
Fターム[5H505MM13]の内容
交流電動機の制御一般 (51,584) | 保護、補償、監視、表示、防止 (2,003) | バックアップ(冗長化を含む) (61)
Fターム[5H505MM13]に分類される特許
1 - 20 / 61
モータ駆動装置及びそれを備える制御システム
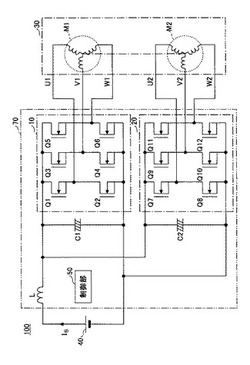
【課題】電源電流のリプルを低減できる、モータ駆動装置を提供すること。
【解決手段】モータ駆動装置70が、共通のバッテリ40からモータ30のステータコイルM1,M2に電流をそれぞれ供給する2つのインバータ部10,20と、インバータ部10がステータコイルM1に電流を供給するタイミングとインバータ部20がステータコイルM2に電流を供給するタイミングとを互いにずらす制御部50とを備えていること。制御部50は、インバータ部20のスイッチング素子Q7〜Q12をオン/オフさせる駆動信号を、インバータ部10のスイッチング素子Q1〜Q6をオン/オフさせる駆動信号よりも遅延させる。
(もっと読む)
電動パワーステアリング装置

【課題】ステアリングホイールの操舵をアシストする通常制御時に、電源リレーのショート故障を診断することの可能な電動パワーステアリング装置を提供する。
【解決手段】電源からインバータ回路を経由してモータに電力を供給する配線に設けられた電源リレーは、異常時に電源からインバータ回路への通電を遮断する。マイコンは、ステアリングホイールの操舵をアシストする通常制御時に、ステアリングホイールが操舵されていないとき(S4:NO)、電源リレーのショート故障を診断する。EPSは、ステアリングホイールの操舵がされていない時に電源リレーにより通電を遮断することで(S5)、ステアリングホイールの操舵のアシストに影響を与えることなく、電源リレーのショート故障を診断することができる。
(もっと読む)
3相回転機の制御装置
【課題】 2組の巻線組を有する3相回転機の駆動を制御する制御装置において、相電流検出値のみを用いて、インバータまたは巻線組の故障を検出する。
【解決手段】 第1系統インバータ601および第2系統インバータ602は、それぞれ3相モータ80を構成する2組の巻線組801、802に、振幅が互いに同一で、位相が互いに30°ずれる交流電流を供給する。電流検出器701、702は、インバータ601、602から巻線組801、802に通電される相電流を検出する。故障判定手段751、752は、互いに他系統の3相電流検出値に基づいて、自系統の相電流推定値を算出し、電流検出値と比較する。これにより、ECU101は、電流検出器701、702からの情報である相電流検出値のみを用いて、インバータ601、602または巻線組801、802の故障を検出することができる。
(もっと読む)
モータ制御装置
【課題】電流検出回路に故障が発生した場合でも、モータ制御の正常な動作を維持することができるモータ制御装置を提供する。
【解決手段】モータ制御装置は、インバータ回路1と、シャント抵抗Rsに流れるモータ電流を検出する第1電流検出回路10および第2電流検出回路20と、電流検出回路10、20の出力に基づいてモータ電流の検出値を算出するとともに、目標値のモータ電流を流すための指令値をPWM回路2へ出力する制御部3とを備える。第1電流検出回路10は正の第1ゲインを有し、第2電流検出回路20は第1ゲインを反転した負の第2ゲインを有する。制御部3は、第1電流検出回路10の出力に基づき算出した第1検出値と、第2電流検出回路20の出力に基づき算出した第2検出値とを用いて、電流検出回路の異常有無と、いずれの電流検出回路が異常であるかの判定を行い、正常な電流検出回路の検出値に基づいてモータ制御を行う。
(もっと読む)
電動モータおよび電動モータ制御装置
【課題】複数の駆動系統のそれぞれに故障が発生しているときにロータを回転させることが可能な電動モータ、および同モータを制御する電動モータ制御装置を提供する。
【解決手段】電動モータ10は、3相の巻線31〜33を有する第1界磁部と、3相の巻線61〜63を有する第2界磁部と、第1界磁部の第1中性点34と第2界磁部の第2中性点64との接続状態を切り替える中性点接続部21とを備える。制御装置20は、第1界磁部の各巻線31〜33の状態および第2界磁部の各巻線61〜63の状態に応じて中性点接続部21の接続状態を制御する。例えば、第1界磁部のU相およびV相に短絡故障が発生し、かつ第2界磁部のU相およびV相が使用可能なとき、中性点接続部21により第1界磁部と第2界磁部とを連結し、第1界磁部のW相と第2界磁部のU相およびV相とによりロータ14を回転させる。
