
Fターム[5H560BB12]の内容
無整流子電動機の制御 (40,007) | 電動機の構造 (6,076) | 回転子 (2,339) | 永久磁石型 (2,038)
Fターム[5H560BB12]の下位に属するFターム
無着磁部分のあるもの (3)
部分的に着磁状態の違うもの (8)
部分的に形状が違うもの (4)
Fターム[5H560BB12]に分類される特許
161 - 180 / 2,023
アクチュエータ、モータ制御システム、及びモータ制御方法
【課題】信頼性又はロバスト性を向上したアクチュエータ、モータ制御システム、及びモータ制御方法を提供する。
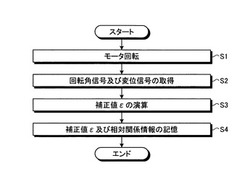
【解決手段】アクチュエータは、モータと、モータの回転角を検出する回転角センサと、モータの回転を所定の変位に変換する被駆動機構と、被駆動機構の変位を検出する位置センサと、モータを制御する制御装置と、を含み、制御装置は、正常時における回転角センサの回転角信号及び位置センサの変位信号の相対関係情報を記憶しており、変位信号を取得し、相対関係情報に基づいて回転角を推定した推定回転角信号を演算し、推定回転角信号に基づいてモータを制御する。
(もっと読む)
セル多重インバータ

【課題】パルス電圧印加によりモータに回転トルクが発生することを抑制して磁極位置を推定でき、さらにモータからの騒音やモータの発熱を抑制して磁極位置を推定できる。
【解決手段】PMモータのU、V、W相に電圧を印加する各相アームは、セルユニットU1〜U3,V1〜V3の出力端をそれぞれ直列多重接続して各セルユニットの出力を重畳させた多段の電圧を出力するセル多重インバータにおいて、インバータ起動時に、セルユニットのうちの1つのセルユニットU3のみから磁極位置推定用のパルス電圧Vdcを出力し、このパルス電圧の電気角位相を変化させながらPMモータの電機子巻線に印加し、このパルス電圧によってPMモータの巻線に流れる電流変化で求められるインダクタンスから磁極位置を推定する。
(もっと読む)
駆動装置、画像形成装置および画像形成装置の周辺装置
【課題】高効率であるとともにステッピングモータと同等の加減速時の追従性やモータの耐久性を得ることができる駆動装置、画像形成装置および画像形成装置の周辺装置を提供する。
【解決手段】駆動源としてのインナーロータ型DCブラシレスモータであるモータ101と、モータ101の出力軸の回転量と回転方向を検知するフォトセンサ122、エンコーダディスク123と、モータ101の回転を制御する制御回路121と、制御回路121からの信号に基づいてモータ101に駆動電力を供給するドライバ回路125と、を備える駆動装置151において、制御回路121が、外部から取得したモータ101の目標駆動信号と、フォトセンサ122、エンコーダディスク123から検出される検出信号とに基づいて、ドライバ回路125への信号を変化させることで、モータ101の回転速度または回転位置の少なくとも一方を制御する。
(もっと読む)
モータ駆動装置、および、それを用いたバルブタイミング調整装置
【課題】目標回転数の微小な変動に対してモータ回転数が過敏に変動するのを抑制可能なモータ駆動装置、および、それを用いたバルブタイミング調整装置を提供する。
【解決手段】目標回転数電圧信号生成部71では、目標回転数に係る目標回転数周波数信号を電圧に変換した目標回転数電圧信号を生成する。実回転数電圧信号生成部81では、実回転数に係る実回転数周波数信号を電圧に変換した実回転数電圧信号を生成する。フィードバック制御部91では、目標回転数電圧信号、および、実回転数電圧信号に基づき、実回転数が目標回転数と一致するようにモータ10への通電を制御する。また、目標回転数電圧信号の生成に係る時定数τ1は、実回転数電圧信号の生成に係る時定数τ2よりも大きい。これにより、目標回転数の微小な変動に対してモータ10の回転数が過敏に変動するのを抑制することができる。
(もっと読む)
モーター駆動用電源回路
【課題】DCセンサレスブラシレスモーターを定電流制御の電源構成にて駆動する場合に、モーターの起動失敗とモーター駆動時のモーター停止を抑制したモーター駆動用電源回路を提供することを目的とする。
