
Fターム[5H530DD02]の内容
電動機の停止 (3,338) | 駆動又は制動の電力供給 (610) | 回路構成 (304) | 電力変換回路 (303)
Fターム[5H530DD02]の下位に属するFターム
インバータ(直/交/、交/直/交) (222)
コンバータ(交/直) (45)
チョッパ (22)
サイクロコンバータ
Fターム[5H530DD02]に分類される特許
1 - 14 / 14
不感帯処理部を備えた電動機の制御装置
【課題】被駆動体を電動機によって同一動作パターンの繰り返し制御を行う場合において、被駆動体を停止させるために電動機の位置指令をゼロにしたときに発生し得る被駆動体の振動を抑制することができる電動機の制御装置を実現する。
【解決手段】電動機Mの制御装置1は、被駆動体2の位置を検出する位置検出部11と、電動機Mに与えられる位置指令と位置検出部11で検出した被駆動体2の位置との位置偏差をサンプリング周期毎に取得する位置偏差取得部12と、位置偏差取得部12により取得した位置偏差が所定の不感帯範囲内に含まれる場合は当該位置偏差をゼロに置き換えて出力する不感帯処理部13と、不感帯処理部13から出力された位置偏差がゼロになるような補正量を算出する繰り返し制御部14とを備え、位置偏差取得部12により取得した位置偏差と繰り返し制御部14により算出された補正量とに基づいて、電動機Mを制御する。
(もっと読む)
モーター停止用の制御装置

【課題】複数のモーターが使用されているプロセスラインにおいて、連続材の破断を防止し、緊急時に、ラインの停止を早期に実現することができるモーター停止用の制御装置を提供する。
【解決手段】本制御装置は、ペイオフリール及びテンションリールの各コイル径情報と各モーターの回転数情報とが入力される入力部17と、各モーターの定格と各機械部の慣性モーメントとが予め記録された記録部18とを備える。停止時間演算部19は、各モーターについて、その時点におけるトルクで回生制動を実施した場合の停止時間を演算する。また、トルク制限値演算部20は、最大停止時間に合わせて停止させるためのトルク制限値を、各モーターについて演算する。そして、非常停止指令が入力されると、出力部21は、上記各トルク制限値を出力し、そのトルク制限値でトルク制限した回生制動を行わせる。
(もっと読む)
液体吐出装置
【課題】省電力化を図る。
【解決手段】液体を吐出するヘッドと、前記ヘッドを移動方向に移動させるキャリッジと、前記キャリッジに設けられた発電機であって、キャリッジの移動を停止させるときの制動エネルギーで発電を行う発電機と、を備える。
(もっと読む)
放電制御装置およびそれを用いたモータのブレーキ装置
【課題】モータの回生電力を消費してブレーキをかける発電型ブレーキ装置では、スイッチング素子をオン、オフして放電対象物から引き出す電流を制御していた。このため、放電対象物の出力電圧を速度信号に充分追従させることができず、力率が低下してしまい、適正なブレーキ力を得ることができないという課題があった。本発明はこの課題を解決することを目的にする。
【解決手段】指令値(速度信号)と放電対象物の電圧が入力され、これらの差が0になるような信号を出力する調節部と、この調節部の出力信号が入力され、放電電流を無段階で制御する制御部を具備した。放電電流を無段階で制御するので、正確に放電対象物の電圧を指令値に追従させることができる。
(もっと読む)
電源制御装置、および画像形成装置
【課題】モータに接続される電源の制御を好適に行うことができる電源制御装置を提供する。
【解決手段】電源制御装置は、モータに接続される電源の制御を行う電源制御装置であって、第1の直流電源116を作成するAC/DCコンバータと、第1の直流電源116から、第2の直流電源を作成するDC/DCコンバータ615と、第1の直流電源116からモータ501に向かう方向に電流を流す第1の整流素子609と、第1の直流電源116からDC/DCコンバータ615に向かう方向に電流を流す第2の整流素子611aと、モータ501からDC/DCコンバータ615に向かう方向に電流を流す第3の整流素子611bとを備える。
(もっと読む)
多軸ロボット用電源回路およびその電源回路の遮断方法
【課題】簡潔な配線で安価で信号伝達の遅れを考慮する必要がなく、信号線の断線ですべてのモータ電源をオフにする多軸ロボット用電源回路を提供する。
【解決手段】 モータ電源遮断回路を駆動する安全ユニット10において、第1入力回路11に入力信号があるとき正常とする出力信号をCPU12と論理回路13に入力し、CPU12は入力信号が入ると出力信号を論理回路13とモータ電源遮断回路19に入力し、論理回路13は2入力で1出力を第1出力回路14に入力し、第2入力回路16に入力信号があるとき正常とする出力信号をCPU12と第2出力回路17に入力し、第1入力回路11または第2入力回路16に入力が断たれると出力を出さなくなることにより、CPU12がモータ電源遮断回路19を遮断動作させる。
(もっと読む)
電子部品実装装置
【課題】停電時やサーボアンプ故障時にも、モータのダイナミックブレーキを作動させることができ、その制動力が大であっても、保守作業時には手動操作で、容易に、モータの回転軸を回転させたり、モータが駆動する動作機構を動かしたりすることができる。
【解決手段】ダイナミックブレーキ20において、リレー接点23aをオンにすることで、モータ2が発生する逆起電力は、抵抗22で消費される。これにより、ダイナミックブレーキを作用させる。モータ断路スイッチ36をオフとすると、該ダイナミックブレーキを解除でき、容易に、モータの回転軸を回転させたり、モータが駆動する動作機構を動かしたりすることができる。