(もっと読む)
電動機制御システム
【課題】本発明は、周波数電圧変換部で異常が発生したとしても、電動機の回転を確保することができる電動機制御システムを提供する。
【解決手段】本発明に係る電動機制御システム200は、回転動作を行う電動機7と、電動機7に電力を供給する電力供給源部1,3と、電力供給源部1,3から出力された電力に対して、周波数および電圧の変換を行う周波数電圧変換部5とを備えている。さらに、電動機制御システム200は、周波数電圧変換部5に異常が生じたときに、電力供給源部1,3から出力される電力を、周波数電圧変換部5を介さず、電動機7に供給するバイパス回路6と、周波数電圧変換部5に異常が生じたときに、電力供給源部1,3から出力される電力の電圧および周波数を、可変に制御する電圧周波数可変制御を行う制御部12,2,4とを、備えている。
(もっと読む)
車両用操舵装置
【課題】代替モータ回転角の検出に用いる回転角センサの分解能をモータ回転角に換算した値が90°〜180°の範囲内にある場合であっても、安定的に代替モータ回転角を用いたモータ制御を実行することのできる車両用操舵装置を提供すること。
【解決手段】マイコンは、モータ回転角センサにより検出されるモータ回転角に異常が検出された場合には、当該モータ回転角に代えて、ステアリングセンサの検出値に基づく代替モータ回転角を用いた代替制御を実行する。そして、マイコンは、代替制御に基づき換算分解能Δθ0に対応する位相遅れが生じたq軸電流指令値Iq*のq軸電流成分(第1成分Iq1)を打ち消すd軸電流指令値Id*を演算する。
(もっと読む)
モータ制御装置
【課題】モータ制御が停止している期間においても、モータ回転角度に対して信頼性を確保しながら、モータ回転角度の演算を低消費電流で継続する。
【解決手段】主演算手段101は、ブラシレスモータ5を制御する第1の動作状態と、モータ制御を停止する第2の動作状態をとる。副演算手段102は、第1の状態において、第1監視手段106で主演算手段101を監視し、第2の状態においてモータ回転角度の演算をする。これにより、モータ制御停止時においてもモータ回転角度の演算が継続できる。また、副演算手段102は、第2監視手段201で監視し、信頼性を確保する。さらに、第2の動作状態において、第1の動作状態の第1演算周期より長い第2演算周期にてモータ回転角度の演算を行うことで、消費電流が低減可能となる。
(もっと読む)
モータ駆動装置
【課題】モータ駆動用の電源に異常が起きた場合であっても、モータを良好に駆動し続けることが可能なモータ駆動装置を実現する。
【解決手段】モータ駆動装置において、モータのコアに第1巻線と第2巻線とが巻回され、第1巻線及び第2巻線のうち、第1巻線のみに電流が流れるように第1巻線と接続している第1電源と、第1巻線及び第2巻線のうち、第2巻線のみに電流が流れるように第2巻線と接続している第2電源と、第1電源及び第2電源のうち、モータを駆動するために使用する電源を選択する選択部と、を有する。選択部は、第1電源が正常であるときには、第1電源からの電流が第1巻線に流れるように、第1電源が異常であるときには、第2電源からの電流が第2巻線に流れるように、モータを駆動するために使用する電源を選択する。
(もっと読む)
電動パワーステアリング装置
【課題】センサレス制御を行う場合の電気角の推定精度を向上させる。
【解決手段】電気角推定部110は、操舵トルクTrによりモータの第1推定回転方向d1を推定する第1回転方向推定部111と、誘起電圧ベクトルの移動方向からモータの第2推定回転方向d2を推定する第2回転方向推定部114と、第1推定回転方向d1と第2推定回転方向d2とを選択的に切り替える回転方向修正部115とを備える。回転方向修正部115は、第1推定回転方向d1と第2推定回転方向d2とが相違する場合、誘起電圧ベクトルの向く方向から決まる第2推定電気角と、モータ制御で使用している推定電気角θebとが一致したタイミングで、最終推定回転方向dxを第2推定回転方向d2に切り替える。
