
Fターム[5H560EB01]の内容
無整流子電動機の制御 (40,007) | 電子整流子機構の構成 (2,835) | インバータ (2,785)
Fターム[5H560EB01]に分類される特許
161 - 180 / 2,785
モータ制御装置
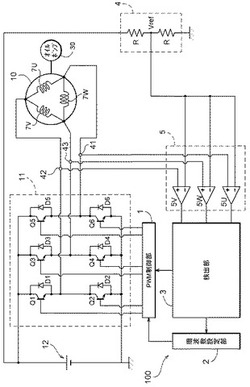
【課題】確実にモータを起動することが可能であり、低コストのモータ制御装置を提供する。
【解決手段】モータ制御装置100は、3相モータ10の起動時に、予め設定された周波数を有するPWM信号でインバータ11が有するトランジスタQ1−Q6を制御するPWM制御部1と、3相モータ10が有する各端子41−43の端子電圧と、予め設定された基準電圧Vrefとを比較する比較部5と、当該比較部5の比較結果に基づいて3相モータ10が有するロータの位置を検出する検出部3と、当該検出部3が周波数に対応する時間内にロータの位置が検出できなかった場合に、PWM信号の周波数を、検出できなかった場合のPWM信号の周波数と異なる周波数に設定する周波数設定部2と、を備える。
(もっと読む)
モータの磁極位置推定方法

【課題】磁極位置推定結果が真値に対して電気角90度以上ずれていた場合においても、不安全動作を引き起こすことのない磁極位置推定方法を提供する。
【解決手段】仮の磁極位置を基準に電気角半周期をN分割した位相に電流を印加し、そのときの移動方向D(+,0,−)を判定するステップ1と、移動方向の符号が反転する電気角領域を2分割した位相に電流を印加し、そのときの移動方向D1を判定するステップ2と、移動方向が+から0および0から−に変化する電気角領域をそれぞれ2分割した位相に電流を印加し、そのときの移動方向D2を判定するステップ3と、移動方向が0となる電気角領域の中間点を発生電磁力が零となる位相と決定するステップ4と、発生電磁力が零となる位相から90°ずらした位相を発生電磁力が最大となる位相と決定するとともに電流を印加し、その時の移動方向D3を判定するステップ5とを備える。
(もっと読む)
駆動装置、及び停止位置検出方法
【課題】モータの駆動を開始する際におけるロータの位置の検出において、モータに電力を供給する電源装置にかかる負荷を抑える。
【解決手段】駆動装置は、コイルごとに設けられたスイッチング素子を有し、スイッチング素子のオンとオフとを切り替えてコイルに通電するインバータ部と、コイルに流す電流の向きを示す複数の通電パターンから順に1つずつ選択し、選択した通電パターンに基づいてスイッチング素子のオンとオフとを、電源装置が供給できる最大電流値に応じたデューティ比で切り替えてコイルに通電させる通電パターン決定部と、通電パターンごとに、コイルに流れる電流の電流値が目標電流値に達するまでの時間である通電時間を計測する電流印加時間計測部と、電流印加時間計測部が計測した通電パターンごとの通電時間に基づいて、ロータが停止している位置を推定するロータ停止位置推定部とを備える。
(もっと読む)
モータの駆動制御プログラム、駆動制御方法及び駆動制御装置
【課題】従来のモータ制御方法では、モータの制御性を十分に確保することができない問題がある。
【解決手段】本発明にかかるモータ駆動制御プログラムは、モータの回転位置に応じて生成するPWM信号の状態を遷移させる演算コア10と、ドライバ回路3を介して前記PWM信号をモータに出力する出力インタフェース13と、ドライバ回路3がPWM信号に基づき生成した3相の駆動信号から選択した比較対象検出信号SPと3相の駆動信号の中点電圧を示すのセンタータップ電圧CTとを比較するコンパレータ15と、を有するプロセッサにおいて演算コア10で実行されるモータの駆動制御プログラムであって、コンパレータ15の出力信号の値に基づきコンパレータ積分値を増減し、コンパレータ積分値がカウント初期値に達したことに応じてモータの回転位置が遷移したことを検出し、検出結果に応じてPWM信号の状態を次状態に遷移させる。
(もっと読む)
インバータ制御回路及び電気掃除機
【課題】冷却構成を簡素化したモータ駆動用のインバータ制御回路を提供する。
