
Fターム[5H530DD03]の内容
電動機の停止 (3,338) | 駆動又は制動の電力供給 (610) | 回路構成 (304) | 電力変換回路 (303) | インバータ(直/交/、交/直/交) (222)
Fターム[5H530DD03]に分類される特許
1 - 20 / 222
停電の有無を判定する停電判定部を有するモータ駆動装置
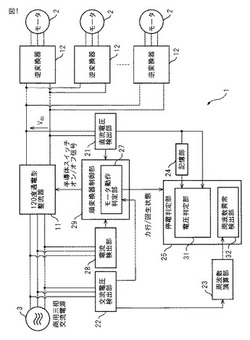
【課題】整流器回生動作中も交流電源側の停電を検出でき、停電の誤検出のないモータ駆動装置を実現する。
【解決手段】モータ駆動装置1は、交流側から供給された交流を直流に変換し、直流側から供給された直流を交流に変換する整流器11と、整流器11が出力した直流を交流に変換してモータ2へ供給し、モータ2からの回生電力を直流に変換して整流器11へ戻す逆変換器12と、整流器11の直流出力電圧を検出する直流電圧検出部21と、整流器11の交流出力電圧を検出する交流電圧検出部22と、検出された交流電圧の周波数を算出する周波数演算部23と、120度通電型整流器11の回生動作開始時点において検出された直流電圧を基準値として記憶する記憶部24と、120度通電型整流器11の回生動作期間中、検出された直流電圧と基準値と算出された交流電圧の周波数とを用いて、整流器11の交流側の停電の有無を判定する停電判定部25とを備える。
(もっと読む)
モータ駆動装置及びこれを用いた電気機器

【課題】モータの急減速時や正転/逆転切換時における電源電圧の上昇を抑制する。
【解決手段】モータ駆動装置10は、電源端とモータ30との間に接続された上側トランジスタ21U、21V、21W及びモータ30と接地端との間に接続された下側トランジスタ22U、22V、22W各々のオン/オフ制御を行うロジック回路12と、電源端に印加される電源電圧VCCと所定の保護設定値との比較結果に応じた過電圧保護信号を生成してロジック回路12に送出する過電圧保護回路18とを有し、ロジック回路12は、電源電圧VCCが保護設定値を上回ったときに上側トランジスタ21U、21V、21Wをオフとして下側トランジスタ22U、22V、22Wをオンとする。
(もっと読む)
産業用ロボットの可動部の回転軸に接続されたサーボモータを駆動するサーボモータ駆動装置
【課題】電源回生機能を産業用ロボットの操作条件に応じて追加することができるサーボモータ駆動装置を提供する。
【解決手段】サーボモータ駆動装置2は、ダイオード209a−1,209a−2,209a−3,209a−4,209a−5,209a−6を有するコンバータ201aと、産業用ロボット3の可動部の回転軸に接続されたサーボモータ300−1,300−2,...,300−mの減速駆動時に生じる回生エネルギーを、NPN型トランジスタ210aがオン状態であるときに消費する回生抵抗211aを有する回生抵抗回路202aと、回生エネルギーを三相交流電源1側に回生するコンバータ4を着脱自在に接続するコネクタ203a,204a及び多ピンコネクタ205aと、を有する。
(もっと読む)
制御方法及び制御装置
【課題】装置の大型化やコストアップを抑制しつつ、回生抵抗によって消費される回生電力を低減すること。
【解決手段】モータからの回生電力の少なくとも一部を熱エネルギとして消費する回生抵抗を備えた回生回路に接続されたモータの制御方法において、前記モータを所定の速度制御パターンで駆動する駆動工程と、該駆動工程後に前記モータを停止する待機工程と、を反復する反復工程と、前記駆動工程中、前記回生抵抗への通電状況を、監視回路にて監視する監視工程と、前記監視工程の監視結果に応じて、前記回生電力の発生が低減するように前記速度制御パターンを変更し、かつ、前記速度制御パターンの変更に伴い、前記駆動工程の実行時間を長くすると共に、前記待機工程における待機時間を短くする変更工程と、を備えたことを特徴とする。
(もっと読む)
無効電流指令作成部を有するモータ駆動装置
【課題】入力された交流を直流に変換する直流変換部と、直流変換部が出力した直流をモータの駆動のための交流に変換する交流変換部と、を備えるモータ駆動装置において、過電圧異常を抑制することができる、制御が容易で低コストおよび省スペースのモータ駆動装置を実現する。