(もっと読む)
電気推進システム
【課題】船舶に搭載した蓄電池で推進用電動機を駆動するインバータを効率よく利用する。
【解決手段】船舶に蓄電池8Aを設置してインバータ7Aにより推進用電動機1を駆動するインバータ装置17Aにおいて、停泊時に陸上電源24からの交流を船内母線20を通してインバータの出力側7Eに導入し順変換して蓄電池8Aを充電する。航行中に蓄電池8AのSOCが基準値以下に低下した場合はディーゼル発電機21の出力をダイオードコンバータ6Aよりインバータ7Aに直接供給する。
(もっと読む)
電動パワーステアリング装置
【課題】通電不良発生後の継続制御時における操舵フィーリングの向上を図ることのできる電動パワーステアリング装置を提供すること。
【解決手段】制御信号出力部は、二系統の独立したモータコイルに対応して設けられた各駆動回路に対して二系統の独立した制御信号を出力する。また、電力供給の基礎指令Iq*に基づき優先指令Iq*_x及び補完指令Iq*_yを演算することにより、一方の系統について通電不良の発生が検知された場合には、他方の系統に優先指令Iq*_xを振り分けることにより、当該他方の系統に対する制御信号出力を優先する。そして、通電不良の発生相が一相のみであり、且つ基礎指令Iq*の値が優先指令Iq*_xの上限値(Iq_max/2)を超える場合には、通電不良が発生した系統の駆動回路に対し、通電不良発生相以外の二相を通電相として、その上限値の超過分に相当する補完指令Iq*_yを基礎とした電力供給を実行すべく制御信号を出力する。
(もっと読む)
車両用電子制御装置
【課題】制御用マイコン30と、これを監視する監視用マイコン40とを搭載する場合であっても、MGECU20の信頼性が要求を満たさない懸念があること。
【解決手段】制御用マイコン30は、ウォッチドッグ信号WD1を、監視用マイコン40と制御用監視装置52とに出力する。監視用マイコン40と制御用監視装置52とは、ウォッチドッグ信号WD1が規定時間に渡って入力されない場合、制御用マイコン30に異常があると判断し、制御用マイコン30をリセットする。一方、監視用マイコン40は、監視用監視装置62にウォッチドッグ信号WD2を出力し、監視用監視装置62では、ウォッチドッグ信号WD2が規定時間に渡って入力されない場合、監視用監視装置62に異常があると判断し、監視用マイコン40をリセットする。
(もっと読む)
電動機駆動装置、および、これを用いた電動パワーステアリング装置
【課題】いずれかのインバータまたは巻線組が故障したとき、運転者に確実に故障の発生を気付かせる電動機駆動装置を提供する。
【解決手段】2つのインバータおよび2組の巻線組を備える2系統の電動機駆動装置においていずれか1系統のインバータまたは巻線組の故障を検出したとき(S20YES)、故障系統の電源リレーを遮断し(S50)、正常系統の電流供給制限値を徐々にゼロまで低減する(S60)。その後、操舵トルクが所定の閾値を超えたとき(S70YES)、正常系統の電流供給制限値を所定量増加する(S80)。正常系統の電流供給制限値が最大電流制限値に達したとき、電流供給制限値の増加を中止する(S90)。電流供給制限値を一旦ゼロまで低減させた後、徐々に操舵アシストトルクが発生する状況を作り出すことで、運転者に操舵トルクの変化を感じさせ、確実に故障発生を気付かせることができる。
(もっと読む)
電動機駆動装置、および、これを用いた電動パワーステアリング装置
【課題】いずれかのインバータまたは巻線組が故障したとき、運転者に確実に故障の発生を気付かせる電動機駆動装置を提供する。
【解決手段】2つのインバータおよび2組の巻線組を備える2系統の電動機駆動装置においていずれか1系統のインバータまたは巻線組の故障を検出したとき(S20:YES)、故障系統の電源リレーを遮断し(S50)、正常系統の電流供給制限値の上限値である最大電流制限値Irを故障検出以前の最大電流制限値と同等の値に設定する(S60)。その後、IGスイッチがオンで(S70:YES)、操舵トルク検出値Tdが所定の閾値T0を超えたとき(S80A:YES)、電流指令値に所定の振幅および周波数を有する振動成分を加算することで、運転者のハンドル操作時にハンドルを回転方向に振動させる(S90)。これにより、運転者に確実に故障発生を気付かせることができる。
