
Fターム[5H505LL42]の内容
交流電動機の制御一般 (51,584) | 検出変量、検出手段 (8,979) | 被制御物の位置 (22)
Fターム[5H505LL42]に分類される特許
1 - 20 / 22
電動弁駆動システム
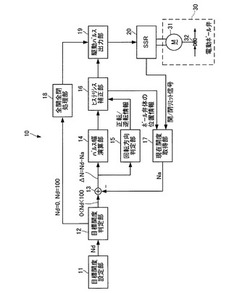
【課題】無駄なエネルギー消費を抑制し、簡単な構成で電動弁を駆動することができる電動ボール弁駆動システムを提供する。
【解決手段】電動ボール弁駆動システム10は、目標開度Ndを設定する目標開度設定部11と、目標開度Ndとボール弁32の現在開度Naとを入力して両者間の開度差分ΔNを求める加算部13と、開度差分ΔNに基づいて単相誘導電動機31を駆動する駆動パルス幅を演算するパルス幅演算部14、ボール弁32のヒステリシス相当駆動時間を求めて駆動パルス幅を補正するヒステリシス補正部16と、求めた駆動パルス幅を有する駆動パルスをSSR20に出力する駆動パルス出力部19と、駆動パルスを単相誘導電動機31に出力し、単相誘導電動機31を駆動するSSR20と、を備える。
(もっと読む)
車両用操舵装置

【課題】代替モータ回転角の検出に用いる回転角センサの分解能をモータ回転角に換算した値が90°〜180°の範囲内にある場合であっても、安定的に代替モータ回転角を用いたモータ制御を実行することのできる車両用操舵装置を提供すること。
【解決手段】マイコンは、モータ回転角センサにより検出されるモータ回転角に異常が検出された場合には、当該モータ回転角に代えて、ステアリングセンサの検出値に基づく代替モータ回転角を用いた代替制御を実行する。そして、マイコンは、代替制御に基づき換算分解能Δθ0に対応する位相遅れが生じたq軸電流指令値Iq*のq軸電流成分(第1成分Iq1)を打ち消すd軸電流指令値Id*を演算する。
(もっと読む)
アクチュエータ、モータ制御システム及びモータ制御方法
【課題】センサ総数を低減し、信頼性を向上したアクチュエータ、モータ制御システム及びモータ制御方法を提供する。
【解決手段】アクチュエータは、アクチュエータは、モータと、モータの回転を所定の変位に変換する被駆動機構と、被駆動機構の位置を規制する位置規制機構と、被駆動機構の変位を検出する位置センサと、位置規制機構により被駆動機構の位置が規制された状態での位置センサの出力変動を温度情報へ変換する制御装置と、を含む。
(もっと読む)
アクチュエータの駆動制御装置
【課題】トーションバー部分に余計なダメージを与えることなくアクチュエータの立上げ動作を円滑に行えるアクチュエータ駆動制御装置を提供する。
【解決手段】電源ONにより所定電流値の初期駆動電流を、その周波数を掃引して駆動コイルに供給し、振れ角センサの検出出力に基づいて可動部の振れ角が最大となる周波数を設定し(S1〜S3)、設定した可動部振れ角が最大となる周波数が可動部の共振周波数と一致するか否かを判定し、一致するよう駆動電流周波数を調整しながら振れ角センサの検出出力に基づいて可動部の振れ角が目標値になるよう駆動コイルに供給する駆動電流値を制御する(S4〜S9)。
(もっと読む)
電動パワーステアリング装置
【課題】二系統のモータを適切に同期制御し、操舵フーリングの良い電動パワ−ステアリング装置を提供する。
【解決手段】モータ駆動回路(26A、26B)を制御する制御手段(27)は、
走行状態に応じたアシスト電流値を演算する第1指令値演算手段(30)と、このアシスト電流値と、二系統のモータの各電流値を電流検出手段(32A、32B)により検出された各電流値を加算した電流値とにより、d/q座標系電流フィードバック演算(34,35)を行なう第2指令値演算手段(40)を有する。そして、第2指令値演算手段(40)から出力された制御信号により、二系統のモータに対応して設けたモータ駆動回路(26A、26B)及び二系統のモータ(12)を同期制御する。
(もっと読む)
電動パワーステアリング装置
【課題】通電不良発生後の継続制御時における操舵フィーリングの向上を図ることのできる電動パワーステアリング装置を提供すること。
