
Fターム[5H505LL40]の内容
交流電動機の制御一般 (51,584) | 検出変量、検出手段 (8,979) | 電動機定数(2次抵抗を除く) (66)
Fターム[5H505LL40]に分類される特許
1 - 20 / 66
モータ制御装置及びモータパラメータ推定方法
【課題】オンラインでのモータパラメータ同定を可能とするとともに、空間高調波によるモータパラメータ同定への影響を低減又は無くすことができるモータ制御装置及びそれに用いられるモータパラメータ同定方法を提供する。
【解決手段】モータパラメータ同定部9が、前記電動モータMの制御回転軸の位相が所定位相となった時に前記電動モータMに印加されている電圧値である同定用電圧値、又は、前記電動モータの制御回転軸の位相が所定位相となった時に前記電動モータに流れている電流値である同定用電流値に基づいて前記モータパラメータを同定するように構成した。
(もっと読む)
誘導電動機の回転子時定数推定装置

【課題】本発明は、周辺環境または運転条件の影響を少なく受けて、常に一定水準のトルクを発生する誘導電動機の回転子時定数推定装置を提供する。
【解決手段】本発明は、d軸電流指令及びq軸電流指令を受信して、q軸電圧指令を出力し、q軸電圧推定値を出力して、前記q軸電圧指令と前記q軸電圧推定値との差である回転子時定数の変動値を出力し、前記回転子時定数の変動値を回転子時定数に加算して、変更された回転子時定数を出力する。
(もっと読む)
同期機制御装置
【課題】同期機や電力変換手段等の状態に応じて、適切な運転目標指令を生成し、運転目標を満足する制御指令を生成する。
【解決手段】トルク指令と回転速度と運転目標指令とに基づいて、電機子鎖交磁束指令とトルク電流指令を生成する制御指令生成器10を、トルク指令またはトルク電流指令に基づき第1の磁束指令を生成する第1の磁束指令生成器21と、トルク指令またはトルク電流指令と同期機1の回転速度とに基づき第2の磁束指令を生成する第2の磁束指令生成器22と、運転目標指令に基づき第1および第2の磁束指令の2つの磁束指令の配分比に相当する配分係数を設定する指令配分設定器23と、2つの磁束指令と配分係数に基づき電機子鎖交磁束指令を出力する磁束指令調整器24と、トルク指令と電機子鎖交磁束指令とに基づきトルク電流指令を生成するトルク電流指令生成器25により構成する。
(もっと読む)
永久磁石同期電動機駆動システムのパラメータ推定装置
【課題】本発明は、永久磁石同期電動機駆動システムのパラメータ推定装置を提供する。
【解決手段】本発明の推定装置は、リアルタイム磁束推定を介してインダクタンスと永久磁石による鎖交磁束を推定して、永久磁石同期電動機の運転性能を向上する。
(もっと読む)
回転機の制御装置
【課題】モデル予測制御を用いる場合、スイッチングモードの更新可能タイミングの都度、スイッチングモードを最適なものに変更することが可能であることから、スイッチングモードの切り替え頻度が高くなるおそれがあること。
【解決手段】予測部33では、モード設定部31によって仮設定されたスイッチングモードのそれぞれに応じて、モータジェネレータ10を流れる電流と指令電流id*,iq*との差ベクトルのノルムが閾値rとなるまでの所要時間Tsを予測する。モード決定部34では、所要時間Tsが最も長いものを最終的なスイッチングモードに決定する。操作部28では、インバータINVのスイッチングモードをモード決定部34の決定に従わせる。
(もっと読む)
回転機の制御装置
【課題】モータジェネレータ10を流れる電流が大きくなることで、モデル予測制御の制御性が低下すること。
【解決手段】予測部33では、モード設定部31によって仮設定されたスイッチングモードのそれぞれに応じた予測電流ide,iqeを算出する。モード決定部34では、予測電流ide,iqeと指令電流id*,iq*との乖離が小さいものを最終的なスイッチングモードに決定する。操作部28では、インバータINVのスイッチングモードをモード決定部34の決定に従わせる。ここで、予測部33は、予測電流ide,iqeの予測に用いる電圧方程式における電流の時間微分の係数として、過渡インダクタンスLdt,Lqtを用いる。それらは、電流と電気角速度ωとの積の係数としての定常インダクタンスLds,Lqsとは相違する。