【解決手段】複数の上・下アーム18a、18bから構成されるインバータ回路18をスイッチング動作させ、ブラシレスDCモータ26(以下モータ26という)を駆動する制御手段25を備え、スイッチング素子24を、スイッチング素子23よりも高速スイッチングが可能なスイッチング素子で構成し、制御手段25は、モータ26に印加する3相電圧の各相電圧において、2π/3毎に順番にスイッチング素子23をオンさせ、スイッチング素子24をオフして各相電圧を周期的に固定させ、モータ26を駆動するもので、下アーム18bに、スイッチング速度が速いスイッチング素子24を用いた場合でも、上アーム18aのスイッチング損失が下アーム18bより少なくなるように制御でき、スイッチング素子毎の損失(発熱)のばらつきを低減して冷却構成を簡素化することができる。
(もっと読む)
モータ駆動装置、集積回路装置、モータ装置、及びモータ駆動システム
【課題】上位装置から入力される動作指令情報がシリアルデータ形式及びパラレルデータ形式のいずれの場合であっても対応可能なモータ駆動装置を提供する。
【解決手段】モータ駆動装置21は、動作指令情報が入力される通信経路選択部22と、動作指令情報に基づいて駆動制御信号を出力する通信部23と、駆動制御信号に基づいてモータ50を駆動する駆動制御部24とを備えている。通信部23は、通信経路選択部22にシリアル通信経路11aを介して接続されたシリアルインターフェース部28と、通信経路選択部22にパラレル通信経路12aを介して接続されたパラレルインターフェース部29とを有する。通信経路選択部22は、シリアルデータ形式又はパラレルデータ形式の動作指令情報が共通の入力経路13を介して入力されると、そのデータ形式に応じて、シリアル通信経路11a又はパラレル通信経路12aを動作指令情報の出力経路として選択する。
(もっと読む)
モータ制御装置
【課題】電圧指令値の制限を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置を提供する。
【解決手段】PI演算値を演算するためのPI制御部と、モータの非干渉化制御のための非干渉化制御量を演算するための非干渉化制御量演算部と、PI制御手段により演算されたPI演算値と、非干渉化制御量演算部により演算された非干渉化制御量とを加算する加算部と、加算部の加算結果を制限し、制限した制御量をモータ電圧指令値として出力するリミッタと、モータの回転角速度と所定のゲインマップに基づき、目標電流ゲインを演算するゲイン演算部とを備え、ゲイン演算部によって演算された目標電流ゲインをdq軸目標電流に乗じて、モータのdq軸目標電流を制限する。
(もっと読む)
モータ制御装置
【課題】電流によるインダクタンス変動に追従した電流指令を生成して、トルク制御の精度を向上させる。
【解決手段】電流指令ベクトルの向きを示す電流位相角βrefとトルク指令Trefとを入力し、電流位相角βrefの示す方向を向く複数の電流指令ベクトルのうち、トルク指令Trefに対応する総合トルクを発生させ得る電流指令ベクトルを示すd軸電流指令Id及びq軸電流指令Iqを生成する電流指令生成部24を備え、モータに流れる電流値に応じて変化するd軸及びq軸のインダクタンス(Ld,Lq)を電流値Iaに関連付けたインダクタンス情報Da3を予め設定しておき、d軸及びq軸の電流指令(Id,Iq)を生成するにあたり、既に出力したd軸及びq軸の電流指令(Id,Iq)によってモータに流れたとみなせる電流値Iaに対応するd軸及びq軸のインダクタンス(Ld,Lq)を用いてd軸及びq軸の電流指令(Id,Iq)を生成する。
(もっと読む)
モータ制御装置およびこれを備えた空気調和機
【課題】インバータ駆動回路のドライブ信号が停止した際の、圧縮機モータ等の惰性運転時の回生により、商用電源を整流し、それを平滑する平滑キャパシタの両端の、直流電圧が過昇圧され、コンデンサ等の素子のサージ耐圧を超える問題があった。
【解決手段】制御器回路やインバータ駆動回路の電源をつくる電圧変換器を平滑キャパシタに接続し、インバータ駆動回路からドライブ信号の出力が停止し、三相同期モータが惰性運転の時、回生により平滑キャパシタに発生する直流電圧を直流電圧検出器で検出し、ある設定値を超えたらインバータ回路の下アームを全相オンさせ、誘起電圧をショートし、平滑キャパシタに発生した直流電圧は電圧変換器を介して制御器回路やインバータ駆動回路、モータ内部のインピーダンスにて消費させることで直流電圧が素子のサージ耐圧を超えることを抑制する。
(もっと読む)
圧縮機駆動装置
【課題】
三相センサレスDCブラシレスモータによって圧縮機の圧縮機構部を駆動するインバータを備えた圧縮機駆動装置には、低コストで高効率な省エネルギー性が求められている。
