
Fターム[5H560DC20]の内容
無整流子電動機の制御 (40,007) | その他の検出 (3,633) | その他 (150)
Fターム[5H560DC20]に分類される特許
1 - 20 / 150
電動工具
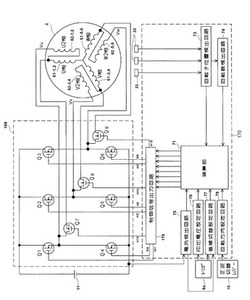
【課題】巻線仕様を変更して2種類以上のモータ特性を得るモータを備える場合に、各巻線仕様のモータ特性に対して中間的な特性を経て前記巻線仕様の切替えを行うことで、切替えた瞬間に生じる急激なトルク変化や回転数変化を回避する。
【解決手段】永久磁石回転子と、固定子4と、固定子の各ティース毎に2つのコイルを持つ巻線を有するモータと、これによって駆動される先端工具と、前記巻線へ駆動電力を供給するインバータ回路169と、これを制御する制御部170と、前記モータの起動及び回転の制御を行うためのスイッチとを備え、前記巻線は前記ティース毎に2つのコイルを有することで、2種の巻線仕様を有するものであり、制御部170は、前記モータに流れる電流に応じて2つのコイルへの通電を変化させることにより各巻線仕様のモータ特性に対して中間的な特性を経て前記巻線仕様の切替えを行う。
(もっと読む)
車両用操舵装置

【課題】操舵部材のロック状態が解除された直後から、精度の高いロータ回転角を演算することができる車両用操舵装置を提供する。
【解決手段】EPSモータ制御部33の動作モードには、通常モードと強制回転モードとがある。通常モードは、ステアリングロック装置4によってステアリングホイール1の回転がロックされていない通常運転状態においてEPSモータ7を駆動制御するモードである。一方、強制回転モードは、イグニッションキーがオンされた直後において、ステアリングロック装置4によってステアリングホイール1の回転がロックされている状態で、EPSモータ7を強制的に回転駆動するモードである。EPSモータ7が強制回転モードで回転駆動されているときに、回転角演算部34は、各磁気センサ21,22が感知している磁極を特定する。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】d軸電流指令値設定部31、d軸電流偏差演算部32、ロータ角度制御部33、ロータ角度演算部34および速度演算部35から構成されるロータ角度推定手段によって、ロータ角度θが推定される。q軸電流指令値設定部21は、トルクセンサ1によって検出される操舵トルクおよび車速センサ2によって検出される車速に応じたモータトルクをモータ5から発生させるためのq軸電流指令値Iq*を設定する。d軸電流指令値設定部24は、d軸電流指令値Id*を設定する。q軸電流指令値Iq*と、d軸電流指令値Id*と、q軸電流検出値Iqと、d軸電流検出値Idと、推定されたロータ角度θとに基づいて、モータ5に供給される電流が制御される。
(もっと読む)
電動パワーステアリング装置
【課題】モータロックを防止することにより、システムの安定的な停止が図れ、安全な電動パワーステアリング装置を提供する。
【解決手段】
マイコン17は、短絡異常検出フラグがオンの場合には、短絡異常判定検出中と判断して、積算判定を実行する。そして、マイコン17は、短絡異常確定フラグがオンの場合には、通電不良発生相以外の二相を通電相とするアシスト力を発生中に、通電不良発生相が、通電不良発生相以外の二相のうちの一相と短絡異常確定となったと判断して、アシスト力の発生を停止する。
(もっと読む)
回転電機制御装置、および、これを用いた操舵制御システム
【課題】簡単な構成で、回転電機の駆動停止時に発生するラジオノイズを低減可能な回転電機制御装置を提供する。
【解決手段】マイコン41は、各相の巻線11、12、13に流す目標電流値を算出する。マイコン41は、算出した目標電流値に基づき、各相の巻線毎にパルス状のPWM信号を生成する。プリドライバ42およびインバータ30は、マイコン41により生成されたPWM信号に基づき、各相の巻線11、12、13に電圧を印加する。マイコン41は、モータ10の駆動を停止させる制御をするとき、全ての各相のPWM信号のパルス変化のタイミングと、他の各相のPWM信号のパルス変化のタイミングとがいずれも異なるようにPWM信号を生成する。
(もっと読む)
