
Fターム[5H560BB03]の内容
無整流子電動機の制御 (40,007) | 電動機の構造 (6,076) | 電機子巻線 (3,737) | 2相 (93)
Fターム[5H560BB03]に分類される特許
1 - 20 / 93
変速装置
内接ギアポンプユニット
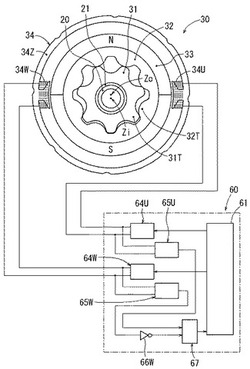
【課題】よりシンプルな構成にて、誘起電圧検出手段からの検出信号に基づいて、より低い回転数までより効率良く電動モータを回転駆動することができる内接ギアポンプユニットを提供する。
【解決手段】インナギア31とアウタギア32と電動モータとモータ制御手段60とを備え、電動モータは1組または複数組のN極とS極の磁極を有するロータ33と磁極と同数組のコイル34U、34Wとにて構成された2相モータである。モータ制御手段は、通電手段64U、64Wと誘起電圧検出手段65U、65Wとをそれぞれのコイルに対して備えており、一方の誘起電圧検出手段の検出信号を反転させる信号反転手段66Wと、信号反転手段の出力信号と他方の誘起電圧検出手段の検出信号とを重畳する信号重畳手段67とを備え、コイルへの非通電時における信号重畳手段からの出力信号に基づいて検出したコイルに対するロータの回転角度に基づいてコイルへの通電を制御する。
(もっと読む)
モータ駆動装置

【課題】外部からアナログの制御電圧によって、PWM出力電圧デューティの演算を行い、そのPWM演算器のオフセット、ゲインばらつきの影響に対して、モータ速度を一定とするモータ駆動装置を提供すること。
【解決手段】モータ制御端子の電圧がV1「V」〜V2「V」の範囲の時に前記PWM演算器の出力電圧デューティをD1%とし、同様にV2「V」〜V3「V」の範囲の時にD2%、・・・、VN「V」〜VN+1「V」の範囲の時にDN%とするモータ駆動装置である。
(もっと読む)
モータ駆動装置及びモータ駆動装置の制御方法
【課題】モータを駆動装置に組み込んだ後でも、ロータ位置検出部の位置ずれ量を特定するできるモータ駆動装置を提供する。
【解決手段】駆動パルス制御部703がステッピングモータ1をオープンループ駆動することで、ステッピングモータ1がレンズ鏡筒ユニット8を駆動し、カムピン901がカム902のカム領域904をトレースする際に、信号時刻差算出部703aの出力に基づいて、駆動パルス制御部703は磁気センサ6の位置ずれ量を特定する。そして、ステッピングモータ1をフィードバック駆動する際に、駆動パルス制御部703は磁気センサ6の位置ずれ量を補正する。
(もっと読む)
ブラシレスモータおよびこれを備える車両
【課題】ロータの回転が不安定になることが抑制される構成を備え、そのうえでコストの低減に貢献することのできるブラシレスモータおよびこれを備える車両を提供する。
【解決手段】モータは、第1U相コイル32Aおよび第2U相コイル32Bと、第1V相コイル32Cおよび第2V相コイル32Dを有する2相の第1コイル32と、第1U相コイル42Aおよび第2U相コイル42Bと、第1V相コイル42Cおよび第2V相コイル42Dとを有する2相の第2コイル42とを有している。そして、各U相コイル32A,32Bおよび各V相コイル32C,32Dの周方向Wの位置と、各U相コイル42A,42Bおよび各V相コイル42C,42Dの周方向Wの位置とが互いに異なる。
(もっと読む)
二相ブラシレスモータの駆動装置及び駆動方法
【課題】2つのステータコイルに位相差のある電流を流すことにより効率を向上させ、中性点のない直流電源に対しても適用可能な二相ブラシレスモータの駆動装置を提供する。