(もっと読む)
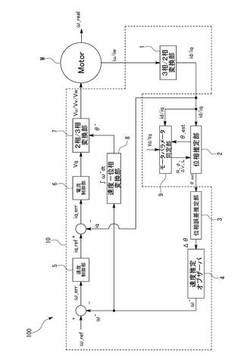
モータ制御装置
【課題】モータ定数の設定誤差も含めて補償して、高精度なトルク制御が可能なモータ制御装置を提供することにある。
【解決手段】モータ制御装置100は、モータMOTに対するトルク指令値から求められた電流指令値が、モータMOTに電力変換器INVを介して供給される電流に対する電流検出値に一致するように、モータに供給される電流を制御する制御部を有する。制御部は、モータが出力するトルクを推定し、推定されたモータのトルク推定値が、トルク指令値に一致するようにモータに供給される電流を制御する。トルク推定演算部20は、モータが出力するトルクを推定する。位相誤差指令演算部25は、トルク推定値とトルク指令値との偏差から、位相誤差の指令値を算出する。速度推定演算部50は、位相誤差の指令値に、位相誤差推定値が一致するように、速度推定値を出力する。
(もっと読む)
同期電動機の駆動装置
【課題】同期電動機の力率及びトルクを簡便な方法で高精度に制御することができる同期電動機の駆動装置を提供する。
【解決手段】同期電動機の実速度と速度基準との偏差に基づいて、同期電動機のトルク基準を算出する速度制御手段と、同期電動機の電機子に流れる電流、同期電動機の界磁に流れる電流、電機子の反作用インダクタンスの算出値に基づいて、同期電動機の内部相差角を算出する磁束演算手段と、トルク基準と内部相差角とに基づいて、同期電動機の力率が1となるように、電機子の電流基準を算出する電流基準演算手段と、電機子に流れる電流と電機子の電流基準との偏差がなくなるように、同期電動機に流れる電流を制御する電流制御手段と、磁束演算手段が内部相差角を算出する際に利用する電機子の反作用インダクタンスの算出値を同期電動機の負荷状態に応じて変化させるパラメータ演算手段と、を備えた。
(もっと読む)
モータ駆動回路、および、モータ駆動システム
【課題】MCUの限られた数のポートで伝達する情報の種類を増加させる。
【解決手段】モータ駆動回路は、MCU300が出力した信号が入力される第1のポートP1を備え、第1のポートP1を介して入力された入力信号のデューティを測定し、デューティ情報信号を出力するデューティ測定回路100aと、入力信号の周波数を測定し、この測定した周波数に応じた周波数情報信号を出力する周波数測定回路100bと、デューティ情報信号および周波数情報信号の何れか一方に基づいて、MCU300が指令したモータの回転速度を計算し、この計算した回転速度の情報を含む回転速度情報信号を出力する指令速度計算回路100cと、回転速度情報信号と、デューティ情報信号および周波数情報信号の残りの他方により得られた情報とに基づいて、モータを指令された回転数で駆動するためのPWM信号である駆動制御信号を生成するモータ駆動波形制御回路100eを備える。
(もっと読む)
誘導電動機の制御装置
【課題】誘導電動機の電気定数を、回転子の停止状態で正確に推定する。演算負荷を少なくして固定少数点演算を可能にし、コストを低減する。
【解決手段】プラント入力(誘導電動機の一次電圧検出値)から第1,第2の信号をそれぞれ演算する第1,第2の信号演算手段、プラント出力(誘導電動機の一次電流検出値)から第3,第4の信号をそれぞれ演算する第3,第4の信号演算手段、第5の信号を一定値に設定する手段、5次元の信号ベクトルと5次元のパラメータ推定値ベクトルとの内積から出力推定値を演算する手段、を備えた信号演算器101と、前記出力と出力推定値との偏差及び信号ベクトルからパラメータ推定値ベクトルを演算する適応同定器102と、パラメータ推定値ベクトルから誘導電動機の電気定数推定値を演算する係数演算器103,電気定数演算器104と、を備える。
(もっと読む)
モータの診断方法