【解決手段】制御信号出力部は、二系統の独立したモータコイルに対応して設けられた各駆動回路に対して二系統の独立した制御信号を出力する。また、電力供給の基礎指令Iq*に基づき優先指令Iq*_x及び補完指令Iq*_yを演算することにより、一方の系統について通電不良の発生が検知された場合には、他方の系統に優先指令Iq*_xを振り分けることにより、当該他方の系統に対する制御信号出力を優先する。そして、通電不良の発生相が一相のみであり、且つ基礎指令Iq*の値が優先指令Iq*_xの上限値(Iq_max/2)を超える場合には、通電不良が発生した系統の駆動回路に対し、通電不良発生相以外の二相を通電相として、その上限値の超過分に相当する補完指令Iq*_yを基礎とした電力供給を実行すべく制御信号を出力する。
(もっと読む)
操舵制御装置
【課題】歯車機構の噛み合わせにより生じる振動によって乗員に不快感を与えることを抑制できる操舵制御装置を提供する。
【解決手段】ハンドル角θhにおいてハンドルを操舵することによる歯車機構の振動により生じる振動トルクを取得する(S303、S306)。取得された振動トルクを差分トルクtmpとし(S304、S307)、EPSモータ電流指令値Icを差分トルクtmpに基づいて補正し、補正EPSモータ電流指令値Icaを算出する(S309)。これにより、歯車機構にて生じるガタや振動が入力軸を経由してハンドルへ伝達されるのを抑制することができ、運転者の不快感を低減することができる。また、歯車機構にて生じるガタや振動を、EPSモータの駆動制御により補正可能であるので、加工時の精度管理を緩和することができる。これにより、加工コストを低減することができる。
(もっと読む)
モータ制御装置
【課題】 モータが高速回転している時に電界効果トランジスタに過大な電流が流れることに起因した電界効果トランジスタの破損を防止すること。
【解決手段】 モータ制御装置1は、直流電源に接続され、スイッチ素子として電界効果トランジスタが用いられたインバータ回路70と、インバータ回路70に電気的に接続された3相モータ11と、電界効果トランジスタのスイッチング作動を制御するサスペンションECU50とを備える。また、3相モータ11に流れる相電流の飽和電流Isatが電界効果トランジスタの最大電流Imaxよりも小さい電流となるように、3相モータ11の電機子コイルUcoil,Vcoil,Wcoil,のインダクタンスが設定される。
(もっと読む)
エンコーダを有する主軸の制御装置
【課題】主軸に設けられているエンコーダから主軸速度を検出し、得られたモータのモータ速度情報を用い、誘導モータの励磁周波数のクランプ値を求め、励磁周波数の過大誤差による出力低下を防止することが可能なエンコーダを有する主軸の制御装置を提供すること。
【解決手段】エンコーダ8の一定時間内の帰還パルス数Pfbから主軸6の速度を検出する主軸速度検出部40と、主軸速度検出部40により検出した主軸の速度と前記主軸と前記誘導モータの減速比から誘導モータ2の第2の速度推定値ωrest2を求めるモータ速度推定部41と、第2の速度推定値ωrest2に基づいて誘導モータ2の励磁周波数指令ω1を決める励磁周波数指令決定部44と、を備えたことを特徴とする主軸位置を検出するエンコーダ8を備えた主軸6を、速度検出器を設けない誘導モータ2によって駆動するエンコーダ8を備えた主軸6の制御装置。
(もっと読む)
電動アクチュエータ
【課題】同一構成の電動アクチュエータを通常の電動アクチュエータとしても緊急遮断機能を持つ電動アクチュエータとしても使用できるようにする。
【解決手段】電動アクチュエータ100に、中継コネクタ10を設け、停電時電源モジュール300が接続された場合には、モータ駆動回路4が生成する第1の駆動出力M1を停電時電源モジュール300へ中継するようにする。停電時電源モジュール300に、モータ電源切替回路19を設け、交流電源ACが停電していない時には電動アクチュエータ100から送られてくる第1の駆動出力M1(交流電源ACによって生成される駆動出力)を選択させ、交流電源ACが停電している時にはモータ駆動回路18が生成する第2の駆動出力M2(停電時電源ECによって生成される駆動出力)を選択させ、中継コネクタ10を通して電動アクチュエータ100のACモータ5へ送るようにする。