【解決手段】2相結線された少なくとも2つのステータコイル13,14への通電を行うスイッチング回路12と、前記少なくとも2つのステータコイル13,14への通電を同時に遮断することにより現れる逆起電圧に基づいて、前記各ステータコイル13,14とマグネットロータの相対位置を表すゼロクロス時点を検出するため比較回路20と、前記スイッチング回路12を制御することにより、前記各ステータコイル13,14に、位相が互いにずれた電流をそれぞれ通電させる制御回路23とを有し、前記制御回路23は、前記ゼロクロス時点に基づいてタイマーを生成し、このタイマーで前記スイッチング回路12の各素子の導通時間を決めることによって前記ステータコイル13,14の通電角を設定するものである。
(もっと読む)
電気機械装置、移動体及びロボット
【課題】簡単な構成で進角/遅角制御を行う。
【解決手段】電気機械装置10であって、永久磁石200と、前記永久磁石との相互作用により前記電気機械装置に回転力を発生させる複数相の電磁コイル100A、100Bと、前記電磁コイルに対する前記永久磁石の相対的な位相を検知するためのセンサー300A、300Bと、前記電磁コイルを駆動するPWM駆動回路600と、前記センサーからの出力信号を用いて相毎のPWM駆動信号を生成して制御するPWM駆動制御部500と、を備え、前記PWM駆動制御部は、三角関数の加法定理に基づいた演算器530を備えており、前記演算器を用いて、相毎に独立して進角または遅角させたPWM駆動信号を生成する。
(もっと読む)
正転逆転切替装置
【課題】チョッパ信号やPWM信号でホール素子を駆動する、トルクリップルが小さくてトルクの大きい直流同期電動機を正回転あるいは逆回転させるための正転逆転切替装置を提供する。
【解決手段】回転子の周囲に、界磁巻線が配備され、回転子の磁極位置を検出する検出手段から出力される出力信号により、界磁巻線組に供給される励磁電流を制御して、所定の回転速度を得る電動機の回転を正方向と逆方向とに切替える正転逆転切替装置であって、一の検出手段から出力される出力信号により励磁電流が供給される第一の界磁巻線組及び第二の界磁巻線組のうちの何れか一方を選択する選択子が複数具備された選択手段と、正方向の指令を受けたとき、選択子に第一の界磁巻線組を選択させ、逆方向の指令を受けたとき、選択子に第二の界磁巻線組を選択させる選択子切替手段とを備えた。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】モータ制御の安定性を好適に維持しつつ、効果的にモータ電流を抑制することのできるモータ制御装置を提供すること。
【解決手段】低減時間調整部は、「負の値」を有するγ軸電流増減値を積算制御部に出力してγ軸電流指令値Iγ**(Iγ*)の低減を許可した時点から、所定時間t_thの経過をもって、新たなγ軸電流増減値の積算によるγ軸電流指令値Iγ**の低減を許可する。そして、低減時間調整部は、γ軸電流指令値Iγ**に基づいて、当該γ軸電流指令値Iγ**の低減調整処理に用いる上記の所定時間t_thを変更する。
(もっと読む)
正逆回転可能なDCブラシレスモータ
【課題】3相以上のブラシレスモータを正逆回転させるよりも制御が容易でかつ安価な、ブラシ及び整流子を用いることなく直流電流で正回転、逆回転の双方向に回転する単相全波整流型又は2相半波整流型DCブラシレスモータを提供する。
【解決手段】上記課題を解決するため、回転子である磁石の極位置を検出する位置センサを備え、前記位置センサの磁極検出信号の出力によりスイッチング素子のオンオフを制御し、ステータに巻かれたコイルへの通電方向を変更する単相全波整流型又は2相半波整流型DCブラシレスモータにおいて、前記位置センサから前記スイッチング素子を制御する回路へ入力する2つの磁極検出信号を入れ替えることで、前記回転子を逆回転させることを特徴とする正逆回転可能なDCブラシレスモータの構成とした。