【解決手段】
インバータの三相スイッチング回路は、電圧の印加方向に沿って上流側となるIGBTおよび下流側となるスーパージャンクションMOSFETまたはSiC−MOSFET素子を備え、DCブラシレスモータの起動時に、1つのIGBTをオンするとともに別の直列回路の2つのスーパージャンクションMOSFETまたはSiC−MOSFET素子をオンしてDCブラシレスモータのロータの位置決めを行う位置決め通電手段を備えた。
(もっと読む)
二相ブラシレスモータの駆動装置及び駆動方法
【課題】2つのステータコイルに位相差のある電流を流すことにより効率を向上させ、中性点のない直流電源に対しても適用可能な二相ブラシレスモータの駆動装置を提供する。
【解決手段】2相結線された少なくとも2つのステータコイル13,14への通電を行うスイッチング回路12と、前記少なくとも2つのステータコイル13,14への通電を同時に遮断することにより現れる逆起電圧に基づいて、前記各ステータコイル13,14とマグネットロータの相対位置を表すゼロクロス時点を検出するため比較回路20と、前記スイッチング回路12を制御することにより、前記各ステータコイル13,14に、位相が互いにずれた電流をそれぞれ通電させる制御回路23とを有し、前記制御回路23は、前記ゼロクロス時点に基づいてタイマーを生成し、このタイマーで前記スイッチング回路12の各素子の導通時間を決めることによって前記ステータコイル13,14の通電角を設定するものである。
(もっと読む)
駆動装置
【課題】電動機を駆動するためのインバータの制御モードを矩形波制御モードから正弦波制御モードに切り替える際の電動機の出力トルクの変動を抑制する。
【解決手段】駆動電圧系の電圧VHの上昇を伴って矩形波制御モードから正弦波制御モードに切り替えるときには、矩形波制御モードから過変調制御モードに切り替えて(S200)、電流指令Id*,Iq*を保持してインバータを制御すると共に電圧VHが切替目標電圧VHchまで上昇するよう昇圧コンバータを制御し(S210〜S230)、電圧VHが保持されるよう昇圧コンバータを制御すると共に電流指令Id*,Iq*を切替目標電流Idch,Iqchに向けて等トルクライン上を移動させながらインバータを制御し(S240〜S260)、過変調制御モードから正弦波制御モードに切り替える(S270)。
(もっと読む)
ブラシレスモータの駆動制御装置
【課題】相の切替時の振動および騒音を抑制でき、かつ相の切替時に電源電流が一時的に大きく落ち込まないようにする。
【解決手段】駆動制御装置1は、インバータ回路5と、モータ駆動回路6と、モータ制御部7と、回転位置検出部8とを備える。オーバーラップ期間の開始時に、通電側(例えば上アーム側)における第1のPWM信号SG1のパルス幅を広げて、それに合わせて第2のPWM信号SG3のパルス数を増加させ、同様に、定電圧制御される下アーム側に対応する通電側(上アーム側)の第1のPWM信号SG1のパルス幅を広げる。これにより、オーバーラップ期間の開始時に電源電流IPが流れやすくなり、オーバーラップ期間内の電源電流IPの落ち込みを抑制できる。
(もっと読む)
ブラシレスモータ起動装置および起動方法
【課題】ロータ停止位置判定の誤差を少なくすることのできるブラシレスモータ起動装置および起動方法を提供する。
【解決手段】実施形態のブラシレスモータ起動装置1は、誘導電圧検出回路11が、ブラシレスモータ101の界磁コイルLU、LV、LWの中性点CN1に発生する界磁コイルの誘導電圧と、界磁コイルLU、LV、LWに並列に接続された抵抗RU、RV、RWの共通接続点である仮想中性点CN2に発生する仮想中性点電圧と、の差電圧に比例する電流を生成する。ブラシレスモータ起動装置1は、積分回路12が、1対の通電相に順方向および逆方向の電流を流したときに誘導電圧検出回路から出力される電流を、それぞれ一定期間、積分する。ブラシレスモータ起動装置1は、極性判定回路13が、積分回路12の積分値の極性を判定する。
(もっと読む)
回転機の制御装置
【課題】ブートストラップ回路を用いたシステムにおいて、モデル予測制御を適用する場合、高電位側のドライブユニットの電源となるコンデンサの電圧が低下することで、高電位側のスイッチング素子を適切に駆動することができなくなることを防止する。