【解決手段】降圧チョッパー式電源部6と、DCセンサレスブラシレスモーターを駆動するインバータ回路を具備したモーター駆動部2と、モーター駆動部2に流れる電流を検出する負荷電流検出部7と、負荷電流検出部7の検出値に応じて動作する出力電流検出部8と、出力電流検出部8の挙動に応じて出力状態を帰還する出力帰還部10と、基準電圧生成部11と、比較部14と、出力電圧固定部9と、出力電圧の電圧値に応じて出力帰還部10の動作を出力電流検出部8と出力電圧固定部9とに切替える出力帰還切替部15を具備して構成した。
(もっと読む)
ブラシレスモータの駆動制御装置
【課題】ブラシレスモータの誘起電圧にノイズが重畳していても、そのノイズの影響を排除することができ、ブラシレスモータの回転変動を抑制することができるブラシレスモータの駆動制御装置を提供する。
【解決手段】通電相切り替えタイマ1aは、ブラシレスモータ100の通電相の各相の誘起電圧が基準電圧未満となる度に、第1カウント値でセットされる。通電相歯止めタイマ1bは、ブラシレスモータ100の下流側の通電相が切り替えられたことに応じて、第2カウント値でセットされる。制御装置1は、通電相切り替えタイマ1a及び通電相歯止めタイマ1bのうちのいずれか一方のタイマがカウントダウンを終了したことに応じて、ブラシレスモータ100の通電相を切り替える。
(もっと読む)
モータの制御装置
【課題】指令速度電圧がばらついた場合でもモータの効率を向上でき、かつ、指令速度電圧が想定以上にばらついた場合でも安定した制御ができるモータの制御装置を得る。
【解決手段】モータの制御装置は、指令速度で動作するようにモータを制御するモータの制御装置であって、前記モータを駆動する駆動部と、前記指令速度に応じて、位相の進角量をステップ的に制御する進角制御部と、前記制御された進角量で進角させた位相を用いて、前記駆動部を制御する駆動制御部とを備え、前記進角制御部は、前記指令速度に応じた指令速度電圧が第1の閾値を超えて大きくなった場合、前記進角量を第1の値から前記第1の値より大きい第2の値へ変更し、前記指令速度電圧が前記第1の閾値より小さい第2の閾値を超えて小さくなった場合、前記進角量を前記第2の値から前記第1の値へ変更する。
(もっと読む)
電動機およびそれを搭載した電気機器
【課題】圧力損失など静圧が変化しても風量の変化量が極めて少ない高精度な風量−静圧特性を実現した上で、湿度の変化に応じて、湿度が高い場合は送風量を多くできる送風装置を実現できる電動機の提供を目的としている。
【解決手段】磁石回転子3の磁極部3aをポリアミド6樹脂にて形成することで、同一分子長においてアミド基が多いために、アミド基と水素結合する水分子が、さらに湿度が高い領域では周囲の水分子を引きつけ、水分子−水分子の水素結合を形成して膨潤するため、磁石回転子3の磁極部3aの外径は大きくなり、エアーギャップ18は小さくなることとなり、駆動コイル2に誘起される誘起電圧は高くなり、駆動コイル2に供給する電流が同一であれば、誘起電圧が高くなった分、軸トルクは高くなる電動機とすることができるので、常湿時に対して高湿時には換気風量が増加する風量−静圧特性が得られる。
(もっと読む)
電動工具
【課題】 力率改善回路を備えずに力率を改善することのできる電動工具を提供する。
【解決手段】 電動工具1は、複数の固定子巻線U、V、Wを有し、電圧が印加された場合に所定の誘起起電圧が発生するブラシレスモータ5と、交流電圧を整流する整流回路10と、整流された交流電圧を、誘起起電圧よりも小さな最小値を有する脈動電圧に平滑する平滑コンデンサ11と、スイッチング動作を行うことにより脈動電圧を固定子巻線U、V、Wに順次出力するインバータ回路8と、を備えたことを特徴としている。
(もっと読む)
センサレスモータの制御方法、装置及びこれら方法、装置を用いる電動装置
【課題】モータ停止状態と回転状態とにかかわらずモータのロータとステータとの相対位置を正確に検出する。
【解決手段】モータの停止状態において、駆動信号としてロータ・ステータ相対位置測定用高周波電流成分を注入する手段を含み、この注入に対応する巻線(20)に流れる電流の測定に基づいてロータとステータとの相対位置を判定する第1相対位置検出回路系(13,15,16)と、モータの稼働状態において、駆動信号にロータ・ステータ相対位置測定用高周波電流成分を重畳する手段を含み、この重畳に対応する巻線(20)に流れる電流の測定に基づいてロータとステータとの相対位置を判定する第2相対位置検出回路系(14,15,16)と、当該判定された相対位置に基づいて駆動信号を生成する駆動信号生成回路系(16,11)と、を有する。