(もっと読む)
モータ駆動制御装置
【課題】ロータの停止位置によらず、ロック状態の解除後に確実にロータを再起動できるようにする。
【解決手段】モータ駆動制御装置1は、インバータ回路2と、制御回路部3と、PWM生成回路4と、回転位置検出回路5と、フィルタ回路6と、ロック保護部7とを備える。ホール信号Hpがゼロクロスしていないときにロータがロック状態になる第1のロック状態と、ホール信号Hpがゼロクロスするときにロータがロック状態になる第2のロック状態とを判別し、各ロック状態に適したロック保護動作とロータの再起動動作を行うため、ロータを安全かつ確実に再起動させることができ、モータ8の安定動作が可能となる。
(もっと読む)
電気機械制御装置
【課題】過渡的なピーク電流を抑えた短絡制動を実現すること。
【解決手段】永久磁石26、27と、3つの端子UVWと、3つの端子UVWのそれぞれに一端が接続された3相の巻線30、31、32を有する電気機械25と、複数のスイッチング素子41、42、43、44、45、46を有し3つの端子UVWに接続した短絡回路54とを備え、短絡回路54は、電気機械25の制動時に3つの端子UVWの内の2つの端子間を短絡する2線間短絡期間の後、3つの端子を短絡する3線間短絡期間を有する電気機械制御装置であり、これによって、過渡的なピーク電流値を抑えることができるものである。
(もっと読む)
DCブラシレスモータおよびその制御方法
【課題】永久磁石が不要なSRモータのスペース効率(大きさ当りの出力)を高める。
【解決手段】励磁コイル31,32を有する固定子2と、該固定子2に同軸で設けられる回転子4とを備えて構成され、SR動作を行なうDCブラシレスモータ1において、固定子を軸線Z方向の断面において半径分を大略E字状に形成して2層構造とし、そのE字の3段の平行な部分21,22,23に磁極となる複数の突起212,222,232を周方向に繰返し形成するとともに、E字の3段の平行な部分21,22,23の磁極数を等しく、かつ中段の磁極(222)の中心線Yに対して、上下段の磁極(212,232)の位置をθだけ逆方向にずれて配置することで起動を可能にする。したがって、回転子4に磁石を使用していないために低コストであり、かつ磁石の熱減磁の問題も無い。また、2相分の磁気回路は常にトルクの発生に寄与しているので、スペース効率を高められる。
(もっと読む)
電気機械の制御方法
【課題】電気機械の効率を向上させること。
【解決手段】電気機械を制御する方法が提供され、本方法は、電気機械の相巻線を供給電圧によって励起する段階と、相巻線の電流が閾値を上回ったときに相巻線をフリーホイールする段階と、を含む。次いで、閾値は、供給電圧及び/又は電気機械の速度のうちの少なくとも1つの変化に応答して調整される。加えて、本方法を実施する制御システム、並びに制御システムを備えた電気機械を提供する。
(もっと読む)
ブラシレスDCモータ及びその駆動回路
【課題】簡素な構成により正転及び逆転の制御が可能なブラシレスDCモータ及びその駆動回路を提供することを目的とする。
【解決手段】複数の突極21〜24を有する固定子20と、突極21〜24に巻回されたコイル41〜44と、固定子20に対向して配置された永久磁石31〜34を有する回転子30とを備えるブラシレスDCモータ10において、突極21〜24の先端部11〜14は、突極21〜24の中心線c1〜c4に対して左右非対称形状に形成されており、隣り合う突極21〜24は、先端部11〜14の同一形状側同士11b−12b、12a−13a、13b−14b、14a−11aが対向している。ブラシレスDCモータ10を正転・逆転動作させる駆動回路も提供される。
(もっと読む)
電気機械装置
【課題】電気機械装置の効率的な制御を行う。