(もっと読む)
永久磁石形同期電動機の制御装置
【課題】磁極位置演算誤差が大きい場合や低速運転時にも、脱調を正確に検出可能とした永久磁石形同期電動機の制御装置を提供する。
【解決手段】センサレス制御を行うための永久磁石形同期電動機の制御装置において、電動機の端子電圧相当値、電機子電流に比例する電機子抵抗電圧降下演算値及び電機子反作用磁束演算値、電機子電流の時間微分値に比例する過渡電圧演算値、並びに、速度演算値を用いて拡張誘起電圧を演算する拡張誘起電圧演算器30と、拡張誘起電圧からその角度を演算する角度演算器32と、拡張誘起電圧の角度を増幅して速度演算値を求める速度演算器33と、速度演算値を増幅して磁極位置演算値を求める磁極位置演算器34と、拡張誘起電圧の角度から脱調を検出する脱調検出器35と、を備える。
(もっと読む)
電動制御弁及び電動アクチュエータ
【課題】弁内の異物噛み込みに対応する駆動制御回路をタイマとリレーによる簡易な構成で実現した電動制御弁及び電動アクチュエータを提供する。
【解決手段】弁体の駆動規制により生じる過負荷を検出するマイクロスイッチ5と、弁本体の全閉状態を検出する全閉検出器2と、弁体の駆動方向を切り替えてから所定時間を計時するタイマ3と、弁体を駆動制御するにあたり、マイクロスイッチ5により過負荷が検出された際、全閉検出器2により全閉状態が検出されなかった場合、電動モータ1による弁体の駆動方向を切り替え、タイマ3により所定時間が計時されると元の駆動方向に復帰させるリレー4とを備える。
(もっと読む)
位置情報確認方法
【課題】磁極位置センサからの出力信号とモータ位置センサからの出力信号の関係が正しいかどうかを簡単に確認する方法を提供する。
【解決手段】モータの位置情報と磁極位置情報を受信した情報のまま表示するステップ1と、ステップ1の結果に応じて、位置情報と磁極位置情報の関係をそのままにするか、反転させるかを決定するステップ2とを備え、ステップ2において、あらかじめ決めておいた位置情報と磁極位置情報の関係が正しくないとき、検出した位置情報を反転処理して制御手段に入力する。
(もっと読む)
サーボ制御装置とそれを利用するサーボシステム
【課題】外部からの指令に基づいてエンコーダ付きモータを駆動するサーボ制御装置において、主回路モジュールの汎用性が向上できると共に、サーボ制御装置自体の低コスト化、機種統合ができ、更に、用途によって異なる指令の場合でも対応することができるサーボ制御装置を提供する。
【解決手段】インターフェースモジュールが、エンコーダ付きモータからの位置検出信号を入力し、前記指令と前記位置検出信号に基づいて位置または速度制御演算を行ない、トルク指令およびモータ電気角指令である制御指令を出力する第1の演算手段を有し、前記主回路モジュールが、前記制御指令に基づいて電流制御演算を行ない、駆動信号を出力する第2の演算手段を有する。
(もっと読む)
電動バルブ
【課題】電動バルブの異常を短時間で検出してモータのダメージを防ぐ。
【解決手段】電動バルブ1の正常時のバルブ3の移動量と所要時間を予め計測する。そののち、バルブ3を所定時間作動させたときの移動量と、そのとき、先の計測値に基づいて予測される正常時の移動量とを比較することで短時間に異常を検知する。こうすることで、電動バルブ装置1の異常を短時間で検出してモータ5のダメージを防ぐ。
(もっと読む)
エレベータ用インバータ装置
【課題】エレベータの移動時間の短縮を図り効率の良い運転ができるエレベータ用インバータ装置を提供する。
