
Fターム[5H530CD23]の内容
電動機の停止 (3,338) | 検出及び制御信号又は指令信号 (477) | 速度(回転数)又は回転方向の検出 (110) | ホール素子を用いるもの (15)
Fターム[5H530CD23]に分類される特許
1 - 15 / 15
電動機の駆動制御方法
【課題】モータが負荷保持停止位置で停止する時間を各相コイルで均一になるように駆動制御することで、各相コイルの発熱温度を均一化させた電動機の駆動制御方法を提供する。
【解決手段】制御回路7はモータコイル3に通電状態で、かつロータ2が負荷保持状態で回転停止させたロータ2の回転停止位置である負荷保持停止位置を、前回ロータ2が回転停止した負荷保持停止位置に対して電気角で((180/n)°;nは相数であり、2以上の整数)だけ所定回転方向にロータ2を回転させた位置で停止させる。
(もっと読む)
パワードア

【課題】ドア本体の駆動を一挙に解除しても、動力伝達機構の歪が漸次解放されるパワードアを実現する。
【解決手段】動力伝達機構を介してドア本体をモータ(510)の動力で駆動してドアオープニングを開閉するパワードアは、前記モータ用のオンオフ可能な回生ブレーキ回路(514)と、ウォームギヤ(532)を前記モータ側としウォームホイール(534)を前記ドア本体側として前記動力伝達機構中に存在し、ウォームギヤとウォームホイール(534)の間で可逆的に動力伝達が可能なウォーム減速機構(530)と、前記モータの回転軸(512)と前記ウォーム減速機構のウォームギヤ(532)を結合するオンオフ可能なクラッチ(520)と、前記ドア本体の駆動解除時に、前記回生ブレーキ回路(514)のオンオフ状態と前記クラッチ(520)のオンオフ状態の組み合わせを時系列的に制御する制御手段を具備する。
(もっと読む)
ドラム式洗濯機
【課題】記憶した位相差情報に基づき、ブレーキパターンの位相指令を補正することで、組み立て時のばらつきに影響されることなく、最適なブレーキ制御を維持し、インバータ回路の故障や高電圧異常検知によるオートオフを防ぐことができるドラム式洗濯機を実現する。
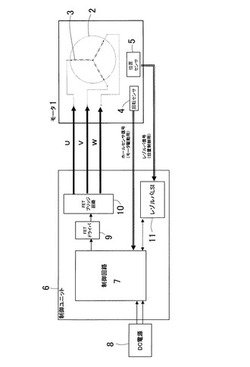
【解決手段】交流電源1に接続した整流回路3の直流電力をインバータ回路4により交流電力に変換してモータ5を駆動し、モータ5のロータ位置をロータ位置検出手段6により検出し、測定したモータ5の誘起電圧とロータ位置検出手段6からの出力信号との位相差を記憶手段15に記憶する。制御手段10は、記憶した位相差情報からブレーキパターンの位相指令を補正し、ブレーキ制御を行う。
(もっと読む)
モータ駆動装置及び光学機器
【課題】高速駆動が可能で、所定位置に駆動後、通電を切った時の停止位置精度を向上させ、省エネと高精度の両立を図ることのできるモータ駆動装置、及び該モータ駆動装置を備えた光学機器を提供する。
【解決手段】
モータ駆動装置は、コイルとロータを有するモータと、ロータの位置による信号を出力するロータ位置検出手段と、ロータ位置検出手段の出力に応じてモータのコイルへの通電状態を切り替える第1駆動モードと、決められた時間間隔によってコイルへの通電状態を切り替える第2駆動モードとを用いて目標位置にモータを駆動する制御手段と、を備えたモータ駆動装置であって、制御手段は、目標位置への駆動完了によりコイルへの通電を切った後、ロータ位置検出手段によってロータの位置が目標位置からずれていることを検出した場合は目標位置への駆動完了時における通電条件で所定時間の間、コイルに通電を行うことを特徴とする。
(もっと読む)
モータ駆動装置、ロック保護方法およびそれを用いた冷却装置
【課題】制御信号からの指示によりモータが停止した後、ただちにモータの回転を再開するとともに、消費電力を低減する。
【解決手段】冷却装置200は、モータ駆動装置100と、ファンモータ112と、ホール素子114と、を備える。モータ駆動装置100は、ロック保護回路32と、ロック制御部34とを含む。ロック制御部34は、駆動対象のファンモータ112の回転を指示する制御信号がモータの停止を所定時間以上指示した場合に、ロック保護回路32を非アクティブとする。スタンバイ制御部20は、制御信号Vcntがファンモータ112の停止を第1時間τ1以上継続して指示したことを契機として時間測定を開始し、さらに所定の第2時間τ2の経過後に、当該モータ駆動装置100の少なくとも一部を、スタンバイモードに移行させる。