(もっと読む)
1台のモータを複数の制御装置で駆動する駆動系の非常停止方法及びそのモータ制御装置
【課題】 1台のモータを複数の制御装置で駆動する駆動系の非常停止方法において、特別な信号線を設けることなく、かつ安全に非常停止する方法、及びそのモータ制御装置を提供する。
【解決手段】 マスター側制御装置1とスレーブ側制御装置2から成り、マスター側制御装置1はスレーブ側制御装置2にトルク指令を出力してスレーブ側制御装置2をトルク制御し、1台のモータを複数の制御装置で駆動する駆動系の非常停止方法において、
マスター側制御装置1に非常停止の必要が発生した場合には、マスター側制御装置1の非常停止処理部23は、スレーブ側制御装置2へのトルク指令を0にして、マスター側制御装置1を非常停止する。
(もっと読む)
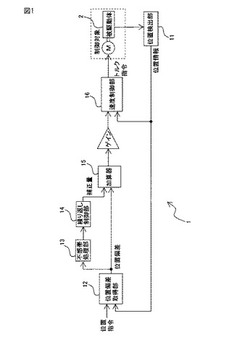
電気車の交流電動機の制御装置
【課題】 トルク発生を開始或いは停止する際に振動の発生を抑制し、かつ、トルクの変化が開始されるまでの時間を短くするための制御を簡便な手段により実現することにある。
【解決手段】 トルクの発生開始及び停止を指令Sする手段3と、励磁電流指令Idpとトルク電流指令Iqpを発生する手段4と、インバータ2に与える電圧指令Vcと周波数指令Finvを演算する手段5を有し、IdpとIqpを共に0の状態から立ち上げる際、或いは所定の値から共に0まで立ち下げる際に、IdpとIqpを共に経過時間の一次関数で変化させる。このとき、Idpが所定値に達する前にIqpの立ち上げを開始する。IdpとIqpを立ち下げる際には、Idpが0に達する前にIqpが0に達するようにそれぞれの変化率を設定する。また、Iqpが0に達した時点でIdpを0にする。
(もっと読む)
モータ焼損保護装置
【課題】モータの焼損保護の停止後にできるだけ早い駆動再開が可能であり、かつ製造コストを低廉化する。
【解決手段】操作信号の入力により、操作時間を検出する操作時間検出部12と操作回数をカウントする操作回数カウンタ13とを設け、それら時間及び回数に基づいてモータの焼損手前となる上限値を設定した上限値設定部15と、時間及び回数から過熱判定値を算出し、過熱判定値が上限値に達したらモータを停止する信号を出力する焼損保護制御部14とを設ける。サーミスタや電流センサなどの別個の部品を設けることなくモータの焼損防止制御を行うことができるため、安価なモータ焼損保護装置を提供し得ると共に、サーミスタのように復帰を待たずに駆動を再開可能となる。
(もっと読む)
固定装置におけるモータ制御
【課題】 モータによって駆動される移動部を所定の位置に固定する装置の構成が複雑化することを抑制する技術を提供する。
【解決手段】 移動部がストッパと接触する固定位置に移動部を固定する固定装置は、モータとギアとを用いて移動部を移動させる駆動部と、モータ電流を制御するモータ制御部と、固定位置を含む移動制限範囲内に移動部が位置するか否かを検知可能な位置センサと、を備えている。モータ制御部は、移動部が移動制限範囲内に無い場合には、設定停止電流以下に制限した状態でのモータ電流の供給を、移動部がストッパに接触して停止した後まで続けることによって、移動部を固定位置に固定する。また、モータ制御部は、移動部が移動制限範囲内に位置する場合には、設定停止電流よりも大きな開始電流をモータに供給することによって、固定位置から離れる方向への移動部の移動を開始させる。
(もっと読む)
電圧供給装置
【課題】 モータの逆起電圧により充電した電源を小信号回路の電源として利用することができる電圧供給装置を提供する。
【解決手段】 小信号回路15に所定電圧を供給する電源部11と、スキャナモータ3の逆起電圧を充電する充電素子9と、この充電素子9の充電電圧を検出する充電電圧検出部10と、充電素子9の充電電圧を定電圧化して出力する定電圧回路部13と、小信号回路15に対して動作電圧を供給する電源を電源部11又は定電圧回路部13に切り替える第2のスイッチ14と、充電電圧検出部10を監視して第2のスイッチ14の切り替え制御を行う監視制御部20とを備えるようにした。
(もっと読む)
電動機の制御装置
【課題】 減速停止動作時の電動モータを安全に制御する制御装置を提供する。
【解決手段】 制御装置10は、モータ12の駆動を制御する制御部14と、モータ12の動作を監視する監視部16と、制御部14がモータ12を減速停止させるときに、監視部16によって監視されたモータ12の速度が正常か異常かを判断する判断部18とを有し、判断部18がモータ12の速度を異常と判断したときは、遮断器20がモータ12への動力を強制遮断する。
(もっと読む)
電動車両の駆動制御装置
【課題】 電動車両に搭載されるアクセルセンサが断線等で異常を起こした時、より安全に車両停止、エラーの検出を行う。
【解決手段】アクセルセンサ14からの出力信号に急激な変化があった場合、アクセルセンサ値を所定期間T2、0レベルに置き換え、モータ5を停止する。期間T2の間もアクセルセンサの出力をモニタリングし、変化がない場合、期間T2が過ぎるまで0レベル置き換えを維持する。T2経過後はアクセルセンサ14の出力を読み込み、大きな変化があった時、あるいは0レベルに戻った時、モータ5を駆動させるようにして、誤検出でのエラー判定を回避する。
(もっと読む)
1 - 14 / 14
[ Back to top ]