3相回転機の制御装置
【課題】 2組の巻線組を有する3相回転機の駆動を制御する制御装置において、相電流検出値のみを用いて、インバータまたは巻線組の故障を検出する。
【解決手段】 第1系統インバータ601および第2系統インバータ602は、それぞれ3相モータ80を構成する2組の巻線組801、802に、振幅が互いに同一で、位相が互いに30°ずれる交流電流を供給する。電流検出器701、702は、インバータ601、602から巻線組801、802に通電される相電流を検出する。故障判定手段751、752は、互いに他系統の3相電流検出値に基づいて、自系統の相電流推定値を算出し、電流検出値と比較する。これにより、ECU101は、電流検出器701、702からの情報である相電流検出値のみを用いて、インバータ601、602または巻線組801、802の故障を検出することができる。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】非干渉化制御を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置および電動パワーステアリング装置を提供する。
【解決手段】モータ(1)の回転角度を微分してモータ回転角速度を演算するモータ回転角速度演算手段(60)と、そのモータ回転角速度を信号処理するローパスフィルタ(63)を有する。そして、モータの回転角度と、ローパスフィルタのゲインの関係を示すマップ(61)から演算された値により、ローパスフィルタ(63)のゲインを変更するローパスフィルタゲイン変更手段(80)を有する。そして、ゲインが変更されたローパスフィルタ(63)に基づいて出力されるモータ回転角速度に基づき、モータの逆起電力により発生する電流を相殺するように、モータに電流を流す非干渉制御を実行する。
(もっと読む)
DCブラシレスモータ
【課題】商用交流電源などのAC電源の直接入力が可能で、その商用電源の周波数に応じた速度で駆動が可能なAC入力のDCブラシレスモータを提供する。
【解決手段】本発明のAC入力のDCブラシレスモータは、駆動巻線と可動子とを少なくとも有するモータ部と、駆動巻線に駆動電力を供給するパワー素子と、駆動電力を制御するパワー制御部と、速度制御信号を発生する速度制御部と、商用交流電源が入力される端子部とを備え、パワー制御部は速度制御信号によりパワー素子の通電量を制御し、速度制御部は端子部に入力される商用交流電源の周波数に基づいて速度制御信号をパワー制御部に出力し、モータ部とパワー素子とパワー制御部と速度制御部とを少なくとも内蔵して、端子部への商用交流電源の接続によって商用電源周波数に応じた速度で駆動される。
(もっと読む)
永久磁石同期電動機の永久磁石の不可逆減磁が発生したか否かを検出する制御装置
【課題】永久磁石同期電動機の駆動軸の動作範囲が制限された場合でも永久磁石同期電動機の磁石の不可逆減磁が発生したか否かを適切に検出することができる制御装置を提供する。
【解決手段】正弦波状指令信号生成部17は、永久磁石同期電動機3へのトルク指令に対する正弦波状指令信号を生成する。推定トルク定数計算部23は、正弦波状指令信号の複数周期に亘る同一の動作状態での複数の電流値と複数の加速度値から取得した電流代表値及び加速度代表値と、永久磁石同期電動機3に関連する予め設定されたイナーシャとから、永久磁石同期電動機3に関連する推定トルク定数を計算する。減磁検出部24は、推定トルク定数と永久磁石同期電動機3に関連する予め設定されたトルク定数との差分に基づいて、永久磁石同期電動機3の永久磁石34a,34b,34c,34dに不可逆減磁が発生したか否かを検出する。
(もっと読む)
モータ制御装置及び車両用操舵装置
【課題】モータの駆動時においても、相開放スイッチのオープン故障を検出することのできるモータ制御装置及び車両用操舵装置を提供する。
【解決手段】異常検出部は、モータ21と駆動回路32との間で一方向への通電が可能、且つモータ21が高速回転していない状態で、判定対象となる特定相の相誘起電圧値が継続して異常判定閾値以下となった場合に、該特定相のリレーFETにオープン故障が発生したと判定するようにした。
(もっと読む)
車両用操舵装置