(もっと読む)
電動機駆動装置、および、これを用いた電動パワーステアリング装置
【課題】いずれかのインバータまたは巻線組が故障したとき、運転者に確実に故障の発生を気付かせる電動機駆動装置を提供する。
【解決手段】2つのインバータおよび2組の巻線組を備える2系統の電動機駆動装置においていずれか1系統のインバータまたは巻線組の故障を検出したとき(S20:YES)、故障系統の電源リレーを遮断し(S50)、正常系統の電流供給制限値の上限値である最大電流制限値Irを故障検出以前の最大電流制限値と同等の値に設定する(S60)。その後、IGスイッチがオンで(S70:YES)、車速検出値Vdが所定の閾値V0未満のとき(S80:NO)、最大電流制限値Irをゼロとして電動機の駆動を停止し、操舵アシストトルクが発生しない状態を作り出す(S90)。これにより、運転者に確実に故障発生を気付かせることができる。
(もっと読む)
モータ制御装置
【課題】 演算負荷を高めずに精度良く誘起電圧を計算して電気角を推定する。
【解決手段】 簡易誘起電圧演算部111は、モータ20のインダクタンスLによる電圧成分(L・dI/dt)を含めない簡易誘起電圧e’を計算する。補正ゲイン設定部113は、補正ゲインマップを参照して、q軸指令電流Iq*が大きくなるほど小さくなる補正ゲインKLを設定する。誘起電圧補正部114は、簡易誘起電圧e’に補正ゲインKLを乗算して誘起電圧eを求める。これにより、微分演算処理を行わずに精度良く誘起電圧を計算することができる。
(もっと読む)
動力駆動制御装置および動力装置
【課題】同期モータを制御する制御回路の異常によって同期モータの駆動が不可能になっても緊急避難的に当該同期モータの駆動制御を簡単な構成で容易に行うことが可能な動力駆動制御装置を提供する。
【解決手段】同期モータ(100)の固定巻き線の電流信号(IV,IW)と同期モータの回転角度センサ(101)からのセンス出力(102)とに基づいて同期モータの回転駆動制御と回生制御を行う第1の制御部(104)と、同期ジェネレータ(200)の固定巻き線の電流信号(IV,IW)と同期ジェネレータの回転角度センサ(201)からのセンス出力(202)とに基づいて同期ジェネレータの発電制御を行う第2の制御部(204)との何れか一方の故障を他方の構成で代替する。同期モータを制御する第1の制御部と同期ジェネレータを制御する第2の制御部とが行う駆動制御と回生制御(発電制御)は表裏一体的な制御である。
(もっと読む)
駆動装置
【課題】より適正に漏電部位の切り分け判定を行なう。
【解決手段】インバータ素子温度Tinvが閾値Tref以下であるか否かを判定し(S120)、インバータ素子温度Tinvが閾値Tref以下のときには、ゲート許可でもゲート遮断での漏電判定が正常のときには漏電なし(S160)、ゲート許可でもゲート遮断でも漏電判定が異常のときには直流エリアで漏電が生じていると切り分け(S180)、ゲート遮断で漏電判定が正常でゲート許可としたときに漏電判定が異常に変化したときには交流エリアで漏電が生じていると切り分け(S200)、漏電なし,直流エリア,交流エリアのいずれにも切り分け判定されないときには切り分け不定と判定する(S210)。インバータ素子温度Tinvが閾値Tref以下のときにだけ漏電部位の切り分け判定を行なうから、より適正に漏電部位の切り分けを行なうことができる。
(もっと読む)
車両用電力変換器の制御装置
【課題】複数の制御装置をネットワークで接続する車両用電力変換器の制御装置において、接続先の制御装置のマイコン故障、ネットワーク故障を検知した場合および接続先の制御装置に高速な保護動作が必要な場合の保護動作の冗長化、高速化を図る。
【解決手段】運転指令を受ける車両制御手段1と、該手段1の制御指令に応じて電力変換器5a、5bを制御する変換器制御手段2a、2bと、両手段1、2a、2bを接続するネットワーク32a、32bと、故障信号通信手段33a、33b、34a、34bからなり、車両制御手段および変換器制御手段は、接続先の制御手段とのネットワーク通信により健全性を確認し、異常を検出した場合および接続先の制御手段に対して高速な保護動作が必要な場合、故障信号通信手段により接続先の制御手段に対して保護動作を実行する。
(もっと読む)
1 - 20 / 61
[ Back to top ]