(もっと読む)
モータ制御装置
【課題】 DCモータにおける過剰トルクの付加をすみやかに検知してDCモータの回転駆動を停止させることができるモータ制御装置を提供する。
【解決手段】 DCモータ及び駆動回路からなるモータユニットに対し、DCモータの回転駆動を許可する回転イネーブル信号を供給するモータ制御装置であって、モータユニットへの供給電流を検出し、過電流を検知する過電流検知部と、過電流の検知結果に基づいて、回転イネーブル信号を生成する回転イネーブル信号生成部により構成される。回転イネーブル信号生成部は、DCモータの起動後の一定期間内において、過電流の検知結果にかかわらず回転イネーブル信号を出力し、一定期間の経過後において、過電流が検知された場合に回転イネーブル信号の出力を停止する。
(もっと読む)
電動機制御装置
【課題】コストアップを招くことなく常に電動機を正常に制御電動機制御装置を得る。
【解決手段】位置センサ信号θdに基づき位置センサDu、Dv、Dwの故障を判定して故障判定信号Fを生成し、かつ第1の位相θ1を生成する位置センサ故障判定手段10と、故障判定信号Fおよび位置センサ信号θdに基づき電動機2の回転速度ωを演算する回転速度演算手段9と、第1の位相θ1、故障判定信号Fおよび回転速度ωに基づき位相指令θrを生成する位相指令生成手段11と、電動機2に対する駆動信号の大きさを表す振幅指令Arを生成する振幅指令生成手段7と、位相指令θrおよび振幅指令Arに基づき駆動信号を電動機2に印加する通電手段12とを備える。位相指令生成手段11は、故障判定信号Fが位置センサの一部故障を示す場合には、第1の位相θ1と、第1の位相θ1および回転速度ωに基づく第2の位相θ2とを用いて位相指令θrを生成する。
(もっと読む)
モータ制御装置
【課題】ブラシレスモータの始動時における立ち上がりの応答性を向上させる。
【解決手段】制御ユニットにてモータの停止指令が伝達されると(S121)、S122にて今回の停止指令が通常の停止指令であるか否かを判定する。通常の停止指令である場合にはS125にて通常停止制御を実行する。通常停止制御では、目標モータ回転数を停止指令伝達時の値から徐々に減少させることにより回転数制御を継続しつつモータの実回転数Nを徐々に低下させる。S126では、モータの実回転数Nと所定回転数Ns(例えば0rpm付近の値)とを比較し、N≦Nsか否かを判定する。N≦Nsとなった時点でS127に進み、ロータ位置決め処理を行う。ロータ位置決め処理では、例えば、特定の相巻線に通電してロータをわずかに回転させることにより、ロータ磁極位置を予め定めた位置まで移動させる。
(もっと読む)
3相ブラシレスモータ
【課題】部品点数の増加を抑え、小型軽量化可能な、エンコーダを備えた3相ブラシレスモータを提供することである。
【解決手段】本発明は、電機子コアおよび電機子コイルを有するステータと前記ステータの内径側に空隙を介して設けた永久磁石を有するロータとからなるモータと、前記ロータの回転位置を検出するエンコーダと、を備えた3相ブラシレスモータにおいて、前記ロータの永久磁石は回転軸と直角方向に着磁された複数の磁極をもつ磁石であり、前記ロータの磁界を検出する複数の磁気センサを有し、前記複数の磁気センサのうちの少なくとも2つを並列配置して該2つの磁気センサの出力を合成し、前記エンコーダは前記磁気センサによる合成した出力に基づいて前記ロータの回転位置を検出することを特徴とする。
(もっと読む)
同期電動機の駆動装置
【課題】同期電動機を高い応答でかつ安定的に起動させることができる同期電動機の駆動装置を提供する。
【解決手段】3相同期電動機の3相巻線のうち、通電する2つの相を選択する6通りの通電モード(1)〜(6)を切り替えることで、3相同期電動機を回転駆動する同期電動機の駆動装置であって、3相同期電動機を起動するときに、まず、6通りの通電モード(1)〜(6)のうちの1つで各相に対する通電を行った場合の角度に、3相同期電動機を位置決めする。そして、3相同期電動機を位置決めした角度に対応する通電モードから次の通電モードを1つ飛ばした通電モードに切り替えて3相同期電動機を起動させ、その後、そのときの通電モードにおける非通電相の電圧と電圧閾値との比較に基づいて、通電モードの切り替えタイミングを判断し、6通りの通電モード(1)〜(6)を順次切り替える。