【課題】三相ブラシレスモータの駆動回路内の1つのスイッチング素子が短絡故障した場合に、短絡故障が発生したスイッチング素子を特定することが可能となる車両用操舵装置を提供する。
【解決手段】短絡故障したFETがローサイドFETであると特定された場合には、運転者による操舵が行なわれたときに、三相の各相の相電圧最大値を検出し、検出された各相の相電圧最大値を比較することにより、短絡故障相を特定する。一方、短絡故障したFETがハイサイドFETであると特定された場合には、運転者による操舵が行なわれたときに、三相の各相の相電圧最小値を検出し、検出された各相の相電圧最小値を比較することにより、短絡故障相を特定する。
(もっと読む)
電動パワーステアリング装置
【課題】3相電動モータで1相に異常が発生したときに、操舵フィーリングを悪化させることなく、残りの2相を用いてモータ駆動を継続できる電動パワーステアリング装置を提供する。
【解決手段】異常検出手段で各相コイルのうちの1相の駆動系統に通電異常を検出したとき、異常時モータ指令値算出手段34で、操舵補助電流指令値Irefに基づいて残りの2相のコイルを使用する異常時相電流指令値を算出し、その異常時相電流指令値に基づいて3相電動モータ12を駆動する。その際、操舵トルク及び前記3相電動モータ12で発生する操舵補助トルクの和と外力との釣合い時に、前記異常時相電流指令値を低下させる電流指令値補正手段を備えている。
(もっと読む)
モータ制御装置
【課題】非干渉化制御を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置を提供する。
【解決手段】モータ(1)の回転角度を微分してモータ回転角速度を演算するモータ回転角速度演算手段(60)と、そのモータ回転角速度を信号処理するローパスフィルタ(65)を有する。そして、モータ回転角速度を更に微分してモータ回転角加速度を演算するモータ回転角加速度演算手段(61)と、モータ回転角加速度演算手段(61)により演算された値により、ローパスフィルタ(65)のゲインを変更するローパスフィルタゲイン変更手段(80)を有する。そして、ゲインが変更されたローパスフィルタ(65)に基づいて出力されるモータ回転角速度に基づき、モータの速度起電力により発生する電流を相殺するように、モータ電圧指令値を定める非干渉制御を実行する。
(もっと読む)
車両用操舵装置
【課題】代替モータ回転角の検出に用いる回転角センサの分解能をモータ回転角に換算した値が90°〜180°の範囲内にある場合であっても、安定的に代替モータ回転角を用いたモータ制御を実行することのできる車両用操舵装置を提供すること。
【解決手段】マイコンは、モータ回転角センサにより検出されるモータ回転角に異常が検出された場合には、当該モータ回転角に代えて、ステアリングセンサの検出値に基づく代替モータ回転角を用いた代替制御を実行する。そして、マイコンは、代替制御に基づき換算分解能Δθ0に対応する位相遅れが生じたq軸電流指令値Iq*のq軸電流成分(第1成分Iq1)を打ち消すd軸電流指令値Id*を演算する。
(もっと読む)
モータ制御装置
【課題】電圧指令値の制限を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置を提供する。
【解決手段】PI演算値を演算するためのPI制御部と、モータの非干渉化制御のための非干渉化制御量を演算するための非干渉化制御量演算部と、PI制御手段により演算されたPI演算値と、非干渉化制御量演算部により演算された非干渉化制御量とを加算する加算部と、加算部の加算結果を制限し、制限した制御量をモータ電圧指令値として出力するリミッタと、モータの回転角速度と所定のゲインマップに基づき、目標電流ゲインを演算するゲイン演算部とを備え、ゲイン演算部によって演算された目標電流ゲインをdq軸目標電流に乗じて、モータのdq軸目標電流を制限する。
(もっと読む)
モータ制御装置及び車両用操舵装置
【課題】その目的は、モータ回転角速度を判定条件に加えることなく、精度良く通電不良を検出することのできるモータ制御装置及び車両用操舵装置を提供する。