【課題】 車両の走行時と、車両の非走行時のいずれの場合でも、モータコイルの異常を検出することができ、モータ異常への対処を早期に図ることができるモータの診断装置および診断方法を提供する。
【解決手段】 車両の電源が投入されている非走行時に、モータコイルのコイル温度とモータコイルのコイル抵抗または絶縁抵抗とを検出し、コイル温度が閾値を超えるか、または、コイル抵抗もしくは絶縁抵抗が閾値を超えたときモータコイルの異常と検出する始動時異常検出手段98を設けた。さらに車両の走行時に、コイル温度とモータ回転数とモータ印加電圧とモータ電流とを検出し、コイル温度が閾値を超えるか、または、モータ回転数に対応する、モータ印加電圧とモータ電流との関係が設定範囲から外れるときモータコイルの異常と検出する走行時異常検出手段99を設けた。
(もっと読む)
発電電動機の異常検出装置および異常検出方法
【課題】発電電動機の駆動時および電力回生時において、発電電動機の絶縁抵抗を求めて、絶縁異常を検出することができる発電電動機の異常検出装置を提供する。
【解決手段】直流電源4から供給される電力をインバータ3で制御して駆動する発電電動機2の異常検出装置において、発電電動機2の電動機駆動母線6の零相電流を検出する零相電流検出手段12と、電動機駆動母線6を流れる電流の周波数を検出する周波数検出手段15と、直流電源4の電圧を検出する電圧検出手段14と、電動機駆動母線6の零相電流を発電電動機2の周波数で同期検波する同期検波手段13と、同期検波手段13の出力である漏洩電流値と直流電源4の電圧とから絶縁抵抗を算出して異常を検出する異常検出手段11とを備える。
(もっと読む)
誘導性負荷制御装置
【課題】磁気飽和する誘導性負荷の,原点からの傾きであるインダクタンスと接線の傾きであるインダクタンスを,テーブルを増やすことなく同時に得る。
【解決手段】誘導性負荷の電流Iに対する磁束鎖交数φの特性において,電流I1の時の磁束鎖交数をφ1とするときの原点からの傾きであるLs1=φ1/I1を電流I1での静的インダクタンスとし,電流I1時の前記特性の電流に対する磁束鎖交数の傾きLa1=dφ/dI・(I1)を電流I1での動的インダクタンスとし,I=0時の動的インダクタンスLa0に対する各電流での静的インダクタンスの変化率の2乗にLa0を乗じることで各電流での動的インダクタンスの近似値を得る。
(もっと読む)
圧縮機モータの予熱制御装置
【課題】圧縮機モータの巻線抵抗が相毎に異なる場合や圧縮機の内部温度が不均等である場合でも、圧縮機の内部を正確かつ均等に予熱を行う。
【解決手段】本発明の予熱制御装置は、各相の巻線抵抗を算出する巻線抵抗演算手段12と、各相の巻線温度を算出する巻線温度演算手段13と、各相の巻線温度に応じた電流指令を算出する電流指令演算手段14と、電圧指令を演算する電圧指令演算手段15と、それらを制御するシーケンス制御手段とを備える。これにより各相の巻線温度に応じて電流指令を変化させて圧縮機の内部を正確かつ均等に予熱を行う。
(もっと読む)
永久磁石形同期電動機の制御装置
【課題】埋込磁石形同期電動機を低速、重負荷時においても安定に運転可能な制御装置を提供する。
【解決手段】磁極位置検出器を持たない永久磁石形同期電動機1の回転子のN極方向をd軸、d軸から90°進み方向をq軸、前記d,q軸に対応する制御上の推定軸をγ,δ軸とそれぞれ定義し、電動機1の電圧、電流をγ,δ軸上でベクトルとしてとらえ、電動機1のq軸インダクタンスに対応する制御上のq軸インダクタンス設定値とγ,δ軸の電流検出値及び電圧指令値とから、電動機1の速度及びγ軸の角度を推定するための磁束オブザーバ26、角度速度推定器23、速度推定器23、磁極位置演算器24を有し、更に、γ軸の角度に含まれる速度推定値と実速度との間の速度推定誤差に起因した外乱が零または零近傍となるように、q軸インダクタンスを設定するq軸インダクタンス設定器27を備える。
(もっと読む)
モータ駆動装置及びモータ駆動方法
【課題】制御性能に優れたベクトル制御を行う。
【解決手段】モータ200の各相を流れるモータ電流を取得し、A/D変換された第1のモータ電流を出力するA/D変換器30と、