【解決手段】モータ駆動装置は、入力された交流を直流に変換する直流変換部11と、直流変換部11が出力した直流をモータ3の駆動のための交流に変換する交流変換部12と、直流変換部11の直流出力側の電圧を検出する電圧検出部13と、電圧検出部13が検出した電圧が所定の閾値を超えたとき、交流変換部12が無効電流を出力するよう制御してモータにおける消費電力を増加させる数値制御部14と、を備える。
(もっと読む)
速度制御装置
【課題】移動体の運転速度に関係なく、制御系の時間遅れに伴う着床位置誤差の影響を解消し、所望の着床位置での位置決め精度を向上した速度制御装置を提供することを目的とする。
【解決手段】移動距離設定器26で予め設定した移動距離L*から遅れ時間移動距離演算器31で求めた移動距離Ldを減算した値(L*−Ld)を移動距離の目標値としてクリープレス運転演算器33に入力する。クリープレス運転演算器33では、位置検出器12から位置検出信号が入力された時点のモータ速度指令値N*および移動距離目標値(L*−Ld)に基づいてクリープレス運転開始時の加速度の初期値α(0)と加加速度jを演算し、加速度指令発生器23が出力する加速度指令α*をクリープレス運転演算器33で演算した加速度指令α(0)に書き換える。速度指令発生器24では、加速度指令α(0)に基づいて得られる時々刻々の速度指令値N*を出力し、所望の着床位置Cでかご7を停止する。
(もっと読む)
誘導モータで駆動される軌道走行車両の制動方法及び制動装置
【課題】緊急時制動動作中に再生式制動を無差別にオフ状態に切り替えることのない電動式制動装置を提示する。
【解決手段】集電器11を介して電力線10から電力供給を受けるDCリンク18と、整流器モード及びインバータモードで作動することができ、緊急時制動信号に応答して静止形コンバータ20が整流器モードで作動するとともに、誘導機22が交流電源モードで作動することでDCリンク18に電力を帰還させるように静止形コンバータ20を制御する静止形コンバータ制御装置36と、緊急時制動動作中は静止形コンバータ20を遮断させ、力行条件検出時には誘導機22をDCリンク18から断路するよう構成した電動式制動監視装置42とを備えている。
(もっと読む)
ロボットシステム
【課題】モータの駆動を制御する駆動制御手段の制御内容を変更することなく、高トルク運転時にモータに対して十分な電力を供給可能とするか、または減速動作時にモータから生じる回生エネルギーを有効利用可能とする。
【解決手段】昇降圧回路29は、入力電圧を昇圧して出力する昇圧動作、入力電圧を降圧して出力する降圧動作および入力電圧をそのまま出力する非昇降圧動作のいずれかの動作を実行する。電源制御部26は、エコモードに設定されると、モータMの動作状態にかかわらず、降圧動作を実行するように昇降圧回路29の動作を制御する。電源制御部26は、トルク重視モードに設定されると、バス電圧の検出値に基づいてモータMが加速動作されていると考えられる期間に昇圧動作を実行するとともに、その期間を除く期間には非昇降圧動作を実行するように昇降圧回路29の動作を制御する。
(もっと読む)
ロボットシステム
【課題】モータの駆動を制御する駆動制御手段の制御内容を変更することなく、高トルク運転時にモータに対して十分な電力を供給することができるとともに、減速動作時にモータから生じる回生エネルギーを有効利用することを可能とする。
【解決手段】昇降圧回路29は、入力電圧を昇圧して出力する昇圧動作、入力電圧を降圧して出力する降圧動作、入力電圧の供給が遮断する電源遮断動作などを実行する。電源制御部26は、バス電圧の検出値に基づいて、モータMが加速動作状態であると判断される期間には昇圧動作を実行し、減速動作状態であると判断される期間には電源遮断動作を実行し、それらの期間を除く期間には降圧動作を実行するように昇降圧回路29の動作を制御する。
(もっと読む)
電気機器の電源制御システム及び洗濯機
【課題】より簡単な構成及び制御によって待機電力をゼロにできる電気機器の電源制御システムを提供する。
【解決手段】実施形態の電気機器の電源制御システムによれば、交流電源と、この交流電源を整流回路により整流すると共に平滑コンデンサにより平滑して直流電源を生成する直流電源回路と、前記直流電源が供給されるインバータ回路と、前記交流電源と前記直流電源回路との間に配置され、駆動電流が供給されることでオンするリレーと、前記駆動電流の供給を制御すると共に、前記インバータ回路を制御する制御回路と、前記直流電源を降圧して前記制御回路に供給する制御電源を生成する制御電源回路と、前記電気機器の動作電源をオフさせるため、前記制御回路に電源オフ信号を入力するための電源オフスイッチと、前記平滑コンデンサの残留電荷を放電させる放電手段とを備え、前記制御回路は、前記電源オフ信号が入力されると、前記リレーをオフさせてから前記放電手段を介して前記平滑コンデンサの残留電荷を放電させる。