(もっと読む)
自動車の駆動系の熱的過負荷保護のための方法及び装置
【課題】熱的過負荷保護のための装置及び方法である。
【解決手段】電子式の挟み込み保護を備えた調整装置の駆動系、特に自動車の窓開閉駆動部、の熱的過負荷保護のための装置及び方法を提供する。駆動系1の運転温度(TB)が決定され、温度限界値(T1)に達したとき駆動系1が非能動化され、一方電子式の挟み込み保護は能動化状態にとどまり、また温度限界値(T1)を越えたときは駆動系1へのエネルギー供給は伸長線又はヒューズの様式の安全要素14を用いて遮断される。
(もっと読む)
電動車両の停止制御方法
【課題】廉価なホールICを用いて、しかも、誤差成分の影響を最小にして高精度に電動車両の停止制御を行うようにする。
【解決手段】電動車両100は、操作レバー82と、車軸102と、操作レバー82からの操作指示に基づいて回転制御されるモータ10と、モータ10の回転力を車軸に伝達する伝達機構106と、モータ10の回転を制動するための電磁ブレーキ108と、モータ10の回転に伴って生成される一連のパルス信号に基づいてモータ10の回転速度を検出する速度検出回路50を有する。そして、操作レバー82からの操作指示がモータ10の回転停止を示し、且つ、モータ10の回転が電子制御ユニット104によって減速制御される時点から、速度検出回路50からのパルス信号の2回の立ち下がりを経過した時点を、モータ10の回転を電磁ブレーキ108によって停止させる契機の基準時点とする。
(もっと読む)
サーボモータ監視装置
【課題】サーボモータの動作について適正に異常検知を行う。
【解決手段】 サーボモータ1に接続されたモータ駆動線U,V,Wからサーボモータの磁極位置信号を取り出す磁極位置算定手段20と、サーボモータの位置検出手段からの現在位置信号を入力する現在位置信号入力手段30と、サーボモータの磁極位置信号と現在位置信号の二系統の信号に基づくサーボモータの動作を比較し、不一致が検出された場合に、サーボモータへの電源供給を遮断する停止指令信号を出力する監視手段40とを有している。
(もっと読む)
3相ブラシレスDCモータの停止装置
【課題】従来、3相ブラシレスDCモータの3相コイルのうちの2相に励磁電流を流し続けてロータを外力に抗して所定の位置に停止し続ける電気式ブレーキは得られていない。
【解決手段】本発明の3相ブラシレスDCモータの停止装置は、3相ブラシレスDCモータの3相コイル駆動制御用パワー段を有し、上記3相ブラシレスDCモータのロータ停止位置をホールIC信号として検出し、この検出状況に応じて上記3相コイル中の2相の励磁を継続せしめる。
(もっと読む)
モータ駆動式開閉システムに対する挟みこみ防止方法および装置
本発明は、モータ駆動式開閉システムに対する挟み込み防止方法および装置に関する。この方法は、以下のステップを有する:すなわち、減少したモータ速度を識別するステップと、モータを遮断するステップと、センサ信号を解析して挟み込み状況を識別するステップと、挟み込み状況が発生しているか否かを決定するステップと、挟み込み状況の識別に依存してモータを制御するステップとを有する。上記の挟み込み状況を識別する装置は、モータと、識別ユニットと、制御ユニットと、少なくとも1つのセンサとを有している。この装置は、本発明の方法を実施するために設けられた装置である。  (もっと読む)
(もっと読む)
モータ制御装置
【課題】モータ停止中におけるモータ制御装置の作動電力が低減化されたモータ制御装置を提供する。