【解決手段】電機機械装置であって、電磁コイルと、前記電磁コイルにPWM駆動信号を供給するためのPWM駆動回路と、前記PWM駆動回路を制御する制御部と、を備え、前記制御部は、前記電磁コイルに前記PWM駆動信号を供給する区間としての励磁区間を設定する第1の制御と、前記PWM駆動信号のデューティ比を変更する第2の制御と、を実行し、前記制御部は、前記第1の制御において、前記励磁区間の中心の位相を、前記電磁コイルに生じる逆起電力の最大値が生じる位相の値よりも早める進角制御を行うとともに、前記第2の制御において、正弦波を模擬するPWM駆動信号を生成する際のゲインを100%としたときに、100%を越えるゲインを実現するように前記デューティ比を増大させる、電機機械装置。
(もっと読む)
モータ制御装置
【課題】脱調を防止することが可能なモータ制御装置を提供する。
【解決手段】進角の制御によってモータの回転速度を制御するモータ制御装置であって、モータの現在の速度を検出する速度検出手段と、速度検出手段によって検出したモータの現在の速度とモータの目標速度との差分に基づいて進角の値を設定する第1の進角設定手段と、モータの現在の速度に基づいて進角の値を設定する第2の進角設定手段と、モータの現在の速度が第1の速度を下回る場合には、第2の進角設定手段によって設定される進角の値によってモータの回転速度を制御する制御手段を有する。
(もっと読む)
ブラシレス永久磁石モータの制御
【課題】ブラシレス永久磁石モータの制御の技術を提供する。
【解決手段】交流電圧を整流して少なくとも50%のリップルを有する整流電圧を供給する段階と、進み期間だけ逆起電力のゼロ交差の前に励起され、かつモータの各電気半サイクルにわたって導通期間中に励起されるモータの巻線を整流電圧で励起する段階とを含むブラシレス永久磁石モータを制御する方法。進み期間及び/又は導通期間は、一定の平均電力を維持するようにモータの速度及び交流電圧のRMS値のうちの一方の変化に応答して調節される。更に、本方法を実施する制御システム及び制御システムを組み込むモータシステム。
(もっと読む)
単相交流同期モータの駆動方法および駆動装置
【課題】単相インバータや位置センサを使用することなく、また調整や経年変化に関係なく、常に高効率を維持する。
【解決手段】巻線電流iaの計測値から巻線電流iaの位相φiaを求める。モータ電圧Vaの計測値から逆起電圧eaを求め、この逆起電圧eaの位相φeaを求める。巻線電流iaの位相φiaと逆起電圧eaの位相φeaとの位相差をψa=φea−φiaとして求め、現在の負荷角θpvをθpv=90゜−ψaとして求める。そして、θpv=θspとなるように、インダクタ型モータへのモータ電圧V(Va,Vb)の値を調整する。
(もっと読む)
ブラシレスモータおよびブラシ付きモータ
【課題】 ブラシレスモータあるいはブラシ付きモータにおいて、少なくとも正転方向の出力トルクを簡単な構造で増加させる。
【解決手段】 ブラシレスモータの磁極センサ46の取付位置をモータ軸41の逆転方向に所定角度オフセットすることで、制御手段47がステータ45の回転磁界を制御する際に相互に引き合うロータ43およびステータ45の異種極間の位相差を90°+前記所定角度に設定するので、モータ軸41の正転時の出力トルクを逆転時の出力トルクよりも大きくすることができる。このとき、制御手段47によるステータ45の回転磁界を制御する制御プログラムを何ら変更することなく、磁極センサ46の取付位置を所定角度オフセットするだけで済むため、極めて低コストで実現可能である。ブラシ付きモータの場合は、ブラシの取付位置をモータ軸41の逆転方向に所定角度オフセットすることで、同様の作用効果を達成することができる。
(もっと読む)
1 - 20 / 93
[ Back to top ]