(もっと読む)
車両
【課題】衝突が発生したときに、インバータをより適性に保護しながら、電動機の回転を速やかに低下させて逆起電力を低下させる。
【解決手段】ハイブリッドECUにより衝突が検知された後に、モータMG1が所定回転数以上で回転しているときには、インバータ41の上アームトランジスタT11〜T13および下アームトランジスタT14〜T16の何れか一方のすべてをオンする三相オン制御が実行される。そして、三相オン制御の実行中には、所定時間毎に上アームトランジスタT11〜T13および下アームトランジスタT14〜T16のオンオフが切替えられる。
(もっと読む)
エレベータ制御装置
【課題】停電時における非常用バッテリ電源の消費電力を抑えながら、乗りかごを最寄り階まで救出運転させることができるエレベータ制御装置の提供。
【解決手段】本発明は、永久磁石モータ4の巻き線を短絡させるモータ巻き線短絡手段13を備え、停電時に制御部1は、負荷演算部11で演算される乗りかご8の負荷が、40%以上、60%以下であるときだけ、永久磁石モータ4の巻き線を短絡させるようにモータ巻き線短絡手段13を作動させ、電磁ブレーキ6を開放させ、乗りかご8の運転方向を検出させ、その後に永久磁石モータ4の巻き線短絡を開放させるようにモータ巻き線短絡手段13を作動させ、この状態にあって、乗りかご8の運転方向検出手段14で検出される運転方向となるように永久磁石モータ4を駆動させる制御処理を行う構成にしてある。
(もっと読む)
駆動システムおよびその駆動システムの運転方法
【課題】電気自動車において使用し又は電気自動車と一緒に使用するのに適した、故障を十分な安全性を以て抑制することを可能にする方法および装置を提供する。
【解決手段】本発明の駆動システムは、バッテリ(12)の接続を可能にする手段と、インバータ(24)と、当該インバータ(24)の入力側に設けられた中間回路(20)と、電気モータ(26)と、当該電気モータ(26)を前記インバータ(24)の出力側に接続することを可能にする手段とを有する、電気モータ(26)のための駆動システム(10)において、前記中間回路(20)内に、中間回路コンデンサ(22)が設けられており、かつ前記中間回路コンデンサ(22)に並列接続されていると共に、当該駆動システム(10)に含まれた、又は当該駆動システム(10)に付設された、オブザーバ(38)によって、作動させられる第1のサイリスタ(40)が設けられていることを特徴とする。
(もっと読む)
エレベータ制御装置
【課題】エレベータ制御装置のインバータ内のスイッチング素子の、経過時間に対する温度変化を少なくして空冷し、かつ回生抵抗器も空冷する。
【解決手段】実施形態によれば、スイッチング素子を介してインバータの直流側と接続され、電動機の回生電力を消費する回生抵抗器と、回生抵抗器およびインバータを空冷するためのファンと、乗りかごの荷重値を検出する荷重検出手段と、行先階を検出する行先階検出手段とをもつ。また、この実施形態によれば、検出した行先階と荷重値をもとに、運転開始前に、運転に伴うインバータ内のスイッチング素子と回生抵抗器の温度変化パターンを予測する温度変化予測手段と、予測した温度変化パターンをもとに、経過時間に対するインバータ内のスイッチング素子の温度変化の値が所定の基準値以下となり、かつ回生抵抗器が空冷されるように、ファンの駆動電圧および駆動時間を制御するファン制御手段とをもつ。
(もっと読む)
モータ制御装置
【課題】平滑コンデンサからスナバコンデンサまで直接的に給電接続する特別な構成を設けることなくスナバコンデンサを十分に充電する。