【解決手段】通電不良検出部71は、相電流値が所定電流値以下であり、且つ電源電圧Vpsが所定電圧値以上である場合に、連続してDUTY指令値が所定電流値に対応する所定範囲の上限値以上であるという第1の判定条件、及び連続してDUTY指令値が下限値以下であるという第2の判定条件を満たすか否かを判定する。そして、通電不良検出部71は、第1の判定条件を満たす状態が継続する時間である第1の継続時間と、第2の判定条件を満たす状態が継続する時間である第2の継続時間とをそれぞれ計測し、第1又は第2の継続時間が、高速回転時におけるモータ21の回転周期に基づく判定時間を超えた場合に、通電不良が発生したと判定するようにした。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】トルク変動の発生を抑えつつ、加算角に含まれるモータ回転角速度の推定誤差を補正して、安定的にレゾルバレス制御を実行することのできるモータ制御装置を提供すること。
【解決手段】加算角調整演算部は、トルク偏差Δτに基づき第1変化成分が演算される方向に応じて、推定モータ回転角速度(ωm_e)に対応する第1の閾値dθlim1、及び当該第1の閾値dθlim1よりも推定モータ回転角速度(ωm_e)から離れた値を有した第2の閾値dθlim2を設定する。そして、これら二つの閾値(dθlim1,dθlim2)により規定される制限範囲内に加算角θaを制限する。更に、加算角調整演算部は、制御角と実回転角との乖離を示す負荷角を推定する。そして、その負荷角が安定領域外にある場合には、上記第1の閾値dθlim1を、推定モータ回転角速度(ωm_e)から、その想定される推定誤差の最大値に対応する所定値N2離れた値に変更する。
(もっと読む)
モータ駆動装置
【課題】モータ駆動用の電源に異常が起きた場合であっても、モータを良好に駆動し続けることが可能なモータ駆動装置を実現する。
【解決手段】モータ駆動装置において、モータのコアに第1巻線と第2巻線とが巻回され、第1巻線及び第2巻線のうち、第1巻線のみに電流が流れるように第1巻線と接続している第1電源と、第1巻線及び第2巻線のうち、第2巻線のみに電流が流れるように第2巻線と接続している第2電源と、第1電源及び第2電源のうち、モータを駆動するために使用する電源を選択する選択部と、を有する。選択部は、第1電源が正常であるときには、第1電源からの電流が第1巻線に流れるように、第1電源が異常であるときには、第2電源からの電流が第2巻線に流れるように、モータを駆動するために使用する電源を選択する。
(もっと読む)
ブラシレスモータ及びその制御方法
【課題】簡単な回路構成にして、インバータの一部が故障して多相の巻線のうちの1相が損傷したり、多相の巻線のうちの1相が故障したりした場合でも、電流欠損分を補うことのできるブラシレスモータを提供する。
【解決手段】電源の中性点(6a)と巻線における星型結線の中性点(2a)とを接続する中性線(8)と、複数相の巻線のうち、いずれかの相の故障を検出する故障検出手段(9)と、故障検出手段でいずれかの相の故障が検出された場合に、演算処理装置に入力された故障検出情報から相毎に故障の有無を判別する故障相判別手段と、故障相判別手段で故障なしと判別された各相の電流をX軸及びY軸直交成分に分解して合成した合成電流の電流ベクトルの軌跡が略円となるように、各相の電流の位相を変化させる位相制御手段とを備える。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】モータ制御の安定性を損なうことなく、効果的にモータ電流を抑制することのできるモータ制御装置を提供すること。
【解決手段】電流指令値制限部74は、電流指令上限値演算部73が演算する電流指令上限値Ilim以下にγ軸電流指令値を制限する。また、電流指令上限値演算部73に設けられた切替制御部75は、演算周期毎のモータ回転角変化量に相当する加算角の基礎成分、即ちトルク偏差Δτに基づく第1変化成分dθτ、及びモータの回転により生ずる誘起電圧(誘起電圧二乗和Esq_αβ)に基づいて、モータの制御状態が安定的であるか否かを判定する。そして、切替制御部75は、その制御状態が不安定であると判定した場合には、上記電流指令上限値Ilimを、当該制御状態が安定的である場合の値(Ilim_a)よりも高い値(Ilim_b)に変更すべき旨を決定する。
(もっと読む)
1 - 20 / 150
[ Back to top ]