【解決手段】 交流電源1の交流電圧を直流電圧に変換する整流器2と、整流電圧を平滑するコンデンサ3と、コンデンサ3によって平滑された直流電圧を所定の周波数および電圧の交流電圧に変換する電圧形インバータ主回路4と、電圧形インバータ主回路4の周波数および電圧を制御する制御装置6を備え、交流電動機をオープンループ制御のインバータで加速・定速・減速制御し、減速制御は乗車かごが着床位置から一定の距離にある減速開始位置に到達したときに一定の減速度で減速させるエレベータ用インバータ装置において、定速周波数の運転時間を運転開始前に予め設定する一定周波数運転時間設定部14と、減速開始位置に到達後、設定した一定周波数運転時間に基づいて着床位置までの最適周波数を求める最適周波数演算部12とを備えたものである。
(もっと読む)
サーボモータにおける電流制御方法,電流制御プログラム,記録媒体,サーボモータ
【課題】余分な無効電流Idを流すことなく、的確に電圧飽和の発生を防止することができるサーボモータにおける電流制御方法を提供すること。
【解決手段】無効電流Idを、Id=−|I|・sinθ(0°≦θ≦90°)、と規定する。電圧飽和の発生を防止するために、電圧飽和の発生と直接的に関係するu,v,w各相の電機子巻線に印加する各電圧指令値Vu*,Vv*,Vw*に基づいて位相角θを制御して、無効電流Idの大きさを制御する。各電圧指令値が大きくなって電圧飽和が発生する可能性が高くなったときは、θを大きくしてIdを大きくし、各電圧指令値が小さくなって電圧飽和が発生する可能性が低くなったときは、θを小さくしてIdを小さくすることによって、電圧飽和が発生しそうな場合に限って必要最小限の無効電流Idを流すことができるので、的確に電圧飽和の発生を防止することができる。
(もっと読む)
電動機駆動装置の制御方法
【課題】潮の干満や風などの天候条件により船体と陸の相対位置が変化した場合、長期間に亘って係船していた場合にも係船位置が変化しない制御方法を提供する。
【解決手段】係船機の回転軸に連結される誘導電動機を駆動する電動機駆動装置の制御方法において、通常は、指令される前記回転軸の速度指令値に対応するように低速度制御に基づき前記電動機に所望の交流電力を前記電動機駆動装置から供給することで前記電動機を駆動し、張力制御指令が発せられたときには、定トルク制御に基づき、潮の干満や天候などの外的な条件に左右されず係船索の張力が一定となるように電動機を制御することができる。
(もっと読む)
電動機制御装置とその制御方法
【課題】 PWM信号の分解能を保持した波形歪みの少ない電動機機制御装置とその制御方法を提供する。
【解決手段】 制御部(1)は、位置指令と位置の位置偏差から速度指令を生成する位置制御部(11)と、速度指令と速度の速度偏差からトルク指令を生成する速度制御部(12)と、トルク指令から電流指令を生成する電流指令生成部と、電流指令と電流の電流偏差から電圧指令を生成する電流制御部(13)と、PWM信号のキャリア信号を生成するキャリア生成部(15)と、電圧指令と前記キャリア信号を電気信号から光信号に変換するE/O変換部(17)を備え、駆動部(2)は、光信号を電気信号に変換するO/E変換部21と、電気信号から電圧指令を再生する電圧指令再生部(22)と、電気信号からキャリア信号を再生するキャリア信号再生部(24)と、再生電圧指令と再生キャリア信号からPWM信号を生成するPWM信号生成部(23)を備えた。
(もっと読む)
慣性負荷駆動装置
【課題】 慣性負荷の減速時に得られる回生電力エネルギを有効に活用して電動機を駆動すると共に、電源設備の小容量化を図ることのできる慣性負荷駆動装置を提供する。
【解決手段】 慣性負荷1を制振対象物の揺れに応じて加減速するモータ(2)と、入力交流電力から直流電力エネルギを得るコンバータ(6)と、このコンバータを介して得られた直流電力エネルギを蓄積するコンデンサ(7)と、このコンデンサに蓄えられた直流電力エネルギおよび/または前記コンバータを介して得られた直流電力エネルギを用いてモータ(2)を駆動すると共に、モータ(2)を介して得られる回生電力エネルギを前記コンデンサ(7)に蓄積するインバータ(8)とを具備し、特にモータ(2)に加わる負荷エネルギに基づいてインバータ(8)の作動を制御すると共に、コンバータ(6)の出力電圧を制御してコンデンサへ(7)の充放電を制御する制御器(9)を備える。
(もっと読む)
1 - 20 / 22
[ Back to top ]