(もっと読む)
モータ駆動装置
【課題】ロータマグネットの磁極数に制限無く、広範囲のブラシレスモータの駆動に使用可能なモータ駆動装置を提供する。
【解決手段】モータ駆動装置は、コイルユニットと回転軸に固定された磁極数nのマグネットを有するロータマグネットとを有するモータ本体10と、磁極検出素子11,12,13とを備えた3相n極構造のDCブラシレスモータ1を駆動する。DCブラシレスモータ1を駆動では、例えば、1つの磁極検出素子11からの出力信号の磁極数nの半分のホール信号周期からロータマグネットの1回転周期Tを演算し、正弦波駆動信号の1周期SをS=T/(n/2)により求め、正弦波駆動信号の1周期Sを1つの磁極検出素子11の出力信号の1周期毎に更新する。
(もっと読む)
制御装置、モータ制御装置、画像形成装置及び電流制御指示プログラム
【課題】過電流によるトランジスタの破損を防止する。
【解決手段】固定子巻線11a〜11cと、励磁される固定子巻線が切り換えられることにより回転する回転子と、回転子の回転位置を検出するホール素子13a〜13cとを、有するブラシレスDCモータと、電流を流すか否かが切り換えられることにより励磁する固定子巻線を切り換えるトランジスタ20a〜20fと、ホール素子により検出された回転位置から励磁する固定子巻線の切り換えタイミングを検出して電流を流すトランジスタを切り換えるプリドライバ50と、を備えるモータ制御装置101の主制御装置140であって、ホール素子により検出された回転位置から励磁される固定子巻線の切り換えタイミングを検出し、検出後一定期間、プリドライバ50に、トランジスタに流れる電流を小さくさせる。
(もっと読む)
モータの制御装置
【課題】コイルの誘起電圧と基準電圧が一致する時刻を検出して回転子の位置を検出するPWM駆動制御のDCセンサレスモータにおいて、回転子の位置検出の安定性を向上させることで乱調、騒音、振動を防止又は低減することができるモータの制御装置を提供する。
【解決手段】非通電相の誘起電圧が現れている期間に前記誘起電圧をサンプリングした複数の検出値に基づいて非通電相の誘起電圧の傾きを算出し、この算出された傾きに基づいて前記非通電相の誘起電圧が前記基準電圧と一致する時刻を予測して予測時刻とし、この予測時刻より前に実際の位置検出が行なわれなかったとき、前記予測時刻を位置検出時刻とする。
(もっと読む)
モータの制御装置
【課題】PWM制御されたモータにおいて、コイルに接続された端子の電圧が基準電圧を超えるときの回転子の位置を正しく行なってモータを制御する装置を提供する。
【解決手段】モータの制御装置は、前記基準時刻から将来における直近の位置検出までの時間を算出する次回位置検出推定時間算出手段と、前記次回位置検出推定時間算出手段での算出結果と、モータの制御指令電圧及びPWM制御のキャリア信号の周波数に基づいて将来における直近の位置検出推定時刻である次回位置検出推定時刻がPWM信号のオン区間に到来するか否かを判定する判定手段と、前記判定手段により次回位置検出推定時刻がPWM信号のオン区間に到来しない場合は、PWM制御のキャリア波形を変更するキャリア波形変更手段として機能させる。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】固定子コイルに相電流を流してモータを温める際に、同期モータにトルクを発生させず、回転子に加わる逆磁界を低減する。
【解決手段】モータ制御部40は、モータの回転子磁束と平行なd軸磁界成分を発生させるd軸電流目標値の瞬時値に所定しきい値よりも正側の値で、かつ、所定期間におけるd軸電流目標値の平均値がゼロより正側となる値を設定し、回転子磁束と直交するq軸磁界成分を発生させるq軸電流目標値に回転子が回転しない値を設定する目標電流設定部45と、d軸電流目標値とq軸電流目標値に基づいて、モータの固定子のコイルに駆動電流を流す制御を行う駆動制御部と、を備える。
(もっと読む)
161 - 180 / 2,023
[ Back to top ]