第1のモータ電流から第2のモータ電流を生成し、この第2のモータ電流、モータパラメータ及び所望の回転角速度に基づいて第1のモータ電圧を求め、この第1のモータ電圧から第2のモータ電圧を生成する演算ユニット10と、
第2のモータ電圧に基づいてモータ200を駆動するためのPWM信号を生成するPWM生成器20と、を備え、
演算ユニット10は、直流励磁制御状態における第2のモータ電流の最大ピーク値及び最小ピーク値に基づいてモータ抵抗とモータインダクタンスを算出し、かつ、強制転流制御状態における第2のモータ電流と、算出されたモータ抵抗及びモータインダクタンスとに基づいてモータ誘起電圧定数を算出する、パラメータ推定器14を備える。
(もっと読む)
回転機の制御装置
【課題】変調率が「1」よりも大きい領域において、モデル予測制御を行うに際し、指令値を適切に与えることが困難なこと。
【解決手段】モデル予測制御部30では、指令電流idr,iqrと予測電流ide,iqeとの差に基づきインバータの操作状態を決定する。指令電流idr,iqrは、トルク指令値Trと磁束指令値Φrとから算出される。磁束指令値Φrは、弱め界磁制御時には、弱め界磁磁束指令値設定部60によって設定される磁束ノルム指令値Φfwcとされる。磁束ノルム指令値Φfwcは、モータジェネレータ10を流れる電流(指令電流idr,iqr)、電気角速度ωおよび電源電圧VDCから算出される。
(もっと読む)
永久磁石形同期電動機の制御装置
【課題】永久磁石形同期電動機のセンサレス制御装置において、等価電機子抵抗を正確に推定して回転子の磁極位置を高精度に演算する。
【解決手段】電機子抵抗推定手段41と速度推定31と電気角演算器32と、を備えた制御装置において、電機子抵抗推定手段41は、電動機80の電圧方程式に基づいて等価電機子抵抗推定値の誤差を演算する演算器110と、前記誤差を増幅して等価電機子抵抗補正値を演算するための反転増幅器111、減算器112、ゲイン、積分器113等からなる手段と、等価電機子抵抗の初期設定値と等価電機子抵抗補正値とを加算して等価電機子抵抗推定値を演算する加算器115と、電動機80の電流検出値及び速度推定値に応じて、等価電機子抵抗補正値を演算する手段のゲインを制御するための第1,第2の重み係数と、を備える。
(もっと読む)
誘導電動機の制御装置
【課題】 誘導電動機を可変速制御する際に好適な該誘導電動機の電気定数の導出手段を提供する。
【解決手段】 この制御装置20を指令値演算手段21と、積分手段12と、座標変換手段13,14と、定数演算手段22とから形成し、定数演算手段22では、誘導電動機2の定格出力値PRATE[W]と、定格電圧値VRATE[V]と、定格電流値IRATE[A]とを入力し、周知の数式を用いて、誘導電動機2の電気定数としての定格磁化電流演算値IMO#を導出していることから、この導出のために、誘導電動機2を回転させること無く、また、誘導電動機2に特別な電圧を印加する必要が無く、さらに、高精度・高価格の測定回路も必要としない。
従って、この制御装置20においては、定数演算手段22で得られた誘導電動機2の電気定数としての定格磁化電流演算値IMO#や他の電気定数とに基づき、周知の技術を用いつつ、電力変換装置1を介して誘導電動機2を可変速制御できる。
(もっと読む)
交流モータの制御装置
【課題】 ユーザーの使用する制御モード及び制御対象に応じた位置推定精度を自動的に設定して、制御可否判断、及び高周波電圧の自動調整を行なう交流モータの制御装置を提供する。
【解決手段】 交流モータ(101)に流れるモータ電流を検出する電流検出器(102)と、高周波電圧を指令電圧に重畳し、その際のモータ電流を基にインダクタンスを同定するパラメータ同定器(117)と、インダクタンス同定値と高周波電圧の振幅及び周波数と電流検出器の分解能とに基づき交流モータの位置推定誤差を算出する位置推定誤差演算器(118)と、位置推定誤差又はインダクタンス同定値に基づき磁極位置の推定可否を判別する位置推定判別器(119)とを備える。
(もっと読む)
1 - 20 / 66
[ Back to top ]