【解決手段】制御装置20は、モデル予測制御によって、インバータINVの8通りの操作状態のうち、制御量とその指令値との差を最小とする操作状態を選択し、これに基づき、インバータINVを操作する。ただし、コンデンサCu,Cv,Cwの中に電圧が過度に低下するものがある場合、強制的にスイッチング素子Sun、Svn,Swnをオン状態とする。
(もっと読む)
回転機の制御装置およびその製造方法
【課題】電動機10の相電流を基本波とすべくインバータINVの出力電圧をフィードフォワード補正したのでは、電動機10のステータの巻線を鎖交する磁束が基本波からずれる場合には、トルク脈動を低減できないこと。
【解決手段】相殺電磁力出力部44は、鎖交磁束の基本波からのずれに起因した電磁力の歪を相殺する相殺電磁力についての、接線方向の相殺電磁力Fnθと、法線方向の相殺電磁力FnRと、軸線方向の相殺電磁力FnTとを各別に出力する。歪補正部36,38,40のそれぞれでは、これら相殺電磁力に応じた電圧を、制御量の制御のための操作量(指令電圧vur,vvr,vwr)に重畳する。
(もっと読む)
モータの駆動制御装置
【課題】簡素な回路構成と処理プロセスとで高効率にモータを駆動させることができるモータの駆動制御装置を提供する。
【解決手段】モータの駆動制御装置1は、モータ駆動制御部3の出力部6からモータ2の巻線に電力を供給し、モータ2を駆動する。モータ駆動制御部3は、指令情報生成部4と、駆動信号生成部5とを有している。指令情報生成部4には、モータ2の巻線電流情報と回転速度情報との組合せ対応する進角値群が予め記憶されている。指令情報生成部4は、モータ2の巻線電流情報と回転速度情報との組合せに応じて、進角値群から最適進角値を選択し、駆動信号生成部5に、最適進角値情報と速度指令情報とを出力する。駆動信号生成部5は、最適進角値情報と速度指令情報とに応じて、モータ2の駆動信号を出力部6に出力する。最適進角値は、モータ2の回転速度と巻線電流とに応じて、複雑な演算を必要とせずに求められる。
(もっと読む)
同期モータの印加電圧電気角設定方法とモータ制御装置
【課題】電流の応答遅延を考慮して印加電圧の指示値を設定できる同期モータの制御技術を提案する。
【解決手段】この提案に係る印加電圧電気角設定方法は、同期モータMの印加電圧及び電流を検出し、これら検出値に基づいて電流波高値Ipを算出すると共に現在の印加電圧位相αを算出し、目標値設定部20において電流波高値Ipに基づき目標電流位相βtargを算出してから該目標電流位相に相当する目標印加電圧位相αtargを算出し、電圧電気角指示値設定部10において、現在の印加電圧位相α及び目標印加電圧位相αtargの差を同期モータの応答時定数L/Rにより補正した変化角度Δθvと、印加電圧及び電流に基づき算出した回転速度ωと、前回の印加電圧電気角指示値θvtargと、に基づいて、新しい印加電圧電気角指示値θvtargを算出する。
(もっと読む)
モータ制御装置
【課題】処理装置の負担を軽減するとともに、位置センサの半故障状態やノイズによる外乱がある場合でも位置センサの故障を検出することができる、信頼性の高いモータ制御装置を提供すること。
【解決手段】本発明のモータ制御装置は、モータ巻線を有するステータ30と、N極およびS極の永久磁石を有するロータ31と、ロータ31の永久磁石のN極とS極の切換りを検出して位置センサ信号を出力する複数の位置センサ8と、複数の位置センサ信号を基にロータを回転させる駆動信号を出力するインバータ制御装置6と、複数の位置センサ信号の切り替わり回数を計測するセンサ信号カウント装置7とを備え、複数の位置センサ信号のうち少なくとも何れか一つの位置センサ信号の切り替わり回数が所定の回数以下の時に、モータを停止させる。
(もっと読む)
ブラシレスDCモータの駆動装置および駆動制御方法
【課題】スカラー制御のブラシレスDCモータの効率を向上する。
【解決手段】ブラシレスDCモータの駆動装置は、三相の巻線の各々の誘起電圧を測定する誘起電圧測定部と、検出された回転子の回転角と同期する周期を有する補正台形波を生成する補正台形波生成部とを備える。補正台形波と三角波との比較に基づいてモータ駆動用インバータ回路のPWM制御が行われる。補正台形波は、三相の巻線のうち通電を開始する相について誘起電圧の値から始まり傾斜した立ち上がりと、平坦なピークと、傾斜した立ち下がりとを有する。モータへの印加電圧がモータの誘起電圧より常に大きくなることにより常にトルクが発生し、効率が向上する。
(もっと読む)
161 - 180 / 2,785
[ Back to top ]