【解決手段】平滑コンデンサ2と、2つのアームスイッチング素子11を直列に接続した組を3組並列に接続して3相としたインバータ部3と、インバータ部3の出力側に接続されたブレーキ回路整流器21と、ブレーキ回路整流器21に並列接続した制動抵抗器23と制動スイッチング素子22と、を有するダイナミックブレーキ回路部5と、制動スイッチング素子22に並列接続したスナバコンデンサ31を含むスナバ回路部6と、各アームスイッチング素子11に対するゲート信号と制動スイッチング素子22に対するブレーキ制動信号とを出力する駆動制御部7と、を備えるモータ制御装置100であって、駆動制御部7が、通常運転前に、ダイナミックブレーキを解除する処理を行い、スナバコンデンサ31を充電制御する処理を行う。
(もっと読む)
電動アクチュエータ駆動装置及びこれを用いたアクチュエータ
【課題】機械的なブレーキ機構を採用することなく、故障等の異常が生じたアクチュエータ駆動モータをより短時間に停止拘束できるようにする。
【解決手段】本発明は、電源と、この電源から給電され、アクチュエータB1を駆動するためのアクチュエータ駆動モータ11A,11Bと、これらのアクチュエータ駆動モータ11A,11Bに対して回生ブレーキ動作を行なうためのモータ制動回路Cとを有する電動アクチェータ駆動装置であって、所要箇所に異常が発生したか否かを判定する異常発生判定手段D1と、上記モータ制動回路Cによって、アクチュエータ駆動モータ11A,11Bに対して回生ブレーキ動作を行なう回生ブレーキ手段D3とを有している。
(もっと読む)
制御装置
【課題】簡易な構成で機械式ブレーキの作動遅れ時間を自動的に設定できる制御装置を得ること。
【解決手段】制御装置は、モータと前記モータの動作を制限する機械式ブレーキとを制御する制御装置であって、前記モータを駆動するモータ駆動部と、前記機械式ブレーキを作動させるブレーキ駆動部と、前記モータ駆動部により前記モータが駆動される際の電流を検出する検出部と、前記検出された電流からトルク分電流を抽出する抽出部と、前記抽出されたトルク分電流の時間的な変化に応じて、前記機械式ブレーキの作動要求を前記ブレーキ駆動部に対して行ってから前記機械式ブレーキが実際に作動するまでの作動遅れ時間を推定して設定する設定部と、前記設定された作動遅れ時間に応じて、前記ブレーキ駆動部による前記機械式ブレーキの作動を制御するとともに、前記モータ駆動部による前記モータの動作速度を制御する制御部とを備えている。
(もっと読む)
エレベータ制御装置
【課題】電力蓄積装置を複数のセルから構成し、そのセルの過電圧を簡易に、確実に検出できるエレベータ制御装置を提供する。
【解決手段】電力蓄積装置15を複数のセルでモジュール構成し、モジュール全体の電圧を検出する電圧検出手段20を設けると共に、n個のセルSe1〜Senのうちどれかが過充電になると異常を検出し、セル過電圧信号を出力するセル電圧検出回路V1〜Vnを設ける。そして、セル電圧検出回路V1〜VnによりセルSe1〜Senのそれぞれの過電圧値Vcoを常時監視すると共に、電圧検出手段20によりモジュール全体の過電圧値Vmo(=n×Vco)を常時監視する。
(もっと読む)
内燃機関によって駆動される自動車用電気機器の運転方法
【課題】停止過程の間の内燃機関の挙動を改善する、内燃機関によって駆動される自動車用電気機器(10)の運転方法を提供する。
【解決手段】内燃機関(1)の停止のために燃料供給が中断される、内燃機関によって駆動される自動車用電気機器(10)の運転方法において、燃料供給の中断の後及び内燃機関の停止過程の間に、電気機器(10)が出力側で少なくとも一時に短絡される。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】目標停止位置に精度良く、短時間で停止させることができるモータ制御装置及びモータ制御方法を提供すること。
【解決手段】モータ制御装置は、回転センサ11で検出した検出回転速度と検出回転量とに基づいて目標停止位置でモータMを停止させるための制御部12を備える。制御部12は、そのときの検出回転速度に基づいて最大制動状態としたときの最大制動回転量を算出し、その最大制動回転量が、目標停止位置とそのときの検出回転量とに基づいた目標停止位置までの残り回転量と一致すると最大制動状態とする電力をモータMに供給し最大制動制御を行い、その後、目標停止位置とそのときの検出回転量とに基づいた目標停止位置までの残り回転量とそのときの検出回転速度とに基づいて目標停止位置でモータMが停止する回転速度を算出しその算出した回転速度となるように制動力を生じさせる電力をモータMに供給する動作を繰り返す速度制御を行う。
(もっと読む)
1 - 20 / 222
[ Back to top ]