適切に駆動することができるモータ制御装置を提供する。
【解決手段】レゾルバ2に故障が生じていない通常時はレゾルバ2が検出する検出回転角θSを用いてモータ1が制御される。レゾルバ2に故障が生じたときは、回転角推定部31が演算する推定回転角θEを用いてモータ1が制御される。レゾルバ2が正常なときに、検出回転角θSから求めた回転角速度ωから検出誘起電圧ESαβが演算される。また、二相電圧指令値Vαβおよび二相検出電流Iαβに基づいて推定誘起電圧EEαβが演算される。これらの比較に基づき、推定誘起電圧EEαβを補正するための補正値Cαβが生成され、補正値記憶部30に書き込まれる。回転角推定部31は、推定誘起電圧EEαβを補正値Cαβで補正し、この補正後の推定誘起電圧を用いて推定回転角θEを求める。
(もっと読む)
1 - 20 / 33
[ Back to top ]