【解決手段】電力供給されることによって作動するモータ20と、モータ20を駆動制御する制御部3と、モータ20の周辺部の温度である周辺温度を検出する温度センサ33とを備えたパワーウインドウ装置(モータ制御装置)1であって、制御部3は、モータ20の推定温度を算出する推定温度算出手段(コントローラ31)を備え、推定温度算出手段は、作動モードとして、推定温度を算出する推定温度算出モードと、推定温度の算出を停止する推定温度算出停止モードと、を有し、推定温度算出手段は、モータ停止中に所定の条件に基づいて、推定温度算出モードから推定温度算出停止モードへ作動モードを変更する。
(もっと読む)
モータ駆動装置及びモータ駆動方法
【課題】モータの停止制御を行う際に、騒音レベルの低減及び停止時間の短縮を図るモータ駆動装置を提供する。
【解決手段】モータ駆動装置は、複数相のモータ巻線L1〜L3を駆動する複数のトランジスタと、複数相のモータ巻線の駆動によって回転する回転子r1の単位時間当たりの回転数を検出して、複数のトランジスタのブレーキ動作を制御する制御回路210とを備える。制御回路210は、回転子r1の回転速度が第1の回転速度であるときには、複数相のモータ巻線L1〜L3の端子間を短絡するショートブレーキ制御を行い、回転子r1の回転速度が第1の回転速度よりも低下した第2の回転速度であるときには、複数相のモータ巻線L1〜L3に逆向きの駆動電流を印加する逆転ブレーキ制御を行い、回転子r1の回転速度が第2の回転速度よりも低下した停止直前の第3の回転速度であるときには、ショートブレーキ制御を再び行う。
(もっと読む)
自動ドアの制御方法
【課題】確実にドアの停止判定を行なうことができる自動ドアの制御方法を提供する。
【解決手段】ステップS30では、PWM値Piが設定したしきい値Ps(%)より大きいか否かを判定する。PiがPs以上であれば、ステップS35でSi=Piとする。PiがPs以上でなければ、ステップS40でSi=0とする。ステップS45では、時間積分してS=S+Siとする。続くステップS50では、PWM値の時間積分値Sを予め設定した停止判定基準値Seと比較する。S≧Seでなければ、ステップS55で変数iをインクリメントして、ステップS15に戻る。そして、ステップS15以下の処理を行って、ステップS50でS≧Seとなれば、ステップS60へ進みドア10が完全に停止したものと判定する。
(もっと読む)
モータ制御装置およびモータ推定温度の算出方法
【課題】 モータ停止後のモータの温度推定処理を精度よく、かつ、軽負荷な処理によって行うことができるモータ制御装置およびモータ推定温度の算出方法を提供する。
【解決手段】 モータ20と、その推定温度を算出する制御部3を有するパワーウインドウ装置1であって、制御部3のコントローラ31は、推定温度を記憶する温度カウンタと、モータ停止中にモータ停止時温度から第1設定温度T1までモータ温度が低下するときの1次温度勾配Δk1を、モータ停止時温度に対応して記憶しており、モータが停止した時に推定温度が、第1設定温度T1よりも大きい場合に、モータ停止時の推定温度に対応する1次温度勾配Δk1を算出し、算出した1次温度勾配Δk1を用いてモータ停止時間の経過に応じて推定温度を更新(減算)する。さらに第2設定温度T2までは繰り返し処理ごとに2次温度勾配Δk2を算出して推定温度を更新する。
(もっと読む)
モータ駆動回路、及びそれを搭載する電気洗濯機
【課題】 小型化と省電力化とをいずれも阻むことなく、回生制動の効果を更に向上させ得るモータ駆動回路、を提供する。
【解決手段】 モータ駆動回路は、出力段に三対のパワートランジスタ(QH、QL)の直列接続(7U、7V、7W)を含み、三相同期モータ(3)の三つのステータ巻線(3U、3V、3W)と共に三相ブリッジ回路を構成する。パワートランジスタ(QH、QL)はワイドバンドギャップ半導体から成り、そのボディダイオード(DH、DL)が帰還ダイオードとして利用される。マイクロコントローラ(CTL)は磁極位置センサ(HU、HV、HW)を用いてロータの磁極位置を検出し、検出結果に基づき、駆動信号(SD)を生成する。PWM制御部(8)は駆動信号(SD)に従ってパワートランジスタ(QH、QL)に対してオンオフ制御を行う。特にモータ(3)の回生モードではパワートランジスタ(QH、QL)のボディダイオード(DH、DL)に順方向電流を流す。
(もっと読む)
1 - 15 / 15
[ Back to top ]